Un motoréducteur est-il la même chose qu’un moteur à réducteur ?
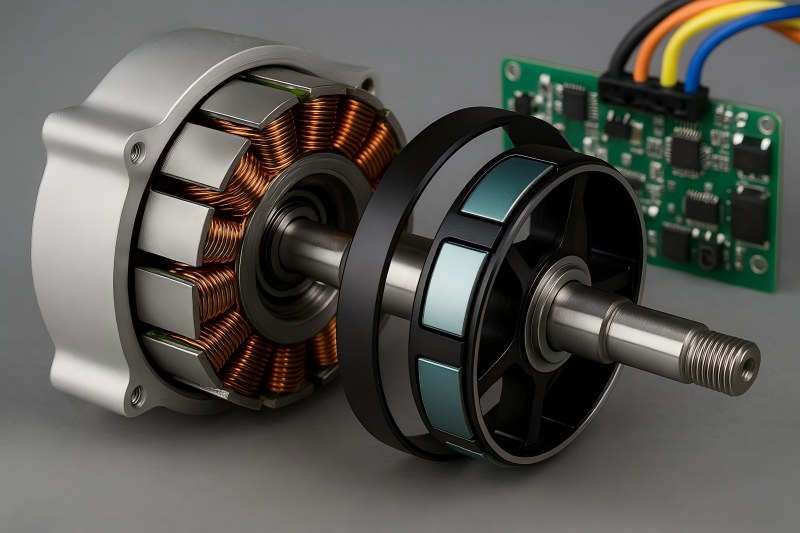
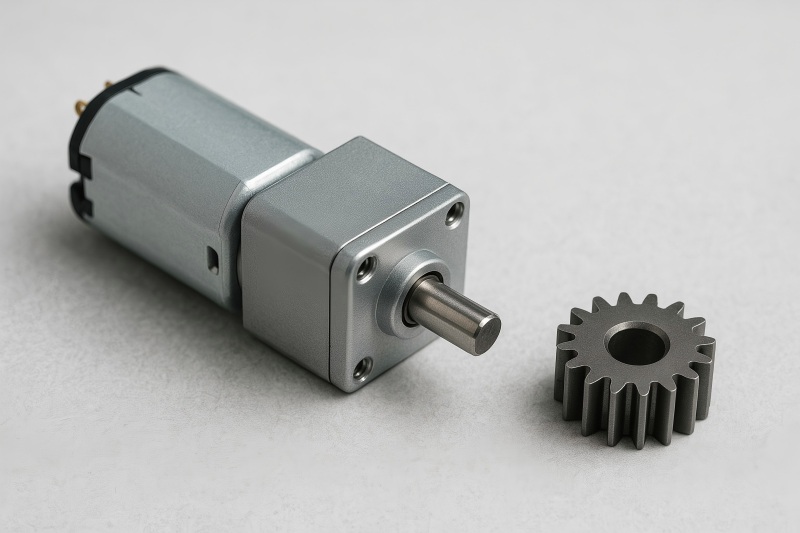
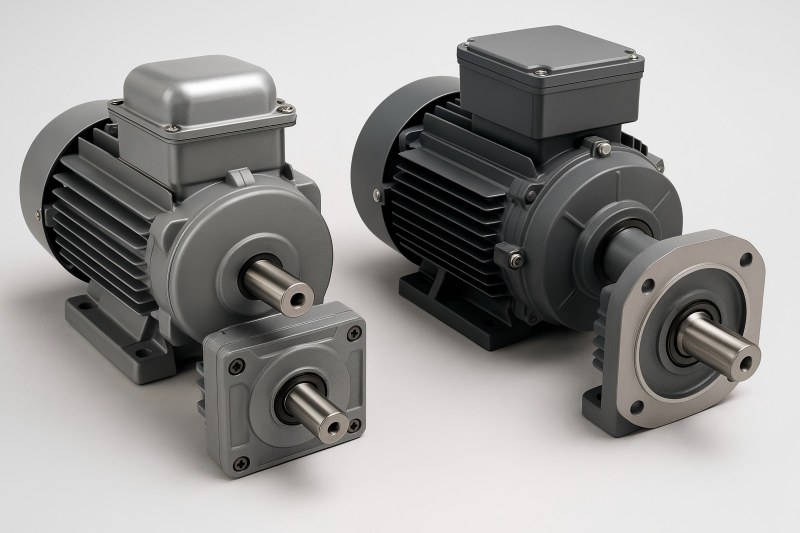
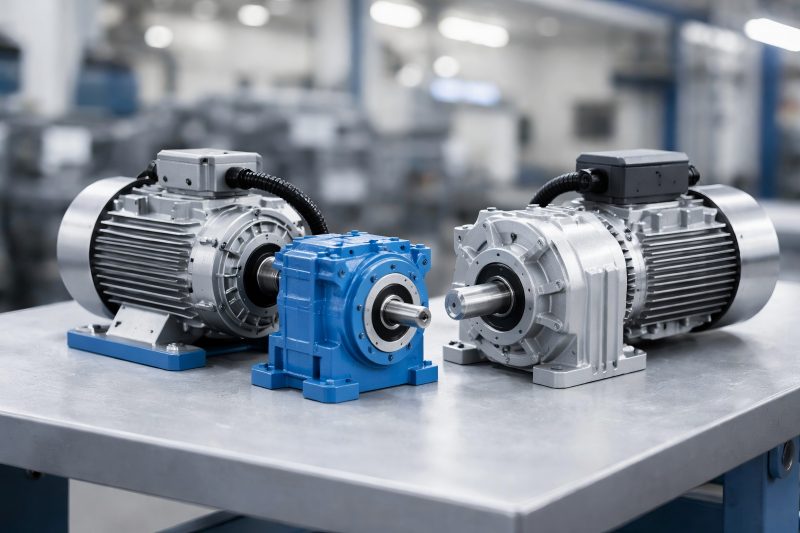
Dans les domaines de l’automatisation industrielle, de la robotique, de la manutention et des systèmes de transmission mécanique, les termes « motoréducteur » et « moteur à réducteur » sont souvent utilisés indifféremment. Dès lors, la question se pose : les motoréducteurs et les moteurs à réducteur sont-ils identiques ? En résumé, la réponse est non : ils sont étroitement liés, mais pas exactement identiques. Bien que les motoréducteurs et les moteurs à réduction de vitesse visent tous deux à diminuer la vitesse et à augmenter le couple, ils diffèrent par leur structure, leur niveau d’intégration, leur flexibilité, leur installation et leurs applications. Une mauvaise compréhension de ces différences peut entraîner un choix de moteur inapproprié, des coûts plus élevés, une efficacité réduite ou des difficultés de maintenance. Définitions de base Qu’est-ce qu’un moteur réduit ? Un moteur à vitesse réduite est un concept général, et non une catégorie de produits stricte. Il désigne tout système moteur dont la vitesse de sortie a été réduite par un mécanisme de réduction mécanique. Un moteur réduit se compose généralement de : Un moteur standard (CA, CC, BLDC ou pas à pas) Un dispositif de réduction de vitesse externe ou séparé, tel que : boîte de vitesse Courroie et poulie Chaîne et pignon Réducteur de vers Réducteur planétaire En termes simples : Si la vitesse d’un moteur est réduite avant d’entraîner la charge, on peut parler de système moteur réduit. Qu’est-ce qu’un motoréducteur ? UN motoréducteurest un produit spécifique et standardisé dans lequel : Le moteur et la boîte de vitesses sont combinés en une seule unité. Le réducteur est directement fixé à l’arbre moteur. La vitesse et le couple de sortie sont prédéfinis par le rapport de transmission interne. Autrement dit: Tout motoréducteur est un moteur réducteur, mais tout moteur réducteur n’est pas un motoréducteur. Relation fondamentale : même objectif, concept différent Les deux systèmes ont la même fonction mécanique : Réduire la vitesse de rotation Augmenter le couple de sortie Améliorer l’adaptation de la charge Activer le mouvement contrôlé La différence réside toutefois