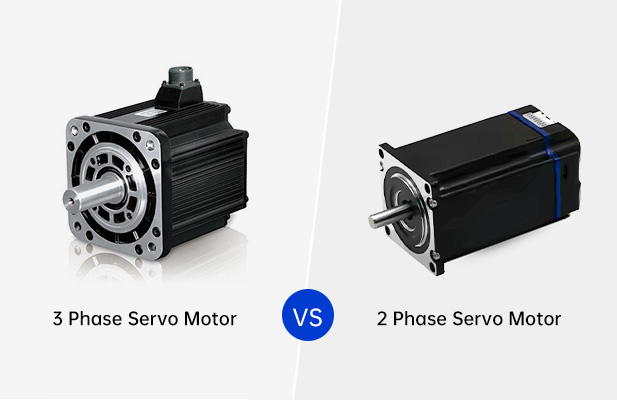
Servomotor trifásico vs. servomotor bifásico: una comparación detallada
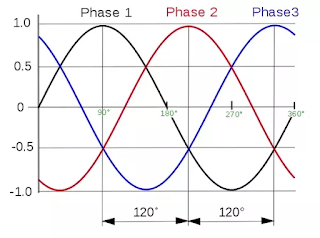
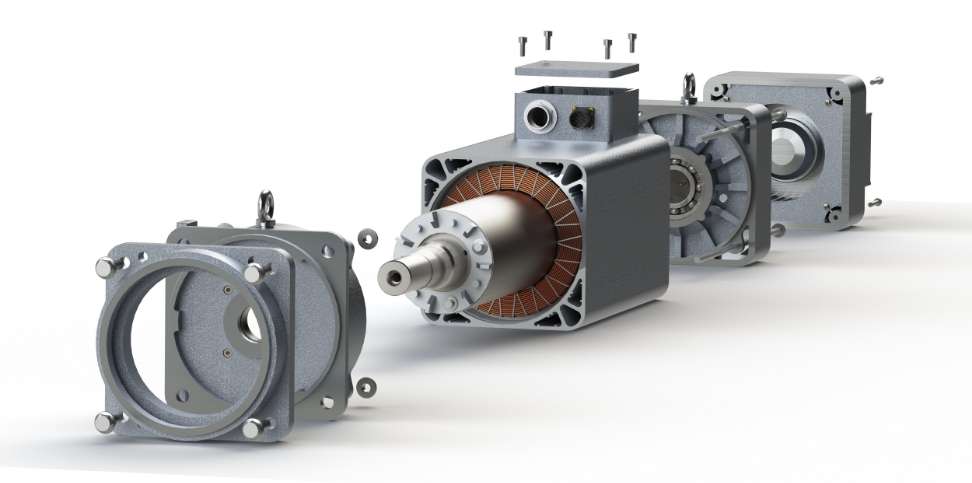
Entre los diferentes tipos de servomotores disponibles, el servomotor trifásico y el servomotor bifásico son los más utilizados. Aunque ambos tienen la misma función, su eficiencia, aplicaciones, rendimiento y diseño son diferentes. Compararemos los servomotores trifásicos y bifásicos en detalle, analizando sus diferencias, ventajas y desventajas. Entendiendo los servomotores Antes de profundizar en los detalles de los servomotores bifásicos y trifásicos, primero entendamos el concepto general de un servomotor. Un tipo de motor eléctrico diseñado para rotar o moverse con precisión a un punto preestablecido se llama servomotor. Está compuesto por un motor y un sensor que le da al controlador información sobre la ubicación y la velocidad del motor, que el controlador usa para modificar el comportamiento del motor. Los servomotores se pueden clasificar en dos categorías, en términos generales, según la cantidad de fases que utilizan: motores monofásicos y trifásicos. Servomotor monofásico: estos motores funcionan con corriente alterna (CA) monofásica y se utilizan normalmente para aplicaciones de baja potencia. Servomotor trifásico: estos motores funcionan con corriente alterna trifásica, lo que proporciona una mayor eficiencia y par, lo que los hace adecuados para aplicaciones de alta potencia y alta precisión. En este artículo, nos centraremos en las variantes bifásicas y trifásicas de los servomotores de CA, que se utilizan habitualmente en los sistemas de automatización industrial y control de movimiento. Servomotores trifásicos Un servomotor trifásico está diseñado para funcionar con una fuente de alimentación de CA trifásica, que proporciona tres señales eléctricas distintas que están desfasadas 120 grados. Esta configuración ayuda a producir una rotación más suave y continua, lo que hace que los motores trifásicos sean ideales para aplicaciones de alto rendimiento que requieren un alto par y precisión. Características principales de los servomotores trifásicos: Fuente de alimentación: el motor funciona con corriente alterna (CA) trifásica, con tres fases eléctricas distintas, lo que lo hace adecuado para aplicaciones de alta potencia. Par y eficiencia: el flujo continuo de energía a través de las tres fases da como resultado una entrega de par más suave, lo que reduce las vibraciones y mejora la eficiencia del motor. Rendimiento: un motor trifásico generalmente proporciona un par mayor, una mejor regulación de la velocidad y un funcionamiento más eficiente en comparación con un motor bifásico. Ventajas de los servomotores trifásicos: Mayor eficiencia: debido a su suministro de energía constante, los motores trifásicos son más eficientes, utilizan menos energía y producen menos calor. Control mejorado de par y velocidad: con un flujo de energía constante, el servomotor trifásico puede mantener una mejor regulación de par y velocidad, lo que lo hace adecuado para aplicaciones de alta precisión. Vibración reducida del motor: la transición suave entre fases ayuda a reducir las vibraciones, lo que genera un funcionamiento más silencioso y una vida útil más prolongada del motor. Aplicaciones de los servomotores trifásicos: Robótica: para un control preciso del movimiento. Máquinas CNC: tanto en fresadoras