Les moteurs à engrenages harmoniques jouent un rôle important dans les robots humanoïdes, car ils offrent un couple élevé, un format compact, un jeu réduit et un contrôle précis des mouvements. Ils sont largement utilisés dans les mécanismes des épaules, des coudes, des poignets, des hanches, des genoux, des chevilles, de la taille et du cou.
Pour les robots humanoïdes, la qualité des mouvements articulaires influe directement sur la stabilité de la marche, l’équilibre, la manipulation d’objets et les mouvements semblables à ceux des humains. Les moteurs à engrenages harmoniques aident les robots à se déplacer de manière plus fluide, plus précise et plus fiable.
Pourquoi les robots humanoïdes ont-ils besoin de moteurs à engrenages de précision ?
Les robots humanoïdes sont différents des simples machines industrielles. Ils doivent marcher, tourner, garder l’équilibre, soulever des objets, interagir avec les gens et effectuer des mouvements souples. Ces actions nécessitent que de nombreuses articulations fonctionnent ensemble en même temps.
Par exemple, lorsqu’un robot humanoïde marche, les hanches, les genoux, les chevilles, la taille et le haut du corps doivent se coordonner en permanence. Si une articulation présente un jeu ou un retard trop important, le robot peut trembler, perdre l’équilibre ou se déplacer de manière non naturelle.
Par conséquent, le système de moteurs d’articulation doit répondre à des exigences de performance clés.
| Exigence | Pourquoi est-ce important pour les robots humanoïdes |
| Couple élevé | Soutient le poids du corps, la marche, le levage et les mouvements articulaires |
| Faible jeu | Améliore la précision et la stabilité des mouvements |
| Taille compacte | S’intègre dans les bras, les jambes et les articulations de robots minces |
| Poids léger | Réduit la charge globale du robot et la consommation d’énergie |
| Mouvements fluides | Rend les mouvements plus naturels et plus proches de ceux d’un être humain |
| Haute répétabilité | Assure la stabilité des actions lors de tâches répétitives |

Qu’est-ce qu’un moteur à engrenages harmoniques ?
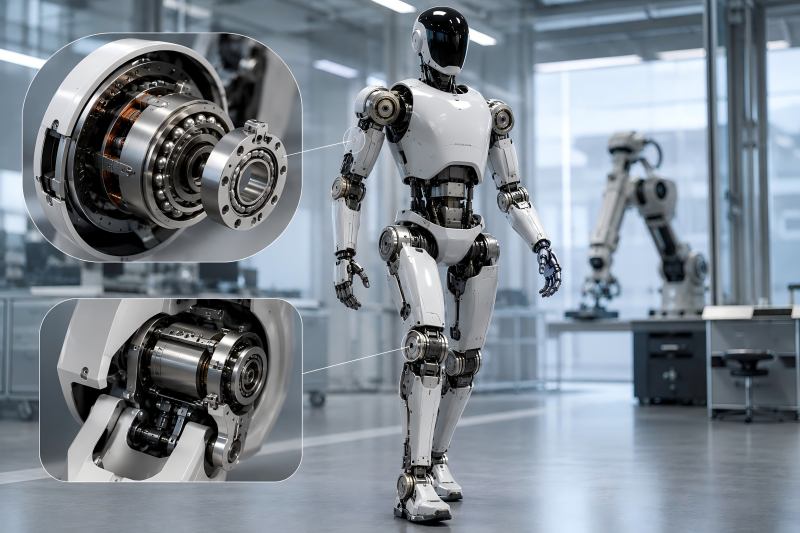
Un moteur à engrenages harmoniques est un système de moteur qui utilise un réducteur harmonique pour réduire la vitesse et augmenter le couple. Le réducteur se compose d’un générateur d’ondes, d’une cannelure flexible et d’une cannelure circulaire.
Le générateur d’ondes transforme la cannelure flexible en une ellipse. Lorsque le moteur tourne, la cannelure flexible s’engrène avec la cannelure circulaire. Comme les deux engrenages présentent un léger décalage entre leurs dents, la vitesse de sortie est réduite tandis que le couple de sortie augmente.
Cette structure permet à un moteur à engrenages harmoniques d’atteindre un rapport de réduction élevé dans un espace très réduit. Elle est particulièrement utile pour les robots humanoïdes, où l’espace au niveau des articulations est limité mais où la demande en couple est élevée.
Rôle principal des moteurs à engrenages harmoniques dans les robots humanoïdes
Fournir un couple élevé dans des articulations compactes
Les articulations des robots humanoïdes doivent être petites mais puissantes. Une articulation de bras, de jambe ou de taille ne peut pas utiliser un grand réducteur industriel, car cela rendrait le robot encombrant et lourd.
Les moteurs à engrenages harmoniques résolvent ce problème en offrant une densité de couple élevée. Ils peuvent fournir un couple de sortie puissant tout en conservant une articulation compacte. Cela aide les concepteurs de robots à construire des bras plus fins, des jambes plus légères et des proportions corporelles plus proches de celles des humains.
