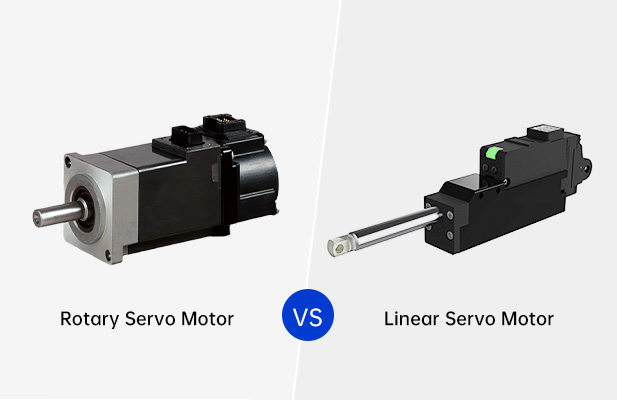
Servomotor rotatorio vs. servomotor lineal: una comparación completa
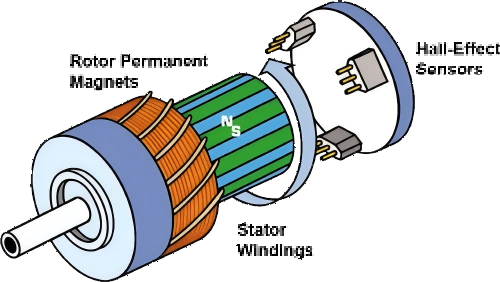
Los servomotores vienen en muchas formas, siendo los microservos rotatorios y lineales dos de los tipos más comunes. Si bien ambos cumplen funciones similares en términos de control de movimiento, difieren significativamente en diseño, rendimiento y aplicaciones. Comprender las diferencias entre los servomotores rotatorios y los microservos lineales puede ayudar a los ingenieros, diseñadores y aficionados a tomar decisiones informadas al elegir el motor adecuado para sus proyectos. Este artículo explora las características, ventajas, desventajas y casos de uso específicos de los servomotores rotatorios y los microservos lineales, ofreciendo una comparación detallada que guiará su proceso de selección. Junto con esto, destacaremos las diferencias de costo, los factores de rendimiento y algunos ejemplos prácticos para ayudarlo a tomar una decisión informada. Introducción a los servomotores La principal diferencia entre los servomotores y los motores estándar es la adición de un dispositivo de retroalimentación, como un codificador o resolver, que ayuda a lograr un control de bucle cerrado. Esta retroalimentación garantiza que el motor funcione exactamente como se requiere, ofreciendo alta precisión en tareas de control de movimiento. Los servomotores se dividen en dos grupos principales según el movimiento de su salida: Servomotores rotativos: estos motores giran alrededor de un eje, lo que generalmente proporciona un movimiento rotatorio. Microservomotores lineales: estos motores están diseñados para producir un movimiento lineal (en línea recta) en lugar de un movimiento rotatorio. Servomotores rotativos Un motor eléctrico que gira sobre un solo eje se denomina servomotor rotativo. Las aplicaciones que requieren movimiento rotatorio lo emplean con frecuencia. Los servomotores de CA y CC son las variedades más utilizadas de servomotores rotativos. Componentes clave de un servomotor rotativo Motor (CA/CC): el componente principal que genera el movimiento rotatorio. Dispositivo de retroalimentación (codificador o resolver): proporciona retroalimentación al controlador para ajustar la posición del motor. Controlador/controlador: la unidad electrónica que controla la velocidad, la posición y la dirección del motor. Ventajas de los servomotores rotativos Alta precisión y control: los servomotores rotativos ofrecen un alto par y precisión de velocidad, lo que los hace ideales para aplicaciones donde el movimiento rotativo preciso es fundamental. Amplia gama de aplicaciones: estos motores se utilizan en robótica, máquinas CNC, automatización industrial, sistemas de transporte y aplicaciones aeroespaciales. Alta eficiencia: los servomotores rotativos generalmente ofrecen una alta eficiencia, especialmente en aplicaciones que requieren rotación continua. Variedad de tamaños y capacidades: los servomotores rotativos están disponibles en una amplia gama de tamaños, lo que los hace adecuados tanto para aplicaciones de pequeña como de gran escala. Desventajas de los servomotores rotativos Limitados al movimiento rotativo: si bien son excelentes para tareas que requieren movimiento rotativo, los servomotores rotativos no pueden proporcionar un movimiento lineal sin componentes adicionales como tornillos de avance o cajas de engranajes. Mayor costo: los servomotores rotativos de alta precisión, especialmente aquellos con codificadores o sistemas de control especializados, pueden ser costosos en comparación con los motores estándar. Aplicaciones comunes de los servomotores rotativos: Robótica: para el control