dans l’intégration et la flexibilité. Différence conceptuelle clé Aspect Moteur réduit motoréducteur Concept Terme général au niveau du système Produit moteur spécifique Structure Moteur + réducteur séparé Moteur + boîte de vitesses intégrée Standardisation Faible à moyen Haut Modularité Haut Faible Explication des différences structurelles Structure motrice réduite Un système moteur réduit est modulaire. Les ingénieurs peuvent sélectionner chaque composant indépendamment : Type de moteur (CA, CC, BLDC, servo) Type de réducteur (planétaire, à vis sans fin, hélicoïdal) Rapport de réduction Orientation de l’arbre Style de montage Exemples de configurations : moteur à courant alternatif + réducteur à courroie Servomoteur + réducteur planétaire Moteur BLDC + réducteur harmonique Cette flexibilité explique la popularité des moteurs de taille réduite dans les machines sur mesure et les systèmes haute performance. Structure du moteur à engrenages Un motoréducteur est une unité compacte préfabriquée : Cadre moteur fixe Boîte de vitesses intégrée Arbre aligné en usine Lubrification et étanchéité unifiées La conception privilégie : Facilité d’installation Fiabilité Optimisation de l’espace Contrôle des coûts Cela rend les motoréducteurs idéaux pour les équipements produits en série. Tableau comparatif fonctionnel Fonctionnalité Moteur réduit motoréducteur Réduction de vitesse Oui Oui Amplification du couple Oui Oui Conception intégrée Non (généralement) Oui Rapport de transmission personnalisé Grande flexibilité Limité au catalogue Entretien Niveau composant Niveau de l’unité Installation Plus complexe Simple Empreinte Plus grand Compact Différences de performance et d’efficacité Considérations relatives à l’efficacité Les motoréducteurs sont optimisés en tant que système, ce qui donne : Pertes de désalignement réduites Rendement stable aux charges nominales Les moteurs à puissance réduite peuvent atteindre : Rendement supérieur en cas d’adaptation correcte Mais l’efficacité varie en fonction de la qualité et de l’installation du réducteur. Densité de couple Les motoréducteurs offrent une densité de couple élevée par unité de volume Les moteurs à réduction peuvent offrir un couple absolu plus élevé lorsqu’ils utilisent des réducteurs de grande taille ou spécialisés. Personnalisation vs Commodité Moteur réduit : Avantage de l’ingénierie personnalisée Choisissez un