Par exemple, l’articulation de l’épaule a besoin d’un couple suffisant pour soulever le bras. Les articulations de la hanche et du genou ont besoin d’un couple encore plus élevé pour permettre la marche et la station debout. Les moteurs à engrenages harmoniques aident à répondre à ces exigences de couple sans prendre trop de place.
Amélioration de la précision des mouvements
Les robots humanoïdes ont souvent besoin de mouvements précis. Lorsqu’un robot saisit un objet, agite la main, ajuste sa posture ou tourne la tête, l’articulation doit s’arrêter à la position correcte.
Les moteurs à engrenages harmoniques présentent un jeu très faible, ce qui contribue à réduire les erreurs de positionnement. Ceci est important pour :
- Les bras robotiques
- Les mains et les doigts
- La rotation du cou
- Mouvement de la taille
- L’équilibre lors de la marche
- Manipulation d’objets
Un jeu réduit permet au robot de se déplacer avec plus de précision et de répéter la même action à plusieurs reprises avec des résultats stables.
Pour des mouvements fluides et semblables à ceux d’un humain
Un robot humanoïde ne doit pas se déplacer comme une machine grossière. Ses mouvements doivent être fluides, stables et contrôlés. Les moteurs à engrenages harmoniques contribuent à cet objectif, car leur engrènement est continu et compact.
La fluidité des mouvements est importante pour les robots de service, les robots médicaux, les robots de recherche et les robots humanoïdes interactifs. Lorsqu’un robot se déplace naturellement, il semble plus sûr et mieux accepté par les gens.
Par exemple, lorsqu’un robot tourne la tête, lève le bras ou plie le genou, la fluidité des mouvements articulaires améliore l’expérience utilisateur globale.
Domaines d’application dans les articulations des robots humanoïdes
Les différentes articulations de robot ont des exigences de mouvement différentes. Certaines articulations nécessitent un couple élevé, tandis que d’autres requièrent une structure compacte et un contrôle précis.
| Zone de l’articulation du robot | Fonction du moteur à engrenages harmoniques | Avantage principal |
| Articulation de l’épaule | Contrôle le levage et la rotation du bras | Couple élevé et taille compacte |
| Articulation du coude | Assure le mouvement de flexion du bras | Mouvement fluide et précis |
| Articulation du poignet | Permet un positionnement flexible de la main | Faible jeu et grande précision |
| Articulation de la hanche | Facilite la marche et l’équilibre corporel | Capacité de charge élevée |
| Articulation du genou | Contrôle la flexion et l’extension de la jambe | Couple de sortie élevé |
| Articulation de la cheville | Contribue à l’équilibre et à la stabilité de la marche | Réponse rapide et précision de contrôle |
| Articulation de la taille | Permet la rotation du corps et l’ajustement de la posture | Mouvement de rotation stable |
| Articulation du cou | Contrôle les mouvements de la tête | Fonctionnement fluide et silencieux |
Pourquoi les moteurs à engrenages harmoniques sont-ils adaptés aux robots humanoïdes
Rapport de réduction élevé
Les robots humanoïdes utilisent généralement des moteurs à grande vitesse, mais les articulations des robots nécessitent des mouvements plus lents et plus puissants. Un réducteur harmonique peut offrir un rapport de réduction élevé en une seule étape, convertissant la vitesse du moteur en couple utile pour l’articulation.
Cela permet au robot de se déplacer avec puissance et précision, plutôt qu’à une vitesse incontrôlée.
Faible jeu
Le jeu peut entraîner un relâchement des articulations, des vibrations et un positionnement imprécis. Chez les robots humanoïdes, cela peut affecter l’équilibre lors de la marche, le contrôle des bras et la manipulation d’objets.
Les moteurs à engrenages harmoniques sont connus pour leur faible jeu, ce qui contribue à améliorer la stabilité et la précision du robot.
Conception compacte et légère
L’espace est limité à l’intérieur des articulations des robots humanoïdes. Les moteurs à engrenages harmoniques sont compacts, ce qui facilite leur intégration dans les bras, les jambes, les poignets et les chevilles.
Une articulation plus légère réduit également la charge sur les autres articulations. Par exemple, si le moteur du bras est plus léger, l’articulation de l’épaule a besoin de moins de couple pour soulever le bras.
Haute densité de couple
La densité de couple désigne la quantité de couple qu’un système moteur peut fournir par rapport à sa taille et à son poids. Les moteurs à engrenages harmoniques offrent une densité de couple élevée, ce qui est essentiel pour la conception de robots humanoïdes.
Cela permet aux robots d’effectuer des mouvements plus puissants sans avoir recours à des actionneurs surdimensionnés.
