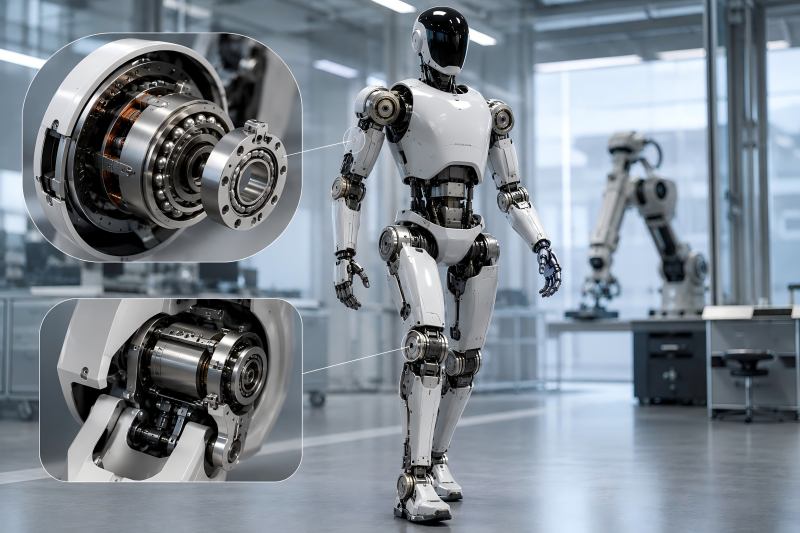
Los motores de engranajes armónicos desempeñan un papel importante en los robots humanoides, ya que proporcionan un par elevado, un tamaño compacto, un juego mínimo y un control preciso del movimiento. Se utilizan ampliamente en los mecanismos de hombros, codos, muñecas, caderas, rodillas, tobillos, cintura y cuello.
En el caso de los robots humanoides, la calidad del movimiento de las articulaciones afecta directamente a la estabilidad al caminar, al equilibrio, a la manipulación de objetos y a la simulación de movimientos humanos. Los motores de engranajes armónicos ayudan a los robots a moverse de forma más fluida, precisa y fiable.
Por qué los robots humanoides necesitan motores de engranajes de precisión
Los robots humanoides son diferentes de las simples máquinas industriales. Deben caminar, girar, mantener el equilibrio, levantar objetos, interactuar con personas y realizar movimientos flexibles. Estas acciones requieren que muchas articulaciones trabajen juntas al mismo tiempo.
Por ejemplo, cuando un robot humanoide camina, la cadera, la rodilla, el tobillo, la cintura y la parte superior del cuerpo deben coordinarse continuamente. Si una articulación tiene demasiado juego o retraso, el robot puede tambalearse, perder el equilibrio o moverse de forma antinatural.
Como resultado, el sistema de motores de las articulaciones debe cumplir unos requisitos de rendimiento clave.
| Requisito | Por qué es importante en los robots humanoides |
| Alto par | Soporta el peso corporal, la marcha, la elevación y el movimiento de las articulaciones |
| Bajo juego | Mejora la precisión y la estabilidad del movimiento |
| Tamaño compacto | Cabe en brazos, piernas y articulaciones de robots delgados |
| Peso ligero | Reduce la carga total del robot y el consumo de energía |
| Movimiento fluido | Hace que el movimiento sea más natural y similar al humano |
| Alta repetibilidad | Garantiza acciones estables durante tareas repetitivas |

¿Qué es un motor de engranajes armónicos?
Un motor de engranajes armónicos es un sistema de motor que utiliza un reductor armónico para reducir la velocidad y aumentar el par. El reductor consta de un generador de ondas, una lengüeta flexible y una lengüeta circular.
El generador de ondas transforma la ranura flexible en una elipse. A medida que el motor gira, la ranura flexible se acopla con la ranura circular. Dado que los dos engranajes tienen una pequeña diferencia en el número de dientes, la velocidad de salida se reduce mientras que el par de salida aumenta.
Esta estructura permite que un motor de engranajes armónicos alcance una alta relación de reducción en un espacio muy reducido. Resulta especialmente útil para robots humanoides, donde el espacio en las articulaciones es limitado pero la demanda de par es elevada.
Función principal de los motores de engranajes armónicos en los robots humanoides
Proporcionar un alto par en articulaciones compactas
Las articulaciones de los robots humanoides deben ser pequeñas pero potentes. Las articulaciones de los brazos, las piernas o la cintura de un robot no pueden utilizar una caja de engranajes industrial de gran tamaño, ya que esto haría que el robot resultara voluminoso y pesado.
Los motores de engranajes armónicos resuelven este problema al ofrecer una alta densidad de par. Pueden proporcionar un par de salida potente al tiempo que mantienen la articulación compacta. Esto ayuda a los diseñadores de robots a construir brazos más delgados, piernas más ligeras y proporciones corporales más parecidas a las humanas.