système de motorisation réduit lorsque : Les exigences en matière de couple varient considérablement. Des rapports de transmission spéciaux sont nécessaires Une haute précision ou un contrôle du jeu est essentiel Il se peut que vous deviez remplacer le moteur ou la boîte de vitesses séparément. Secteurs d’activité communs : robots machines CNC Lignes d’automatisation équipement industriel lourd Motoréducteur : l’avantage du Plug-and-Play Choisissez un motoréducteur lorsque : L’espace est limité. La maîtrise des coûts est importante Le temps d’installation doit être minimal. Les exigences de performance sont bien définies Secteurs d’activité communs : Convoyeurs machines d’emballage transformation des aliments machines textiles Portes automatiques Tableau comparatif des coûts Facteur de coût Moteur réduit motoréducteur coût initial Moteur moins puissant, coût du système plus élevé Coût unitaire plus élevé Coût d’ingénierie Plus haut Inférieur Coût d’installation Plus haut Inférieur Coût d’entretien à long terme Plus élevé en cas de défaillance coût de remplacement Remplacement partiel possible remplacement de l’unité complète Maintenance et entretien Réduction de l’entretien du moteur Avantages Inconvénients Le moteur et le réducteur peuvent être entretenus séparément. Des vérifications d’alignement supplémentaires Des mises à niveau ou des remplacements plus faciles Plus de connexions mécaniques Cycle de vie plus long en milieu industriel Maintenance des motoréducteurs Avantages Inconvénients Moins de connexions externes Une panne de la boîte de vitesses peut nécessiter le remplacement de l’unité entière. entretien de routine réduit Moins de flexibilité pour les mises à niveau futures Les motoréducteurs sont-ils un type de moteur à réduction ? Oui, techniquement et fonctionnellement. D’un point de vue ingénierie : Un motoréducteur est un sous-ensemble des moteurs à réduction. Un moteur réduit est un concept de système plus large Analogie Voyez les choses ainsi : Moteur réduit = toute voiture avec une transmission Motoréducteur = une voiture compacte avec boîte de vitesses automatique intégrée Idées fausses courantes ❌ « Ils sont identiques. » C’est faux. L’un est un concept plus large, l’autre un produit spécifique. ❌ « Les moteurs à engrenages sont moins puissants. » Incorrect. Les motoréducteurs peuvent fournir un couple extrêmement élevé par rapport à