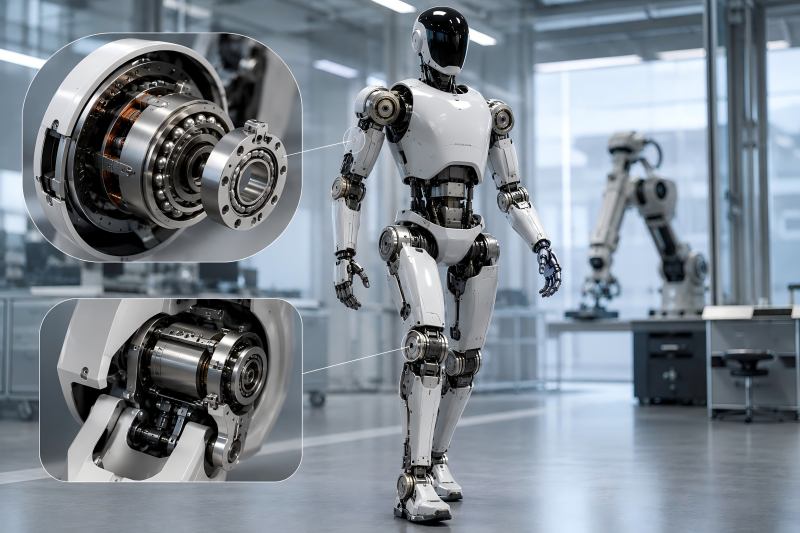
ハーモニックギアモーターは、高トルク、コンパクトなサイズ、低バックラッシュ、そして正確な動作制御を実現するため、ヒューマノイドロボットにおいて重要な役割を果たしています。これらは、肩、肘、手首、股関節、膝、足首、腰関節、首の機構などに広く採用されています。
ヒューマノイドロボットにおいて、関節の動きの質は、歩行の安定性、バランス、物体の把持、そして人間のような動作に直接影響します。ハーモニックギアモーターは、ロボットがより滑らかに、正確に、そして確実に動くことを可能にします。
ヒューマノイドロボットに高精度ギアモーターが必要な理由
ヒューマノイドロボットは、単純な産業用機械とは異なります。歩行、旋回、バランス保持、物体の持ち上げ、人間との対話、そして柔軟な動作を行う必要があります。これらの動作には、多数の関節が同時に連携して動作することが求められます。
例えば、ヒューマノイドロボットが歩行する際、股関節、膝関節、足首、腰、そして上半身が絶えず協調して動作しなければなりません。もし一つの関節にバックラッシュや遅延が大きすぎると、ロボットは揺れたり、バランスを崩したり、不自然な動きをしてしまう可能性があります。
その結果、関節モーターシステムには、以下の重要な性能要件を満たすことが求められます。
| 要件 | ヒューマノイドロボットにおいて重要な理由 |
| 高トルク | 体重の支持、歩行、持ち上げ、関節運動を支える |
| 低バックラッシュ | 動作精度と安定性の向上 |
| コンパクトなサイズ | スリムなロボットアーム、脚、関節内に収まる |
| 軽量 | ロボット全体の負荷とエネルギー消費を低減 |
| 滑らかな動作 | 動きをより自然で人間らしくします |
| 高再現性 | 繰り返し作業中の動作を安定させる |

ハーモニックギアモーターとは?