Moteurs à engrenages harmoniques vs autres solutions pour les articulations robotiques
Les robots humanoïdes peuvent également utiliser des moteurs à engrenages planétaires, des réducteurs cycloïdaux, des moteurs à entraînement direct ou des systèmes de transmission par courroie. Cependant, les moteurs à engrenages harmoniques sont souvent choisis lorsque la précision et la compacité sont les principales priorités.
| Élément | Moteur à engrenages harmoniques | Moteur à engrenages planétaires | Moteur à entraînement direct |
| Jeu | Très faible | Faible à moyen | Pas de jeu dans la boîte de vitesses |
| Densité de couple | Élevée | Moyenne à élevée | Faible, sauf si le moteur est de grande taille |
| Taille | Très compact | Compact | Généralement plus grand |
| Précision | Excellente | Bonne | Excellent |
| Rapport de réduction | Élevé en une seule étape | Nécessite plusieurs étages pour un rapport élevé | Pas de réduction |
| Coût | Moyen à élevé | Moyen | Élevé pour un couple élevé |
| Utilisation optimale | Articulations de robots de précision | Articulations d’automatisation générale | Articulations haut de gamme à contrôle de couple |
Comment les moteurs à engrenages harmoniques facilitent la marche des robots
La marche est l’une des tâches les plus difficiles pour les robots humanoïdes. Le robot doit maintenir son équilibre tout en bougeant ses jambes, en transférant son poids et en ajustant sa posture en temps réel.
Les moteurs à engrenages harmoniques améliorent les performances de marche de plusieurs façons.
Premièrement, ils fournissent un couple suffisant pour les articulations de la hanche, du genou et de la cheville. Ces articulations doivent soutenir le corps du robot et contrôler les mouvements des jambes.
Deuxièmement, le faible jeu réduit les mouvements indésirables des articulations. Cela améliore l’équilibre et rend la marche plus stable.
Troisièmement, leur conception compacte réduit le poids des jambes. Des jambes plus légères nécessitent moins d’énergie pour se déplacer, ce qui contribue à améliorer l’efficacité.
Quatrièmement, le positionnement précis permet un meilleur contrôle de la démarche. Le robot peut poser son pied avec plus de précision et ajuster sa posture plus en douceur.
Comment les moteurs à engrenages harmoniques améliorent les bras et les mains des robots
Les bras robotiques ont besoin de précision et de flexibilité. Un robot humanoïde peut avoir besoin de saisir des objets, de tenir des outils, d’ouvrir des portes, d’appuyer sur des boutons ou de serrer la main.
Les moteurs à engrenages harmoniques sont utiles dans les articulations des bras car ils assurent un mouvement fluide et précis. Ils aident le robot à contrôler l’épaule, le coude et le poignet avec une meilleure répétabilité.
Pour les mains de robot, des moteurs à engrenages harmoniques plus petits ou des micro-actionneurs de précision peuvent être utilisés pour contrôler le mouvement des doigts. Bien que toutes les articulations des doigts n’utilisent pas un moteur à engrenages harmoniques, l’objectif de conception reste le même : taille compacte, contrôle précis et couple fiable.
Facteurs de sélection importants
Lors du choix de moteurs à engrenages harmoniques pour les robots humanoïdes, les ingénieurs doivent tenir compte d’autres éléments que le couple nominal. Le moteur doit être adapté à l’ensemble du système robotique.
Couple et capacité de charge
Le moteur doit fournir un couple suffisant pour le mouvement, le maintien de la charge, l’accélération et les conditions d’impact. Les articulations de la hanche, du genou et de la cheville nécessitent généralement un couple plus élevé que celles du poignet ou du cou.
Poids et taille
Un moteur plus petit et plus léger contribue à réduire le poids total du robot. Ceci est particulièrement important pour les robots humanoïdes mobiles qui nécessitent une longue autonomie.
Jeu et précision de positionnement
Un jeu réduit est essentiel pour la stabilité de la marche, la manipulation d’objets et le contrôle précis de la posture.
Rendement et gestion thermique
Les robots humanoïdes peuvent fonctionner en continu ; une chaleur excessive du moteur peut donc réduire le rendement, raccourcir la durée de vie ou endommager les composants internes.
Durée de vie
La cannelure flexible à l’intérieur d’un réducteur harmonique fonctionne par déformation élastique. Par conséquent, la résistance à la fatigue, la qualité des matériaux, la lubrification et la conception de la charge doivent être soigneusement prises en compte.
Défis courants
Bien que les moteurs à engrenages harmoniques soient parfaitement adaptés aux robots humanoïdes, ils présentent également certaines limites.
L’un des défis est le coût. Les moteurs à engrenages harmoniques sont généralement plus chers que les moteurs à engrenages simples. Pour les robots dotés de nombreuses articulations, le coût total des actionneurs peut être élevé.
Un autre défi est la charge de choc. Les impacts soudains dus à une chute, un saut ou un mouvement rapide peuvent affecter la durée de vie du réducteur. Les ingénieurs doivent concevoir des marges de couple appropriées et une protection mécanique.
La chaleur est également un facteur important. Les articulations compactes des robots peuvent disposer d’un espace de refroidissement limité ; la conception thermique doit donc être prise en compte dès le début.