Comprensión de los sistemas de engranajes planetarios: una guía completa
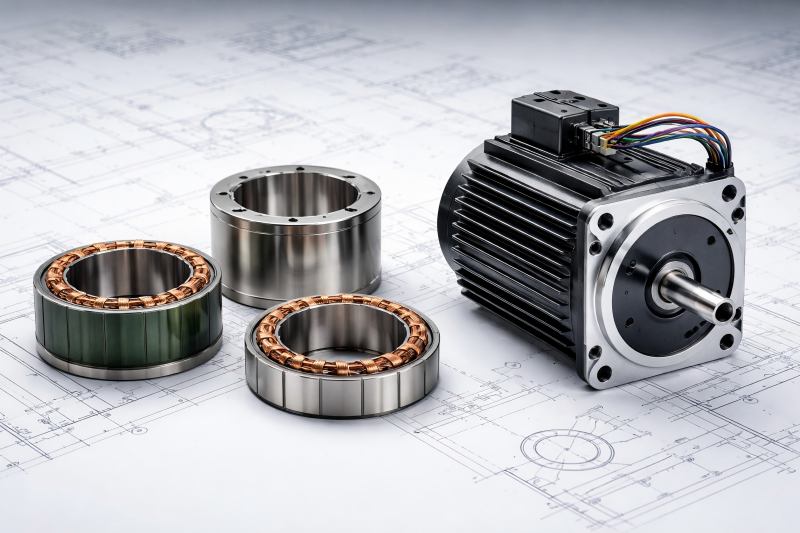
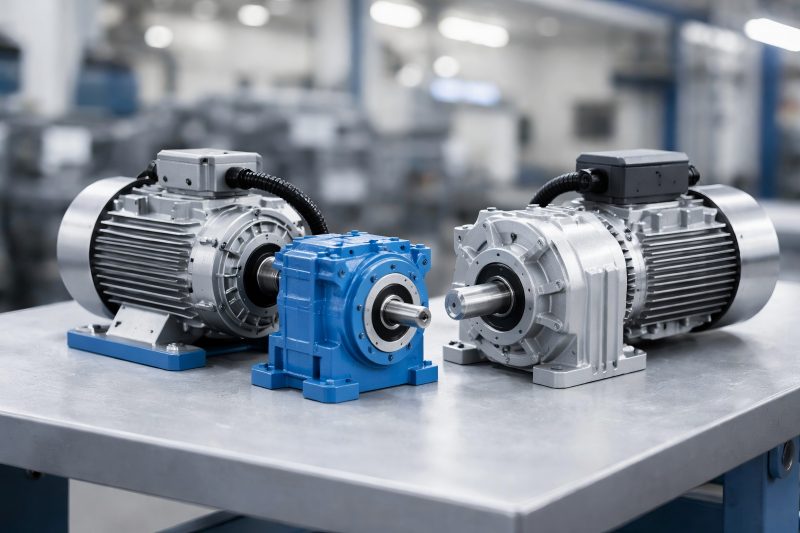
Desde transmisiones automotrices hasta robótica, sistemas aeroespaciales y maquinaria industrial, estos sistemas de engranajes ofrecen un alto par motor, una excelente distribución de la carga y una durabilidad notable en un tamaño relativamente reducido. Qué es un sistema de engranajes planetarios? A motorreductor planetarioUtiliza múltiples engranajes que giran alrededor de un engranaje central, lo que permite un diseño compacto y una alta producción de par motor. A diferencia de los sistemas de engranajes tradicionales, donde los engranajes suelen estar dispuestos en paralelo o en serie, los sistemas de engranajes planetarios utilizan una disposición coaxial. En su esencia, un sistema de engranajes planetarios tiene tres elementos fundamentales: un engranaje de transmisión central denominado engranaje solar varios engranajes que orbitan a su alrededor, conocidos como engranajes planetarios Un engranaje exterior con dientes internos, llamado corona dentada. Estos elementos funcionan conjuntamente mediante un soporte giratorio que sostiene y posiciona los engranajes planetarios. Dependiendo de qué componente esté fijo, accionado o se utilice como salida, el sistema puede generar diferentes relaciones de velocidad y par. Componentes clave de un sistema de engranajes planetarios Cada componente es vital para el funcionamiento general, permitiendo una transmisión de potencia fluida y eficiente. Sun Gear El engranaje solar transfiere la energía rotacional a los engranajes planetarios circundantes. Su tamaño y número de dientes influyen directamente en la relación de transmisión y el rendimiento. Engranajes planetarios Se utilizan varios engranajes planetarios para distribuir la carga de manera uniforme, lo que mejora la durabilidad y reduce el desgaste. Engranaje anular La corona dentada rodea todo el sistema y contiene dientes internos. Engrana con los engranajes planetarios y suele funcionar como componente fijo o como elemento de salida. Transportador planetario El soporte sujeta y posiciona los engranajes planetarios, funcionando como entrada o salida según la configuración. Cómo funcionan los sistemas de engranajes planetarios Los sistemas de engranajes planetarios funcionan mediante el movimiento relativo de los componentes, lo que permite obtener diferentes resultados al fijar una pieza e impulsar otra. Con el anillo fijo, el sol impulsa un portador más lento y de alto par; con el portador fijo, el anillo gira más rápido. Esta adaptabilidad permite que los sistemas de engranajes planetarios ofrezcan múltiples relaciones de transmisión sin alterar la estructura central. Tipos de configuraciones de engranajes planetarios Sistema de engranajes planetarios simple Esta es la configuración más sencilla, que consta de un único engranaje solar, una corona dentada y un conjunto de engranajes planetarios, y que se suele aplicar en sistemas con requisitos de par motor bajos o medios. Sistema de engranajes planetarios compuestos Los sistemas compuestos incluyen varios conjuntos de engranajes planetarios o etapas de engranajes adicionales. Se utilizan cuando se requieren relaciones de transmisión más altas o un mayor par motor. Sistema de engranajes planetarios multietapa Al combinar varios conjuntos de engranajes planetarios en serie, los sistemas multietapa pueden lograr relaciones de reducción extremadamente altas manteniendo unas dimensiones compactas. Sistema