Os motores de engrenagens harmónicas desempenham um papel importante nos robôs humanóides, pois proporcionam um binário elevado, dimensões compactas, baixa folga e um controlo preciso do movimento. São amplamente utilizados em ombros, cotovelos, punhos, ancas, joelhos, tornozelos, articulações da cintura e mecanismos do pescoço.
Nos robôs humanóides, a qualidade do movimento das articulações afeta diretamente a estabilidade ao caminhar, o equilíbrio, o manuseamento de objetos e os movimentos semelhantes aos humanos. Os motores de engrenagem harmónica ajudam os robôs a moverem-se de forma mais suave, precisa e fiável.
Por que razão os robôs humanóides precisam de motores de engrenagens de precisão
Os robôs humanóides são diferentes das simples máquinas industriais. Têm de andar, virar-se, manter o equilíbrio, levantar objetos, interagir com pessoas e realizar movimentos flexíveis. Estas ações requerem que muitas articulações trabalhem em conjunto ao mesmo tempo.
Por exemplo, quando um robô humanóide caminha, a anca, o joelho, o tornozelo, a cintura e a parte superior do corpo têm de se coordenar continuamente. Se uma articulação tiver demasiada folga ou atraso, o robô pode tremer, perder o equilíbrio ou mover-se de forma pouco natural.
Consequentemente, o sistema de motores das articulações precisa de cumprir requisitos de desempenho essenciais.
| Requisito | Por que é importante nos robôs humanóides |
| Alto binário | Suporta o peso corporal, a marcha, o levantamento e o movimento das articulações |
| Baixa folga | Melhora a precisão e a estabilidade do movimento |
| Tamanho compacto | Cabe dentro de braços, pernas e articulações de robôs finos |
| Peso leve | Reduz a carga total do robô e o consumo de energia |
| Movimento suave | Torna o movimento mais natural e semelhante ao humano |
| Elevada repetibilidade | Garante ações estáveis durante tarefas repetidas |

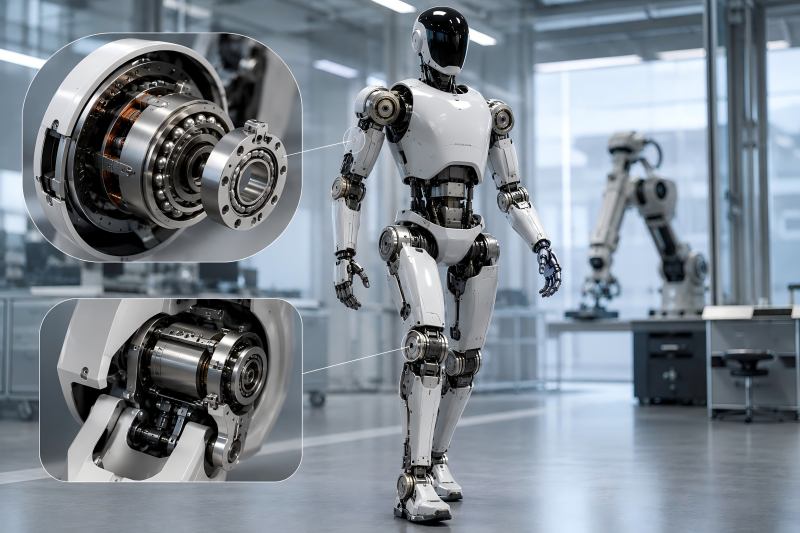
O que é um motor de engrenagem harmónica?
Um motor de engrenagem harmónica é um sistema de motor que utiliza um redutor harmónico para reduzir a velocidade e aumentar o binário. O redutor é composto por um gerador de ondas, uma ranhura flexível e uma ranhura circular.
O gerador de ondas remodela a ranhura flexível, transformando-a numa elipse. À medida que o motor gira, a ranhura flexível engata na ranhura circular. Como as duas engrenagens têm uma pequena diferença de dentes, a velocidade de saída é reduzida, enquanto o binário de saída aumenta.
Esta estrutura permite que um motor de engrenagem harmónica atinja uma elevada relação de redução num espaço muito reduzido. É especialmente útil para robôs humanóides, onde o espaço nas articulações é limitado, mas a exigência de binário é elevada.
Papel principal dos motores de engrenagem harmónica em robôs humanóides
Fornecimento de alto binário em articulações compactas
As articulações dos robôs humanóides devem ser pequenas, mas potentes. Uma articulação do braço, da perna ou da cintura de um robô não pode utilizar uma grande caixa de engrenagens industrial, pois isso tornaria o robô volumoso e pesado.
Os motores de engrenagem harmónica resolvem este problema ao oferecerem uma elevada densidade de binário. Conseguem fornecer um binário de saída forte, mantendo a articulação compacta. Isto ajuda os projetistas de robôs a construir braços mais finos, pernas mais leves e proporções corporais mais semelhantes às humanas.