como en tornos. Sistemas de transporte: para controlar la velocidad y el posicionamiento de la cinta. Ascensores y escaleras mecánicas: para una regulación precisa de la velocidad. Vehículos eléctricos: para un control eficiente del motor en sistemas de tracción. Servomotores bifásicos Por otro lado, un servomotor bifásico funciona con una fuente de alimentación de CA bifásica. Las dos fases están separadas 90 grados y el sistema de control del motor ajusta la corriente en estas fases para proporcionar el movimiento necesario. Características clave de los servomotores bifásicos: Fuente de alimentación: los motores bifásicos utilizan una fuente de alimentación de CA bifásica, que es menos común que la fuente de alimentación trifásica estándar. Par y rendimiento: si bien el par entregado por un motor bifásico es generalmente menor que el de un motor trifásico, sigue siendo adecuado para aplicaciones que requieren precisión y control moderados. Rentabilidad: Debido a su diseño más simple, los motores bifásicos suelen ser más asequibles, lo que los hace atractivos para aplicaciones con presupuestos limitados. Ventajas de los servomotores bifásicos: Rentables: Los motores bifásicos tienden a ser menos costosos que los motores trifásicos debido a su diseño eléctrico más simple y a la menor cantidad de componentes. Sistemas de control más simples: Los sistemas de control de motores para motores bifásicos son generalmente más simples y asequibles, lo que los convierte en una buena opción para aplicaciones básicas. Diseño compacto: Normalmente, los motores bifásicos son más compactos y livianos en comparación con los motores trifásicos, lo que puede hacerlos adecuados para aplicaciones con espacio limitado. Aplicaciones de los servomotores bifásicos: Robótica a pequeña escala: Para movimientos simples y menos exigentes. Equipos médicos: En aplicaciones donde se necesita precisión, pero las demandas de energía son bajas. Sistemas de automatización pequeños: Como cintas transportadoras o control de posición para sistemas menos complejos. Diferencias clave entre los servomotores trifásicos y bifásicos Potencia y eficiencia: Servomotores trifásicos: son más eficaces para controlar el par y la velocidad porque utilizan energía trifásica, que proporciona un suministro de energía constante. Servomotores bifásicos: funcionan con solo dos fases, lo que limita su eficiencia en comparación con los motores trifásicos. Si bien siguen siendo eficientes para aplicaciones de energía baja a media, no pueden igualar la densidad de potencia y la suavidad de un sistema trifásico. Suavidad y entrega de par: Servomotores trifásicos: estos motores entregan un par más suave porque la potencia se divide en tres fases, lo que proporciona una rotación constante sin caídas de potencia notables. El flujo de corriente continuo también produce menos vibración. Servomotores bifásicos: la entrega de par no es tan suave como la de los motores trifásicos. Dado que la potencia se divide en solo dos fases, el motor experimenta más fluctuaciones en el par, lo que puede provocar un aumento de la vibración y el ruido en el funcionamiento. Costo y complejidad: Servomotores trifásicos: tienen un diseño más complejo y requieren una fuente de alimentación trifásica, lo que puede hacer que el sistema sea más costoso tanto en términos de inversión inicial como de costos operativos. Servomotores bifásicos: suelen ser más simples y económicos, tanto en