ハーモニックギアモーターとは、ハーモニック減速機を用いて減速とトルク増大を行うモーターシステムです。この減速機は、ウェーブジェネレーター、フレックススプライン、およびサーキュラースプラインで構成されています。
ウェーブジェネレータは、フレックススプラインを楕円形に変形させます。モーターが回転すると、フレックススプラインがサーキュラースプラインと噛み合います。2つのギアの歯数差が小さいため、出力速度は低下する一方で、出力トルクは増加します。
この構造により、ハーモニックギアモーターは極めて狭いスペースで高い減速比を実現できます。これは、関節のスペースが限られている一方で高いトルクが求められるヒューマノイドロボットにおいて特に有用です。
ヒューマノイドロボットにおけるハーモニックギアモーターの主な役割
コンパクトな関節での高トルク供給
ヒューマノイドロボットの関節は、小型でありながら強力な性能が求められます。ロボットのアーム、脚、あるいは腰の関節には、大型の産業用ギアボックスを使用することはできません。そうするとロボットが嵩張って重くなってしまうからです。
ハーモニックギアモーターは、高いトルク密度を実現することでこの問題を解決します。関節をコンパクトに保ちながら、強力な出力トルクを供給できます。これにより、ロボット設計者はよりスリムな腕、より軽量な脚、そしてより人間らしい体のプロポーションを実現できます。
例えば、肩関節には腕を持ち上げるのに十分なトルクが必要です。また、歩行や立ち姿勢を支えるためには、股関節や膝関節にはさらに高いトルクが求められます。ハーモニックギアモーターは、スペースをあまり占有することなく、これらのトルク要求を満たすのに役立ちます。
動作精度の向上
ヒューマノイドロボットには、多くの場合、精密な動きが求められます。ロボットが物体を持ち上げたり、手を振ったり、姿勢を調整したり、頭を回したりする際、関節は正確な位置で停止しなければなりません。
ハーモニックギアモーターはバックラッシュが非常に小さいため、位置決め誤差の低減に役立ちます。これは以下の用途において重要です:
- ロボットアーム
- 手や指
- 首の回転
- 腰の動き
- 歩行時のバランス
- 物体の把持・操作
バックラッシュが少ないため、ロボットはより正確に動き、同じ動作を何度も繰り返しても安定した結果が得られます。
滑らかで人間らしい動きの実現
ヒューマノイドロボットは、ぎこちない機械のような動きをしてはいけません。その動きは滑らかで、安定しており、制御されている必要があります。ハーモニックギアモーターは、ギアの噛み合わせが連続的かつコンパクトであるため、これを実現するのに役立ちます。
滑らかな動きは、サービスロボット、医療ロボット、研究用ロボット、およびインタラクティブなヒューマノイドロボットにとって重要です。ロボットが自然に動くことで、人々に安全で受け入れやすい印象を与えます。
例えば、ロボットが頭を回したり、腕を上げたり、膝を曲げたりする際、関節の動きが滑らかであれば、ユーザー体験全体が向上します。
ヒューマノイドロボットの関節における応用分野
ロボットの関節ごとに、求められる動作要件は異なります。高いトルクを必要とする関節もあれば、コンパクトな構造や精密な制御が求められる関節もあります。
| ロボットの関節領域 | ハーモニックギアモーターの機能 | 主な利点 |
| 肩関節 | アームの昇降および回転を制御 | 高トルクかつコンパクト |
| 肘関節 | 腕の屈曲動作をサポート | 滑らかで正確な動作 |
| 手首関節 | 手の位置を柔軟に調整可能 | バックラッシュが少なく高精度 |
| 股関節 | 歩行と体のバランスをサポート | 高い負荷容量 |
| 膝関節 | 股関節 | 高いトルク出力 |
| 足首関節 | バランスと歩行の安定性をサポート | 素早い反応と高い制御精度 |
| 腰関節 | 体の回転と姿勢の調整が可能 | 安定した回転運動 |
| 首の関節 | 頭部の動きを制御 | 滑らかで静かな動作 |
ハーモニックギアモーターがヒューマノイドロボットに適している理由
高い減速比
ヒューマノイドロボットには通常、高速モーターが使用されますが、ロボットの関節には、より低速で強力な動きが求められます。ハーモニック減速機は、1段で高い減速比を実現し、モーターの回転速度を関節で利用可能なトルクに変換します。
これにより、ロボットは制御不能な速度ではなく、力強く制御された動きを実現できます。
バックラッシュが小さい
バックラッシュは、関節の緩み、振動、位置決め精度の低下を引き起こす可能性があります。ヒューマノイドロボットでは、これが歩行のバランス、腕の制御、物体の把持に影響を及ぼす恐れがあります。
ハーモニックギアモーターはバックラッシュが少ないことで知られており、ロボットの安定性と精度の向上に寄与します。
コンパクトかつ軽量な設計
ヒューマノイドロボットの関節内部のスペースは限られています。ハーモニックギアモーターはコンパクトであるため、腕、脚、手首、足首への組み込みが容易です。
関節が軽量化されることで、他の関節への負荷も軽減されます。例えば、腕のモーターが軽量であれば、腕を持ち上げるために肩関節が必要とするトルクが少なくて済みます。
高トルク密度