Por exemplo, a articulação do ombro precisa de torque suficiente para levantar o braço. As articulações do quadril e do joelho precisam de torque ainda maior para suportar a marcha e a posição em pé. Os motores de engrenagem harmônica ajudam a atender a essas demandas de torque sem ocupar muito espaço.
Melhorar a precisão do movimento
Os robôs humanóides necessitam frequentemente de movimentos precisos. Quando um robô pega num objeto, acena com a mão, ajusta a postura ou vira a cabeça, a articulação deve parar na posição correta.
Os motores de engrenagem harmónica têm uma folga muito reduzida, o que ajuda a reduzir o erro de posicionamento. Isto é importante para:
- Braços robóticos
- Mãos e dedos
- Rotação do pescoço
- Movimento da cintura
- Equilíbrio ao caminhar
- Manipulação de objetos
A baixa folga permite que o robô se mova com maior precisão e repita a mesma ação várias vezes com resultados estáveis.
Apoio a movimentos suaves e semelhantes aos humanos
Um robô humanóide não deve mover-se como uma máquina rudimentar. O seu movimento deve ser suave, estável e controlado. Os motores de engrenagens harmónicas ajudam a alcançar este objetivo, uma vez que o seu engate de engrenagens é contínuo e compacto.
O movimento suave é importante para robôs de serviço, robôs médicos, robôs de investigação e robôs humanóides interativos. Quando um robô se move naturalmente, parece mais seguro e mais aceitável para as pessoas.
Por exemplo, quando um robô vira a cabeça, levanta o braço ou dobra o joelho, o movimento suave das articulações melhora a experiência geral do utilizador.
Áreas de aplicação nas articulações de robôs humanóides
Articulações robóticas diferentes têm requisitos de movimento diferentes. Algumas articulações necessitam de um binário elevado, enquanto outras requerem uma estrutura compacta e um controlo preciso.
| Área da Articulação do Robô | Função do motor de engrenagem harmónica | Principal benefício |
| Articulação do ombro | Controla a elevação e rotação do braço | Alto binário e tamanho compacto |
| Articulação do cotovelo | Apoia o movimento de flexão do braço | Movimento suave e preciso |
| Articulação do pulso | Permite um posicionamento flexível da mão | Baixa folga e precisão |
| Articulação da anca | Apoia a marcha e o equilíbrio corporal | Elevada capacidade de carga |
| Articulação do joelho | Controla a flexão e a extensão da perna | Elevada produção de torque |
| Articulação do tornozelo | Ajuda no equilíbrio e na estabilidade ao caminhar | Resposta rápida e precisão de controlo |
| Articulação da cintura | Permite a rotação do corpo e o ajuste da postura | Movimento rotacional estável |
| Articulação do pescoço | Controla o movimento da cabeça | Funcionamento suave e silencioso |
Por que razão os motores de engrenagens harmónicas são adequados para robôs humanóides
Elevada relação de redução
Os robôs humanóides utilizam normalmente motores de alta velocidade, mas as articulações dos robôs requerem movimentos mais lentos e mais fortes. Um redutor harmónico pode proporcionar uma elevada relação de redução num único estágio, convertendo a velocidade do motor em binário útil para a articulação.
Isto ajuda o robô a mover-se com força e controlo, em vez de uma velocidade descontrolada.
Baixa folga
A folga pode causar frouxidão nas articulações, tremores e posicionamento impreciso. Em robôs humanóides, isto pode afetar o equilíbrio ao andar, o controlo dos braços e o manuseamento de objetos.
Os motores de engrenagem harmónica são conhecidos pela sua baixa folga, o que ajuda a melhorar a estabilidade e a precisão do robô.
Design compacto e leve
O espaço é limitado no interior das articulações dos robôs humanóides. Os motores de engrenagem harmónica são compactos, o que facilita a sua integração em braços, pernas, pulsos e tornozelos.
Uma articulação mais leve também reduz a carga sobre outras articulações. Por exemplo, se o motor do braço for mais leve, a articulação do ombro necessita de menos binário para levantar o braço.
Elevada densidade de binário
A densidade de binário significa a quantidade de binário que um sistema de motor pode fornecer em comparação com o seu tamanho e peso. Os motores de engrenagens harmónicas proporcionam uma elevada densidade de binário, o que é essencial para o design de robôs humanóides.
Isto permite que os robôs realizem movimentos mais fortes sem utilizar atuadores de grandes dimensões.