preciso del movimiento de los brazos robóticos. Máquinas CNC: Para posicionamiento preciso en procesos de fabricación. Puertas y ventanas automatizadas: Para movimiento rotatorio en diversos sistemas de automatización. Drones y aeronaves: Para control de superficies de vuelo. Servomotores lineales Un tipo de servomotor que genera movimiento lineal, a diferencia del movimiento rotatorio, es un microservomotor lineal. Estos motores suelen ser más pequeños y proporcionan un desplazamiento lineal preciso y controlado. En aplicaciones que requieren un movimiento lineal pequeño y preciso, se utilizan con frecuencia microservos lineales. Componentes clave de un servomotor lineal Motor y caja de cambios: el motor impulsa el actuador lineal a través de una caja de cambios o un tornillo de avance. Dispositivo de retroalimentación: al igual que los servomotores rotativos, los microservos lineales suelen contar con dispositivos de retroalimentación como potenciómetros o codificadores. Controlador/controlador: de manera similar a los servomotores rotativos, el controlador regula el movimiento lineal en función de la retroalimentación. Ventajas de los servomotores lineales Movimiento lineal: ideal para aplicaciones que requieren movimiento en línea recta, como en actuadores pequeños, guías lineales o control de válvulas. Tamaño compacto: los microservos lineales suelen ser más pequeños que sus contrapartes rotativas, lo que los hace adecuados para espacios reducidos o dispositivos más pequeños. Control de precisión: ofrece una precisión excelente en movimientos pequeños, lo que resulta especialmente útil en tareas delicadas, como ajustar el enfoque en cámaras o controlar brazos robóticos pequeños. Facilidad de integración: los microservomotores lineales son relativamente fáciles de integrar en diseños que necesitan un movimiento en línea recta sin piezas mecánicas adicionales como tornillos de avance o rieles. Desventajas de los servomotores lineales Fuerza y longitud de carrera limitadas: en comparación con los motores rotativos, los servomotores lineales suelen tener una longitud de carrera limitada y es posible que no proporcionen tanta fuerza en distancias largas. Menor eficiencia: los microservomotores lineales pueden ser menos eficientes que los motores rotativos en ciertas aplicaciones, especialmente cuando se requiere alta potencia o longitudes de carrera largas. Aplicaciones comunes de los servomotores lineales Robótica pequeña: se utiliza en actuadores robóticos pequeños para el movimiento lineal. Sistemas de cámara: para controlar el enfoque o el zoom de la lente en las cámaras. Creación de prototipos: se utiliza en prototipos o modelos que requieren un desplazamiento lineal preciso. Dispositivos médicos: se emplean en equipos médicos que requieren movimientos lineales pequeños y precisos, como en los sistemas de administración de medicamentos. Diferencias clave entre servomotores rotativos y servomotores lineales Característica Motor Servo Rotatorio Motor Servo Lineal Tipo de movimiento Movimiento rotatorio alrededor de un eje. Movimiento lineal (en línea recta). Aplicaciones Robótica, CNC, sistemas de cintas transportadoras. Robótica pequeña, sistemas de cámaras, actuadores. Tamaño Varía de tamaños pequeños a grandes. Generalmente más pequeño y compacto. Fuerza Alto par motor y potencia. Longitud de carrera y fuerza limitadas. Costo Más alto para modelos de alta precisión. Generalmente más asequible. Eficiencia Generalmente alta, dependiendo de la aplicación. Puede ser menos eficiente que los motores rotatorios en algunas aplicaciones. Precisión Alta precisión, ideal para tareas rotacionales. Alta precisión para tareas lineales pequeñas.