Problèmes courants liés au fonctionnement des moteurs BLDC et comment les résoudre.
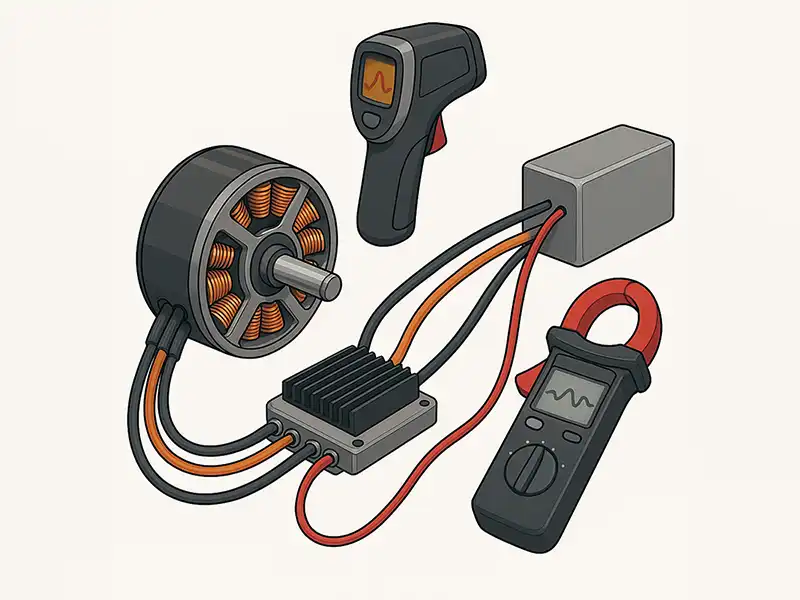
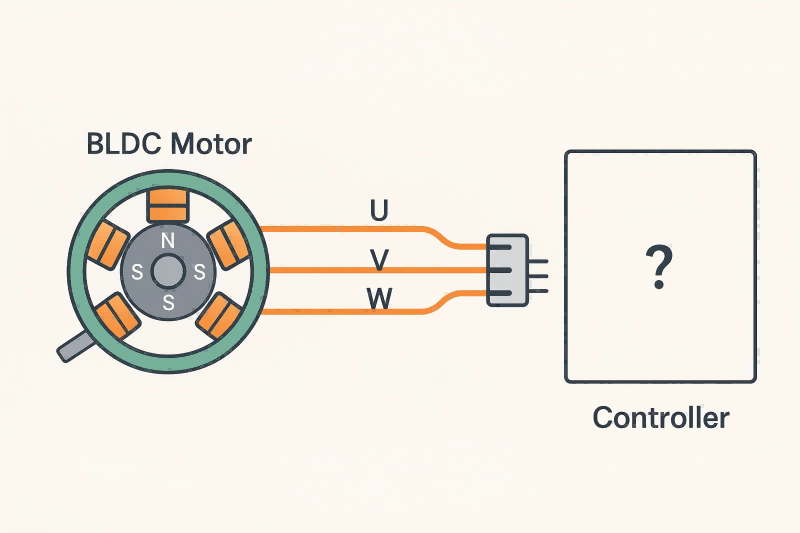
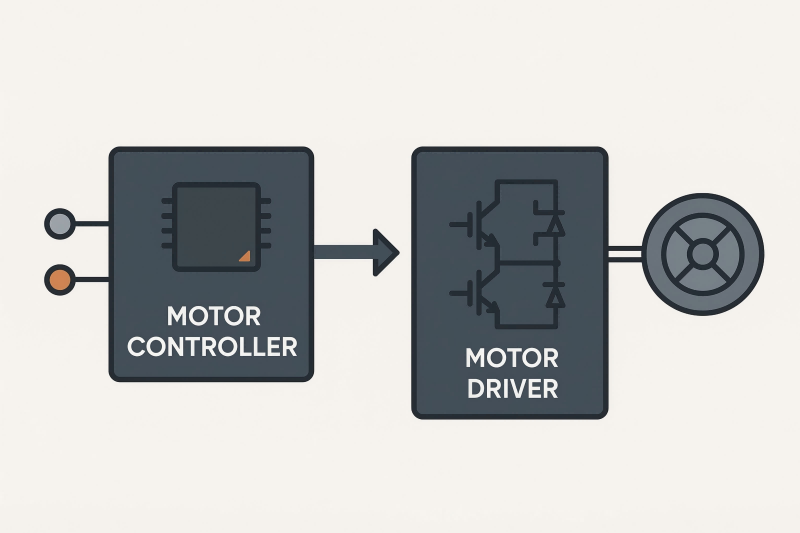
Contrairement aux moteurs à balais, les moteurs BLDC utilisent la commutation électronique, ce qui signifie que le courant est commuté par un contrôleur externe plutôt que par des balais mécaniques. Cependant, malgré leurs avantages, les moteurs BLDC ne sont pas à l’abri de problèmes de fonctionnement. Les ingénieurs et les techniciens rencontrent fréquemment des difficultés telles que des échecs de démarrage, des vibrations excessives, une surchauffe ou une instabilité de la vitesse. Comprendre ces problèmes et savoir les diagnostiquer et les corriger est essentiel pour garantir des performances fiables et durables. Comprendre le fonctionnement des moteurs BLDC Un moteur BLDC comprend principalement trois composants essentiels : Stator — avec des bobines de cuivre enroulées faisant office d’électroaimants. Rotor — contenant des aimants permanents qui tournent sous l’effet de la force électromagnétique. Contrôleur électronique — qui contrôle le temps de commutation via des capteurs à effet Hall ou la détection de la force contre-électromotrice. La commutation électronique permet aux moteurs BLDC d’atteindre un rendement supérieur et un niveau sonore réduit par rapport aux moteurs à courant continu à balais. Cependant, cette dépendance à une synchronisation et à une rétroaction précises implique également que toute variation des signaux des capteurs, du câblage ou de la logique de commande peut rapidement entraîner une dégradation des performances, voire une panne. Le moteur ne démarre pas. Causes courantes Problèmes d’alimentation électrique : une tension d’entrée insuffisante ou instable est l’une des causes les plus fréquentes d’échec au démarrage. Configuration incorrecte du contrôleur : si les paramètres de la broche d’activation, de l’entrée PWM ou de la séquence de démarrage sont mal configurés, le moteur risque de ne pas recevoir de commande valide. Capteurs à effet Hall ou lignes de signal défectueux : des capteurs endommagés ou de mauvaises connexions de câblage peuvent empêcher le contrôleur de détecter la position du rotor. Enroulement de phase ouvert ou en court-circuit : les défauts dans l’enroulement du stator entraînent un courant déséquilibré ou une absence de couple électromagnétique. Étapes de dépannage Vérifiez la source d’alimentation : mesurez la tension d’entrée sous charge à l’aide d’un multimètre pour vous assurer qu’elle correspond aux spécifications nominales. Vérifier la continuité du câblage : inspecter les fils de phase (U, V, W) pour détecter tout dommage et confirmer la polarité correcte. Examiner le signal du capteur à effet Hall : utiliser un oscilloscope pour vérifier les signaux carrés de sortie tout en faisant tourner manuellement le rotor. Vérifiez les paramètres du contrôleur : assurez-vous que les broches d’activation sont actives, que la fréquence PWM est compatible et que les fonctions de protection ne sont pas déclenchées par erreur. Mesure de la résistance de la bobine : comparer la résistance entre les phases ; un écart important indique une défaillance de l’enroulement. Le moteur tourne de façon irrégulière ou vibre Causes courantes Erreurs de séquence de phases : lorsque l’ordre des phases du moteur et du contrôleur est incorrect, la génération de couple devient instable. Synchronisation de commutation incorrecte : un déphasage incorrect (avance ou retard) entraîne des ondulations de couple et des vibrations. Déséquilibre