Harmonic gear motors play an important role in humanoid robots because they provide high torque, compact size, low backlash, and accurate motion control. They are widely used in shoulders, elbows, wrists, hips, knees, ankles, waist joints, and neck mechanisms.
For humanoid robots, the quality of joint movement directly affects walking stability, balance, object handling, and human-like motion. Harmonic gear motors help robots move more smoothly, accurately, and reliably.
Why Humanoid Robots Need Precision Gear Motors
Humanoid robots are different from simple industrial machines. They must walk, turn, balance, lift objects, interact with people, and perform flexible movements. These actions require many joints working together at the same time.
For example, when a humanoid robot walks, the hip, knee, ankle, waist, and upper body must coordinate continuously. If one joint has too much backlash or delay, the robot may shake, lose balance, or move unnaturally.
As a result, the joint motor system needs to meet key performance requirements.
| Requirement | Why It Matters in Humanoid Robots |
| High torque | Supports body weight, walking, lifting, and joint movement |
| Low backlash | Improves motion accuracy and stability |
| Compact size | Fits inside slim robot arms, legs, and joints |
| Light weight | Reduces overall robot load and energy consumption |
| Smooth motion | Makes movement more natural and human-like |
| High repeatability | Ensures stable actions during repeated tasks |

What Is a Harmonic Gear Motor?
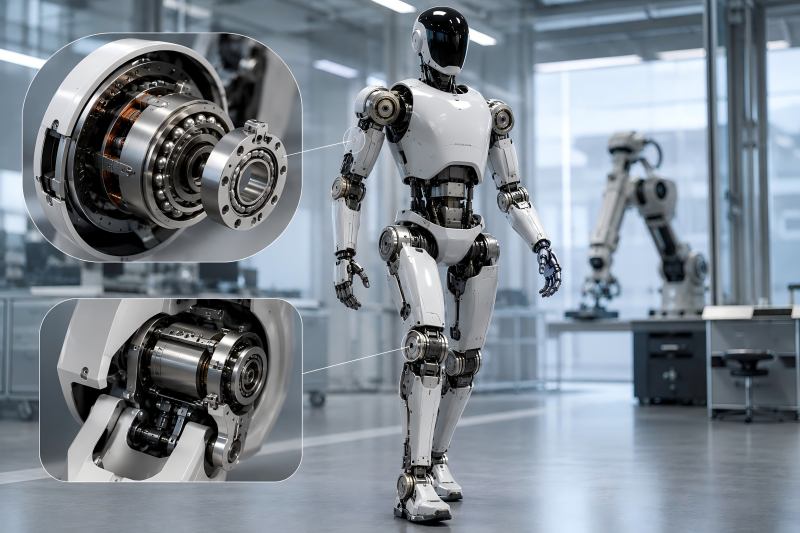
A harmonic gear motor is a motor system that uses a harmonic reducer to reduce speed and increase torque. The reducer consists of a wave generator, flex spline, and circular spline.
The wave generator reshapes the flex spline into an ellipse. As the motor rotates, the flex spline engages with the circular spline. Because the two gears have a small tooth difference, the output speed is reduced while the output torque increases.
This structure allows a harmonic gear motor to achieve a high reduction ratio in a very small space. It is especially useful for humanoid robots, where joint space is limited but torque demand is high.
Main Role of Harmonic Gear Motors in Humanoid Robots
Providing High Torque in Compact Joints
Humanoid robot joints must be small but powerful. A robot arm, leg, or waist joint cannot use a large industrial gearbox because it would make the robot bulky and heavy.
Harmonic gear motors solve this problem by offering high torque density. They can deliver strong output torque while keeping the joint compact. This helps robot designers build slimmer arms, lighter legs, and more human-like body proportions.
For example, the shoulder joint needs enough torque to lift the arm. The hip and knee joints need even higher torque to support walking and standing. Harmonic gear motors help meet these torque demands without taking up too much space.
Improving Motion Accuracy
Humanoid robots often need precise movement. When a robot picks up an object, waves its hand, adjusts posture, or turns its head, the joint must stop at the correct position.
Harmonic gear motors have very low backlash, which helps reduce positioning error. This is important for:
- Robot arms
- Hands and fingers
- Neck rotation
- Waist movement
- Walking balance
- Object manipulation
Low backlash allows the robot to move more accurately and repeat the same action many times with stable results.
Supporting Smooth and Human-Like Movement
A humanoid robot should not move like a rough machine. Its motion should be smooth, stable, and controlled. Harmonic gear motors help achieve this because their gear engagement is continuous and compact.
Smooth motion is important for service robots, medical robots, research robots, and interactive humanoid robots. When a robot moves naturally, it looks safer and more acceptable to people.
For example, when a robot turns its head, raises its arm, or bends its knee, smooth joint movement improves the overall user experience.