Motor de engrenagem harmónica vs. outras soluções para articulações robóticas
Os robôs humanóides também podem utilizar motores de engrenagens planetárias, redutores cicloidais, motores de acionamento direto ou sistemas de transmissão por correia. No entanto, os motores de engrenagens harmónicas são frequentemente escolhidos quando a precisão e a compacticidade são as principais prioridades.
| Item | Motor de engrenagem harmónica | Motor de engrenagem planetária | Motor de acionamento direto |
| Folga | Muito baixo | Baixa a média | Sem folga da caixa de engrenagens |
| Densidade de binário | Elevada | Média a alta | Mais baixa, a menos que o motor seja grande |
| Tamanho | Muito compacto | Compacto | Normalmente maior |
| Precisão | Excelente | Boa | Excelente |
| Relação de redução | Elevada num único estágio | Requer várias fases para uma relação elevada | Sem redução |
| Custo | Médio a elevado | Médio | Elevado para binário elevado |
| Melhor utilização | Articulações de robôs de precisão | Articulações de automação geral | Articulações de controlo de binário de alta qualidade |
Como os motores de engrenagem harmónica ajudam os robôs a andar
Andar é uma das tarefas mais difíceis para os robôs humanóides. O robô tem de manter o equilíbrio enquanto move as pernas, transfere o peso e ajusta a postura em tempo real.
Os motores de engrenagens harmónicas ajudam no desempenho da marcha de várias formas.
Em primeiro lugar, fornecem torque suficiente para as articulações da anca, joelho e tornozelo. Estas articulações devem suportar o corpo do robô e controlar o movimento das pernas.
Em segundo lugar, a baixa folga ajuda a reduzir movimentos indesejados nas articulações. Isto melhora o equilíbrio e torna a marcha mais estável.
Em terceiro lugar, o design compacto reduz o peso das pernas. Pernas mais leves requerem menos energia para se moverem, ajudando a melhorar a eficiência.
Em quarto lugar, o posicionamento preciso permite um melhor controlo da marcha. O robô pode colocar o pé com maior precisão e ajustar a sua postura de forma mais suave.
Como os motores de engrenagens harmónicas melhoram os braços e as mãos dos robôs
Os braços robóticos necessitam de precisão e flexibilidade. Um robô humanóide pode precisar de pegar em objetos, segurar ferramentas, abrir portas, premir botões ou apertar a mão.
Os motores de engrenagens harmónicas são úteis nas articulações dos braços porque proporcionam um movimento suave e preciso. Ajudam o robô a controlar o ombro, o cotovelo e o pulso com melhor repetibilidade.
No caso das mãos robóticas, podem ser utilizados motores de engrenagens harmónicas mais pequenos ou microatuadores de precisão para controlar o movimento dos dedos. Embora nem todas as articulações dos dedos utilizem um motor de engrenagens harmónicas, o objetivo de design permanece o mesmo: tamanho compacto, controlo preciso e binário fiável.
Fatores importantes de seleção
Ao escolher motores de engrenagem harmónica para robôs humanóides, os engenheiros precisam de considerar mais do que o binário nominal. O motor deve ser compatível com todo o sistema robótico.
Binário e capacidade de carga
O motor deve fornecer torque suficiente para movimento, retenção de carga, aceleração e condições de impacto. As articulações do quadril, joelho e tornozelo geralmente requerem torque mais alto do que as articulações do punho ou pescoço.
Peso e tamanho
Um motor mais pequeno e leve ajuda a reduzir o peso total do robô. Isto é especialmente importante para robôs humanóides móveis que necessitam de um longo tempo de funcionamento.
Folga e precisão de posicionamento
Uma folga reduzida é fundamental para a estabilidade ao andar, o manuseamento de objetos e o controlo preciso da postura.
Eficiência e controlo de calor
Os robôs humanóides podem funcionar continuamente, pelo que o calor excessivo do motor pode reduzir a eficiência, encurtar a vida útil ou danificar peças internas.
Vida útil
A ranhura flexível no interior de um redutor harmónico funciona através da deformação elástica. Por conseguinte, a resistência à fadiga, a qualidade do material, a lubrificação e o projeto de carga devem ser cuidadosamente considerados.
Desafios comuns
Embora os motores de engrenagem harmónica sejam altamente adequados para robôs humanóides, também apresentam algumas limitações.
Um dos desafios é o custo. Os motores de engrenagem harmónica são geralmente mais caros do que os motores de engrenagem simples. Para robôs com muitas articulações, o custo total dos atuadores pode ser elevado.
Outro desafio é a carga de choque. Impactos repentinos causados por quedas, saltos ou movimentos rápidos podem afetar a vida útil do redutor. Os engenheiros devem projetar margens de torque adequadas e proteção mecânica.
O calor também é importante. As articulações compactas dos robôs podem ter espaço de refrigeração limitado, pelo que o projeto térmico deve ser considerado desde o início.