mécanique : des aimants de rotor desserrés ou des arbres déséquilibrés peuvent induire des vibrations périodiques. Capteurs défectueux : des capteurs à effet Hall mal alignés ou présentant une dérive entraînent un retour d’information incohérent. Étapes de dépannage Vérifiez le câblage de phase : assurez-vous que l’ordre des phases (U-V-W) et la séquence du capteur Hall correspondent à la configuration attendue du contrôleur. Inspection du rotor et des roulements : Retirez le rotor et vérifiez l’absence de déséquilibre mécanique, de fissures ou d’espacement irrégulier des aimants. Vérifier l’alignement des capteurs : repositionner les capteurs à effet Hall de sorte que la transition de phase se produise à l’angle électrique approprié (généralement 60° ou 120°). Utilisez un logiciel de diagnostic : de nombreux contrôleurs fournissent des outils de surveillance des formes d’onde pour vérifier la synchronisation de la commutation. Surchauffe pendant le fonctionnement Causes courantes Surintensité ou surcharge : lorsque la charge mécanique dépasse le couple nominal, un courant excessif circule dans les enroulements, générant de la chaleur. Refroidissement insuffisant : l’accumulation de poussière ou une ventilation inadéquate limitent la dissipation de la chaleur. Inefficacité du contrôleur : une commutation PWM mal réglée peut entraîner une perte d’énergie dans les MOSFET. Température ambiante élevée : les sources de chaleur environnantes peuvent aggraver l’élévation de la température interne du moteur. Étapes de dépannage Mesure du courant de fonctionnement : comparer la consommation de courant réelle à la valeur nominale à l’aide d’une pince ampèremétrique ; une surintensité suggère une surcharge mécanique ou une erreur de contrôle. Améliorer le refroidissement : assurez une circulation d’air dégagée, nettoyez les aérations ou installez un système de refroidissement forcé tel qu’un ventilateur ou une chemise de refroidissement liquide. Vérifiez les paramètres PWM : contrôlez la modulation du rapport cyclique et la fréquence de commutation ; optimisez pour minimiser les pertes de commutation. Vérifiez les roulements : le frottement des roulements usés augmente la production de chaleur même sous une charge électrique normale. Utiliser des capteurs thermiques : Mettre en œuvre une surveillance de la température avec des seuils d’arrêt automatique (par exemple, 120 °C pour les enroulements du stator). Bruit ou vibration anormaux Causes courantes Dégradation des roulements : Avec le temps, la lubrification des roulements se dégrade ou des contaminants pénètrent dans les chemins de roulement. Excentricité du rotor : Un entrefer irrégulier entre le rotor et le stator provoque un déséquilibre magnétique. Bruit magnétique : résultant d’une aimantation asymétrique ou d’une démagnétisation partielle. Résonance avec la structure de montage : les vibrations peuvent s’amplifier à des fréquences spécifiques. Étapes de dépannage Contrôlez les roulements : faites tourner l’arbre à la main ; toute rugosité ou grincement indique une usure des roulements. Remplacez-les si nécessaire. Vérifier l’alignement mécanique : mesurer l’uniformité de l’entrefer à l’aide d’une jauge d’épaisseur. Analyser les spectres de vibration : utiliser un analyseur de vibrations pour identifier la fréquence dominante et la relier à des sources mécaniques ou électriques. Ajouter des matériaux d’amortissement : des supports en caoutchouc ou des coussinets d’isolation aident à absorber la résonance structurelle. Veillez à un assemblage précis : un mauvais alignement entre le carter du moteur et l’arbre