Por ejemplo, la articulación del hombro necesita suficiente par para levantar el brazo. Las articulaciones de la cadera y la rodilla necesitan un par aún mayor para soportar el movimiento de caminar y mantenerse de pie. Los motores de engranajes armónicos ayudan a satisfacer estas demandas de par sin ocupar demasiado espacio.
Mejora de la precisión de movimiento
Los robots humanoides suelen necesitar movimientos precisos. Cuando un robot coge un objeto, agita la mano, ajusta la postura o gira la cabeza, la articulación debe detenerse en la posición correcta.
Los motores de engranajes armónicos tienen un juego muy reducido, lo que ayuda a reducir el error de posicionamiento. Esto es importante para:
- Brazos robóticos
- Manos y dedos
- Rotación del cuello
- Movimiento de la cintura
- Equilibrio al caminar
- Manipulación de objetos
El bajo juego permite al robot moverse con mayor precisión y repetir la misma acción muchas veces con resultados estables.
Movimientos fluidos y similares a los humanos
Un robot humanoide no debe moverse como una máquina tosca. Su movimiento debe ser fluido, estable y controlado. Los motores de engranajes armónicos ayudan a lograrlo porque su acoplamiento de engranajes es continuo y compacto.
El movimiento fluido es importante para los robots de servicio, los robots médicos, los robots de investigación y los robots humanoides interactivos. Cuando un robot se mueve de forma natural, resulta más seguro y aceptable para las personas.
Por ejemplo, cuando un robot gira la cabeza, levanta el brazo o dobla la rodilla, el movimiento fluido de las articulaciones mejora la experiencia general del usuario.
Áreas de aplicación en las articulaciones de los robots humanoides
Las diferentes articulaciones de los robots tienen distintos requisitos de movimiento. Algunas articulaciones necesitan un par elevado, mientras que otras requieren una estructura compacta y un control preciso.
| Área de la articulación del robot | Función del motor de engranajes armónicos | Ventaja clave |
| Articulación del hombro | Controla la elevación y la rotación del brazo | Alto par y tamaño compacto |
| Articulación del codo | Permite el movimiento de flexión del brazo | Movimiento suave y preciso |
| Articulación de la muñeca | Permite un posicionamiento flexible de la mano | Bajo juego y alta precisión |
| Articulación de la cadera | Facilita la marcha y el equilibrio corporal | Alta capacidad de carga |
| Articulación de la rodilla | Controla la flexión y la extensión de la pierna | Gran par de salida |
| Articulación del tobillo | Ayuda al equilibrio y a la estabilidad al caminar | Respuesta rápida y precisión de control |
| Articulación de la cintura | Permite girar el cuerpo y ajustar la postura | Movimiento rotacional estable |
| Articulación del cuello | Controla el movimiento de la cabeza | Funcionamiento suave y silencioso |
Por qué los motores de engranajes armónicos son adecuados para los robots humanoides
Alta relación de reducción
Los robots humanoides suelen utilizar motores de alta velocidad, pero las articulaciones de los robots requieren un movimiento más lento y potente. Un reductor armónico puede proporcionar una alta relación de reducción en una sola etapa, convirtiendo la velocidad del motor en un par de articulación utilizable.
Esto ayuda al robot a moverse con fuerza y control, en lugar de a una velocidad descontrolada.
Bajo juego
El juego puede provocar holgura en las articulaciones, vibraciones y un posicionamiento impreciso. En los robots humanoides, esto puede afectar al equilibrio al caminar, al control de los brazos y a la manipulación de objetos.
Los motores de engranajes armónicos son conocidos por su bajo juego, lo que ayuda a mejorar la estabilidad y la precisión del robot.
Diseño compacto y ligero
El espacio es limitado dentro de las articulaciones de los robots humanoides. Los motores de engranajes armónicos son compactos, lo que facilita su integración en brazos, piernas, muñecas y tobillos.
Una articulación más ligera también reduce la carga sobre otras articulaciones. Por ejemplo, si el motor del brazo es más ligero, la articulación del hombro necesita menos par para levantar el brazo.
Alta densidad de par
La densidad de par indica la cantidad de par que un sistema de motor puede proporcionar en relación con su tamaño y peso. Los motores de engranajes armónicos ofrecen una alta densidad de par, lo cual es esencial para el diseño de robots humanoides.
Esto permite a los robots realizar movimientos más potentes sin necesidad de utilizar actuadores de gran tamaño.