Application Areas in Humanoid Robot Joints
Different robot joints have different motion requirements. Some joints need high torque, while others require compact structure and precise control.
| Robot Joint Area | Function of Harmonic Gear Motor | Key Benefit |
| Shoulder Joint | Controls arm lifting and rotation | High torque and compact size |
| Elbow Joint | Supports arm bending movement | Smooth and accurate motion |
| Wrist Joint | Enables flexible hand positioning | Low backlash and precision |
| Hip Joint | Supports walking and body balance | High load capacity |
| Knee Joint | Controls leg bending and extension | Strong torque output |
| Ankle Joint | Helps balance and walking stability | Fast response and control accuracy |
| Waist Joint | Allows body turning and posture adjustment | Stable rotational movement |
| Neck Joint | Controls head movement | Smooth and quiet operation |
Why Harmonic Gear Motors Are Suitable for Humanoid Robots
High Reduction Ratio
Humanoid robots usually use high-speed motors, but robot joints require slower and stronger movement. A harmonic reducer can provide a high reduction ratio in one stage, converting motor speed into usable joint torque.
This helps the robot move with strength and control instead of uncontrolled speed.
Low Backlash
Backlash can cause joint looseness, shaking, and inaccurate positioning. In humanoid robots, this can affect walking balance, arm control, and object handling.
Harmonic gear motors are known for low backlash, which helps improve robot stability and precision.
Compact and Lightweight Design
Space is limited inside humanoid robot joints. Harmonic gear motors are compact, making them easier to integrate into arms, legs, wrists, and ankles.
A lighter joint also reduces the load on other joints. For example, if the arm motor is lighter, the shoulder joint needs less torque to lift the arm.
High Torque Density
Torque density means how much torque a motor system can provide compared with its size and weight. Harmonic gear motors provide high torque density, which is essential for humanoid robot design.
This allows robots to perform stronger movements without using oversized actuators.
Harmonic Gear Motor vs Other Robot Joint Solutions
Humanoid robots may also use planetary gear motors, cycloidal reducers, direct drive motors, or belt transmission systems. However, harmonic gear motors are often selected when precision and compactness are the main priorities.
| Item | Harmonic Gear Motor | Planetary Gear Motor | Direct Drive Motor |
| Backlash | Very low | Low to medium | No gearbox backlash |
| Torque Density | High | Medium to high | Lower unless motor is large |
| Size | Very compact | Compact | Usually larger |
| Precision | Excellent | Good | Excellent |
| Reduction Ratio | High in one stage | Requires multiple stages for high ratio | No reduction |
| Cost | Medium to high | Medium | High for high torque |
| Best Use | Precision robot joints | General automation joints | High-end torque control joints |
How Harmonic Gear Motors Help Robot Walking
Walking is one of the most difficult tasks for humanoid robots. The robot must keep balance while moving its legs, shifting weight, and adjusting posture in real time.
Harmonic gear motors help walking performance in several ways.
First, they provide enough torque for the hip, knee, and ankle joints. These joints must support the robot body and control leg movement.
Second, low backlash helps reduce unwanted joint movement. This improves balance and makes walking more stable.
Third, compact design reduces leg weight. Lighter legs require less energy to move, helping improve efficiency.
Fourth, precise positioning allows better gait control. The robot can place its foot more accurately and adjust its posture more smoothly.
How Harmonic Gear Motors Improve Robot Arms and Hands
Robot arms need accuracy and flexibility. A humanoid robot may need to pick up objects, hold tools, open doors, press buttons, or shake hands.
Harmonic gear motors are useful in arm joints because they provide smooth and accurate motion. They help the robot control the shoulder, elbow, and wrist with better repeatability.
For robot hands, smaller harmonic gear motors or micro precision actuators may be used to control finger movement. Although not every finger joint uses a harmonic gear motor, the same design goal remains: compact size, accurate control, and reliable torque.
Important Selection Factors
When choosing harmonic gear motors for humanoid robots, engineers need to consider more than rated torque. The motor must match the full robot system.
Torque and Load Capacity
The motor must provide enough torque for movement, load holding, acceleration, and impact conditions. Hip, knee, and ankle joints usually require higher torque than wrist or neck joints.
Weight and Size
A smaller and lighter motor helps reduce total robot weight. This is especially important for mobile humanoid robots that need long operating time.
Backlash and Positioning Accuracy
Low backlash is critical for walking stability, object handling, and precise posture control.
Efficiency and Heat Control
Humanoid robots may run continuously, so excessive motor heat can lower efficiency, shorten service life, or damage internal parts.
Service Life
The flex spline inside a harmonic reducer works through elastic deformation. Therefore, fatigue life, material quality, lubrication, and load design must be carefully considered.
Common Challenges
Although harmonic gear motors are highly suitable for humanoid robots, they also have some limitations.
One challenge is cost. Harmonic gear motors are usually more expensive than simple gear motors. For robots with many joints, total actuator cost can be high.
Another challenge is shock load. Sudden impacts from falling, jumping, or fast movement may affect reducer life. Engineers must design proper torque margins and mechanical protection.
Heat is also important. Compact robot joints may have limited cooling space, so thermal design must be considered from the beginning.