トルク密度とは、モーターシステムのサイズや重量に対して、どれだけのトルクを発生させることができるかを示す指標です。ハーモニックギアモーターは高いトルク密度を実現しており、これはヒューマノイドロボットの設計において不可欠な要素です。
これにより、ロボットは大型のアクチュエータを使用することなく、より強力な動作を行うことが可能になります。
ハーモニックギアモーターと他のロボット関節ソリューションの比較
ヒューマノイドロボットには、遊星歯車モーター、サイクロイド減速機、ダイレクトドライブモーター、あるいはベルト伝動システムが使用されることもあります。しかし、精度とコンパクトさが最優先される場合、ハーモニックギアモーターが選ばれることがよくあります。
| 項目 | ハーモニックギアモーター | 遊星ギアモーター | ダイレクトドライブモーター |
| バックラッシュ | 極めて低い | 低~中 | バックラッシュなし |
| トルク密度 | 高 | 中~高 | モーターが大型でない限り低い |
| サイズ | 非常にコンパクト | コンパクト | 通常は大きい |
| 精度 | 極めて高い | 良好 | 非常に良い |
| 減速比 | 1段で高減速 | 高減速比には多段式が必要 | 減速なし |
| コスト | 中~高 | 中 | 高トルクの場合は高 |
| 最適な用途 | 高精度ロボット関節 | 汎用オートメーション用ジョイント | ハイエンドのトルク制御用関節 |
ハーモニックギアモーターがロボットの歩行にどのように役立つか
歩行はヒューマノイドロボットにとって最も困難な課題の一つです。ロボットは、脚を動かし、体重を移動させ、姿勢をリアルタイムで調整しながら、バランスを保たなければなりません。
ハーモニックギアモーターは、いくつかの点で歩行性能の向上に貢献します。
第一に、股関節、膝関節、足首関節に十分なトルクを供給します。これらの関節は、ロボット本体を支え、脚の動きを制御する必要があります。
第二に、バックラッシュが小さいため、関節の不要な動きを抑えることができます。これによりバランスが向上し、歩行がより安定します。
第三に、コンパクトな設計により脚部の重量が軽減されます。脚が軽くなれば、動かすのに必要なエネルギーが少なくなり、効率の向上につながります。
第四に、正確な位置決めが可能になるため、歩行制御が向上します。ロボットは足をより正確に配置し、姿勢をより滑らかに調整することができます。
ハーモニックギアモーターがロボットアームとハンドをどのように向上させるか
ロボットアームには、精度と柔軟性が求められます。ヒューマノイドロボットは、物体を持ち上げたり、工具を保持したり、ドアを開けたり、ボタンを押したり、握手したりする必要がある場合があります。
ハーモニックギアモーターは、滑らかで正確な動きを実現するため、アームの関節に有用です。これらは、ロボットが肩、肘、手首をより高い再現性で制御するのに役立ちます。
ロボットハンドの場合、指の動きを制御するために、小型のハーモニックギアモーターやマイクロ精密アクチュエータが使用されることがあります。すべての指の関節にハーモニックギアモーターが使用されるわけではありませんが、設計目標は同じです。すなわち、コンパクトなサイズ、正確な制御、そして信頼性の高いトルクです。
重要な選定要因
ヒューマノイドロボット用のハーモニックギアモーターを選定する際、エンジニアは定格トルク以外にも考慮すべき点があります。モーターはロボットシステム全体と適合していなければなりません。
トルクと負荷容量
モーターは、動作、荷重保持、加速度、および衝撃条件に対応できる十分なトルクを提供する必要があります。股関節、膝関節、足首関節は、通常、手首や首の関節よりも高いトルクを必要とします。
重量とサイズ
小型で軽量のモーターは、ロボット全体の重量を軽減するのに役立ちます。これは、長時間の稼働が求められる移動型ヒューマノイドロボットにとって特に重要です。
バックラッシュと位置決め精度
バックラッシュが小さいことは、歩行の安定性、物体の把持、および精密な姿勢制御にとって極めて重要です。
効率と熱管理
ヒューマノイドロボットは連続運転を行うことがあるため、モーターの過度な発熱は効率の低下、耐用年数の短縮、あるいは内部部品の損傷につながる可能性があります。
寿命
ハーモニック減速機内部のフレックススプラインは、弾性変形を利用して動作します。そのため、疲労寿命、材料の品質、潤滑、および負荷設計を慎重に検討する必要があります。
一般的な課題
ハーモニックギアモーターはヒューマノイドロボットに非常に適していますが、いくつかの制限もあります。
課題の一つはコストです。ハーモニックギアモーターは通常、単純なギアモーターよりも高価です。関節の多いロボットの場合、アクチュエータの総コストが高くなる可能性があります。
もう一つの課題は衝撃荷重です。落下、跳躍、または急激な動きによる突然の衝撃は、減速機の寿命に影響を与える可能性があります。エンジニアは、適切なトルクマージンと機械的な保護機能を設計する必要があります。
発熱も重要な課題です。コンパクトなロボットの関節には冷却スペースが限られている場合があるため、初期段階から熱設計を考慮する必要があります。