Motores de engranajes armónicos frente a otras soluciones para articulaciones robóticas
Los robots humanoides también pueden utilizar motores de engranajes planetarios, reductores cicloidales, motores de accionamiento directo o sistemas de transmisión por correa. Sin embargo, los motores de engranajes armónicos suelen elegirse cuando la precisión y la compacidad son las principales prioridades.
| Elemento | Motor de engranajes armónicos | Motor de engranajes planetarios | Motor de accionamiento directo |
| Holgura | Muy bajo | De bajo a medio | Sin holgura de la caja de engranajes |
| Densidad de par | Alta | De media a alta | Menor, a menos que el motor sea grande |
| Tamaño | Muy compacto | Compacto | Normalmente más grande |
| Precisión | Excelente | Buena | Excelente |
| Relación de reducción | Alta en una sola etapa | Requiere varias etapas para una relación alta | Sin reducción |
| Coste | De medio a alto | Medio | Alto para un par elevado |
| Mejor uso | Articulaciones de robots de precisión | Articulaciones de automatización general | Articulaciones de control de par de alta gama |
Cómo ayudan los motores de engranajes armónicos a la marcha de los robots
Caminar es una de las tareas más difíciles para los robots humanoides. El robot debe mantener el equilibrio mientras mueve las piernas, desplaza el peso y ajusta la postura en tiempo real.
Los motores de engranajes armónicos mejoran el rendimiento al caminar de varias maneras.
En primer lugar, proporcionan el par suficiente para las articulaciones de la cadera, la rodilla y el tobillo. Estas articulaciones deben soportar el cuerpo del robot y controlar el movimiento de las piernas.
En segundo lugar, el bajo juego ayuda a reducir el movimiento indeseado de las articulaciones. Esto mejora el equilibrio y hace que el desplazamiento sea más estable.
En tercer lugar, el diseño compacto reduce el peso de las piernas. Unas piernas más ligeras requieren menos energía para moverse, lo que ayuda a mejorar la eficiencia.
En cuarto lugar, el posicionamiento preciso permite un mejor control de la marcha. El robot puede colocar el pie con mayor precisión y ajustar su postura con mayor suavidad.
Cómo mejoran los motores de engranajes armónicos los brazos y las manos de los robots
Los brazos robóticos necesitan precisión y flexibilidad. Un robot humanoide puede necesitar coger objetos, sujetar herramientas, abrir puertas, pulsar botones o dar la mano.
Los motores de engranajes armónicos son útiles en las articulaciones de los brazos porque proporcionan un movimiento suave y preciso. Ayudan al robot a controlar el hombro, el codo y la muñeca con mayor repetibilidad.
En el caso de las manos robóticas, se pueden utilizar motores de engranajes armónicos más pequeños o microactuadores de precisión para controlar el movimiento de los dedos. Aunque no todas las articulaciones de los dedos utilizan un motor de engranajes armónicos, el objetivo de diseño sigue siendo el mismo: tamaño compacto, control preciso y par fiable.
Factores importantes de selección
A la hora de elegir motores de engranajes armónicos para robots humanoides, los ingenieros deben tener en cuenta algo más que el par nominal. El motor debe adaptarse al sistema robótico completo.
Par y capacidad de carga
El motor debe proporcionar suficiente par para el movimiento, la sujeción de cargas, la aceleración y las condiciones de impacto. Las articulaciones de la cadera, la rodilla y el tobillo suelen requerir un par mayor que las de la muñeca o el cuello.
Peso y tamaño
Un motor más pequeño y ligero ayuda a reducir el peso total del robot. Esto es especialmente importante para los robots humanoides móviles que necesitan un tiempo de funcionamiento prolongado.
Holgura y precisión de posicionamiento
Un juego reducido es fundamental para la estabilidad al caminar, la manipulación de objetos y el control preciso de la postura.
Eficiencia y control del calor
Los robots humanoides pueden funcionar de forma continua, por lo que un calor excesivo del motor puede reducir la eficiencia, acortar la vida útil o dañar las piezas internas.
Vida útil
La chaveta flexible del interior de un reductor armónico funciona mediante deformación elástica. Por lo tanto, deben tenerse muy en cuenta la vida a fatiga, la calidad de los materiales, la lubricación y el diseño de la carga.
Retos comunes
Aunque los motores de engranajes armónicos son muy adecuados para los robots humanoides, también tienen algunas limitaciones.
Un reto es el coste. Los motores de engranajes armónicos suelen ser más caros que los motores de engranajes simples. En el caso de los robots con muchas articulaciones, el coste total de los actuadores puede ser elevado.
Otro reto es la carga de choque. Los impactos repentinos por caídas, saltos o movimientos rápidos pueden afectar a la vida útil del reductor. Los ingenieros deben diseñar márgenes de par adecuados y una protección mecánica.
El calor también es importante. Las articulaciones compactas de los robots pueden tener un espacio de refrigeración limitado, por lo que el diseño térmico debe tenerse en cuenta desde el principio.
