Influence des paramètres du moteur sur la fonction de transfert des servomoteurs à courant continu
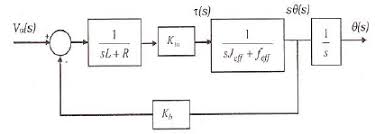
La fonction de transfert d’un servomoteur à courant continu représente la relation entre l’entrée du moteur (généralement la tension ou le courant) et sa sortie (généralement la vitesse ou la position) dans le domaine fréquentiel. Ce modèle mathématique est essentiel pour la conception de systèmes de contrôle qui régissent le comportement du moteur dans diverses applications, telles que la robotique, les machines CNC et les systèmes automobiles. La précision de la fonction de transfert est influencée par plusieurs paramètres du moteur, notamment la résistance (R), l’inductance (L) et le frottement (b), qui affectent la dynamique de la réponse du moteur aux entrées. Comprendre la fonction de transfert d’un servomoteur à courant continu Avant de se plonger dans l’influence de paramètres spécifiques, il est important de comprendre la structure de base de la fonction de transfert d’un servomoteur à courant continu. Un moteur à courant continu typique se compose de : Résistance d’armature (R) : la résistance des enroulements du moteur. Inductance d’armature (L) : l’inductance de l’enroulement d’armature. Force contre-électromotrice (FEM) : Tension générée par la rotation du moteur, s’opposant à la tension d’entrée. Inertie du moteur (J) : Résistance du moteur aux variations de vitesse de rotation. Amortissement (b) : Forces de frottement s’opposant à la rotation du moteur. Constante de couple (K_T) : Constante de proportionnalité entre le courant d’entrée et le couple de sortie du moteur. Constante de FEM (K_E) : Constante de proportionnalité entre la vitesse du moteur et la FEM générée. La fonction de transfert d’un moteur à courant continu peut s’écrire comme suit : où : ω(s)\omega(s)ω(s) est la vitesse angulaire du moteur (sortie), V(s)V(s)V(s) est la tension d’entrée, sss est la variable de fréquence complexe dans le domaine de Laplace. Effet de la résistance (R) sur la fonction de transfert La résistance dans l’enroulement d’induit joue un rôle important dans la détermination de la constante de temps électrique du moteur, qui a un impact à la fois sur le comportement transitoire et stable du moteur. La valeur de résistance affecte directement l’amortissement du système moteur et est intégrée au dénominateur de la fonction de transfert. Plus précisément, la résistance influence les aspects suivants du comportement du moteur : Réponse à la vitesse : une résistance plus élevée entraîne des pertes d’énergie plus importantes dans les enroulements, ce qui entraîne une accélération plus lente et un moteur moins réactif. L’augmentation de la résistance peut entraîner un sous-amortissement du système, avec des temps de stabilisation plus lents. Consommation d’énergie : une résistance accrue entraîne une dissipation d’énergie plus importante sous forme de chaleur, ce qui réduit l’efficacité du moteur et augmente la charge thermique du système. Stabilité : la résistance est un paramètre crucial pour contrôler le taux d’amortissement du moteur. Une résistance plus élevée augmente généralement l’amortissement, améliorant la stabilité mais réduisant éventuellement les performances dans les applications à grande vitesse. En termes de fonction de transfert, la résistance affecte l’emplacement des pôles dans le système. À mesure que la résistance augmente, le facteur d’amortissement devient plus important, décalant les pôles vers la moitié gauche du plan complexe, ce qui conduit à un système plus stable mais plus lent. Effet de l’inductance (L) sur la fonction de transfert L’inductance dans l’enroulement d’induit régit la constante de temps électrique du moteur, qui est déterminée par la relation entre l’inductance (L) et la résistance (R). L’inductance a plusieurs effets importants sur la fonction de transfert et la dynamique du moteur : Réponse transitoire : une inductance élevée ralentit la réponse du système aux changements d’entrée, car le courant met plus de temps à changer en raison de l’opposition créée par l’inductance. Cela signifie que le moteur aura une réponse transitoire plus lente, ce qui pourrait être problématique dans les applications hautes performances nécessitant une accélération rapide. Dépassement et temps de stabilisation : dans les systèmes à inductance élevée, la réponse du moteur peut présenter un temps de montée plus long et un dépassement plus important avant d’atteindre l’état stable. Cela est dû au fait que l’inductance résiste aux changements de courant, retardant l’accélération et la décélération du moteur. Erreur en régime permanent : l’inductance peut contribuer à une erreur en régime permanent si le système est mal réglé, en particulier dans les systèmes où le contrôle de la vitesse ou de la position est essentiel. Du point de vue du système de contrôle, l’inductance modifie les pôles du système, les amenant à se rapprocher de l’axe imaginaire. Cela peut entraîner une réponse plus lente et, dans certains cas, provoquer une oscillation du système s’il n’est pas correctement amorti. Dans la fonction de transfert, l’inductance apparaît sous la forme d’un terme LLL au numérateur et au dénominateur. Ce terme affecte considérablement la constante de temps du système et peut altérer la capacité du moteur à suivre les changements rapides du signal d’entrée. La fonction de transfert et le frottement (b) Le frottement est un paramètre souvent négligé mais essentiel dans les moteurs à courant continu. Il représente la résistance mécanique s’opposant au mouvement du rotor du moteur et comprend le frottement des roulements, la résistance de l’air et toute autre forme de pertes mécaniques. Le frottement affecte principalement les termes d’amortissement et d’inertie du moteur, et son influence se manifeste de la manière suivante : Amortissement du système : le frottement s’ajoute à l’amortissement global du système moteur, augmentant la vitesse à laquelle le moteur atteint sa position ou vitesse finale. Dans de nombreux cas, l’augmentation du frottement peut améliorer la stabilité du système en réduisant les oscillations ou le dépassement. Perte de couple : le frottement introduit un couple constant s’opposant à la rotation du moteur, ce qui réduit l’efficacité globale du système. Cette perte de couple peut avoir un impact sur la capacité du moteur à maintenir des vitesses élevées ou un positionnement précis au fil du temps. Contrôle de position : dans les applications à contrôle de position, le frottement peut introduire une erreur statique ou un décalage, car le moteur doit surmonter les forces de frottement pour atteindre et maintenir une position définie. Dans la