de engranajes planetarios diferenciales Estos sistemas permiten obtener diferentes salidas a partir de una sola entrada, y se utilizan comúnmente en los diferenciales de los automóviles para que las ruedas giren a diferentes velocidades. Ventajas de los sistemas de engranajes planetarios Los sistemas de engranajes planetarios ofrecen numerosas ventajas que los hacen superiores a muchos sistemas de engranajes tradicionales en aplicaciones exigentes. Alta densidad de par Ofrece un par motor elevado en un tamaño compacto. La carga se distribuye entre varios engranajes planetarios, lo que permite que el sistema gestione cargas pesadas de forma eficiente. Diseño compacto Debido a que todos los componentes están alineados en un solo eje, los sistemas de engranajes planetarios requieren menos espacio que las cajas de engranajes convencionales. Ideales para aplicaciones con espacio limitado. Alta eficiencia La distribución de la carga entre varios engranajes reduce la fricción y la pérdida de energía. Como resultado, los sistemas de engranajes planetarios suelen alcanzar altos niveles de eficiencia. Versatilidad Es posible lograr diferentes configuraciones sin cambios estructurales significativos, lo que hace que los sistemas de engranajes planetarios sean altamente adaptables. Desventajas y limitaciones Diseño complejo La estructura es más compleja que la de los sistemas de engranajes tradicionales, lo que requiere una ingeniería y una fabricación precisas. Costo más elevado Debido a la complejidad y precisión requeridas, los sistemas de engranajes planetarios suelen ser más caros de producir. Dificultad de mantenimiento El mantenimiento y la reparación de estos sistemas pueden resultar más complicados debido a su diseño compacto e integrado. Gestión del calor Una alta densidad de potencia puede generar mayor calor, lo que requiere sistemas adecuados de lubricación y refrigeración. Comparación con los sistemas de engranajes tradicionales Para comprender mejor el valor de los sistemas de engranajes planetarios, resulta útil compararlos con los sistemas de engranajes convencionales. Sistema de engranajes planetarios frente a sistema de engranajes tradicionales Característica Sistema de engranajes planetarios Sistema de engranajes tradicional Estructura de diseño Coaxial, compacto Disposición en paralelo o en serie Distribución de carga Compartido entre varias marchas Concentrado en menos marchas Capacidad de torsión Alto Moderado Eficiencia Alto Moderado Tamaño Compacto Más grande Complejidad Alto Bajo Costo Más alto Más bajo De esta comparación se desprende claramente que los sistemas de engranajes planetarios destacan por su rendimiento y compacidad, aunque requieren un diseño más avanzado y una mayor inversión. Consideraciones de diseño Requisitos de relación de transmisión En la mayoría de las cajas de engranajes planetarios industriales, las relaciones de reducción de una sola etapa suelen oscilar entre 3:1 y 10:1, mientras que los sistemas multietapa pueden alcanzar relaciones superiores a 100:1. Las relaciones de transmisión más altas aumentan el par motor, pero reducen ligeramente la eficiencia. Por ejemplo, un sistema de una sola etapa puede alcanzar una eficiencia del 97 %, mientras que un sistema de tres etapas puede bajar a alrededor del 90-94 %, dependiendo de la calidad y la lubricación. Selección de materiales La elección del material influye directamente en la resistencia, la resistencia al desgaste y la vida útil. Entre los materiales comunes se incluyen aceros aleados endurecidos como el 20CrMnTi o