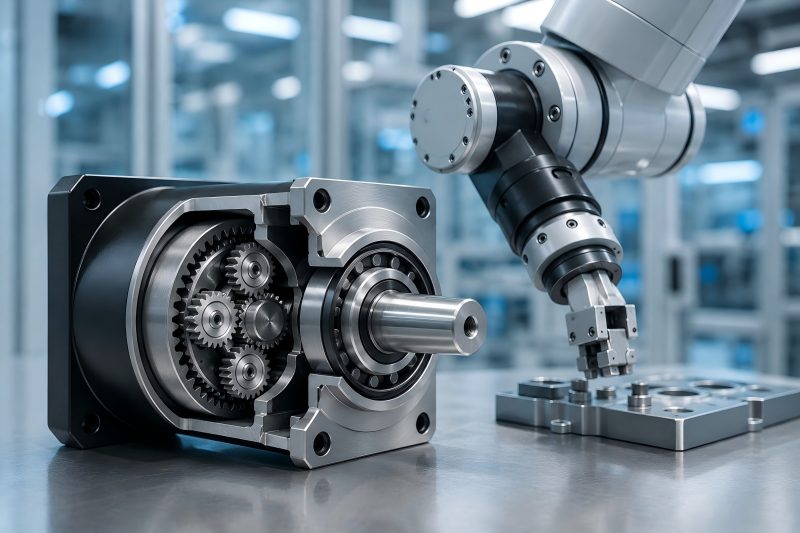
Os motores de engrenagens planetárias para robótica oferecem elevada densidade de binário, dimensões compactas, funcionamento suave e excelente desempenho de posicionamento. São amplamente utilizados em braços robóticos, AGVs, AMRs, robôs de serviço, robôs de inspeção e sistemas de automação industrial.
Por que razão os motores de engrenagens planetárias são utilizados na robótica
Os robôs precisam frequentemente de realizar movimentos repetidos com elevada precisão. Um motor simples pode rodar demasiado rápido e fornecer um binário insuficiente para tarefas de carga pesada ou de precisão. Uma caixa de engrenagens planetárias resolve este problema, reduzindo a velocidade e aumentando o binário.
Por exemplo, uma articulação robótica pode necessitar de uma rotação lenta e controlada enquanto transporta uma ferramenta, uma pinça ou uma carga útil. Um motor de engrenagem planetária pode fornecer o binário necessário, ajudando simultaneamente o sistema de controlo a manter um movimento suave e preciso.
Aplicações comuns em robótica
| Aplicação em robótica | Função do motor de engrenagem planetária | Requisitos-chave |
| Braços robóticos | Rotação e posicionamento das articulações | Alto binário, baixa folga, controlo suave |
| AGVs e AMRs | Transmissão e direção das rodas | Durabilidade, eficiência, tamanho compacto |
| Robôs de serviço | Movimento de braço, roda ou elevação | Funcionamento silencioso, velocidade estável |
| Robôs de inspeção | Movimento sobre esteiras, rodas ou com câmara | Resistência a choques, controlo fiável |
| Robôs colaborativos | Movimento articular e acionamento leve | Precisão, segurança, design compacto |
| Robôs de automação de armazéns | Elevação, movimentação e posicionamento | Ciclo de trabalho elevado, longa vida útil |
Principais vantagens dos motores de engrenagens planetárias para robótica
Alto binário num tamanho compacto
Uma das maiores vantagens dos motores de engrenagens planetárias é a sua elevada densidade de binário. Como a carga é partilhada por várias engrenagens planetárias, a caixa de engrenagens consegue transmitir mais binário sem necessitar de uma estrutura de grandes dimensões.
Isto é importante na robótica, onde o espaço interno compacto é essencial. Braços robóticos, plataformas móveis e sistemas de automação compactos beneficiam todos de uma unidade de acionamento mais pequena com elevada potência de saída.
Melhor precisão de movimento
As aplicações robóticas requerem frequentemente um controlo preciso da posição. Os motores de engrenagens planetárias podem suportar movimentos precisos quando combinados com motores, codificadores e sistemas de controlo adequados.
As caixas de engrenagens planetárias de baixa folga são especialmente úteis para articulações robóticas, pinças e mecanismos de posicionamento. Uma folga menor significa menos erros de movimento quando o motor muda de direção.
Funcionamento suave a baixa velocidade
Muitos movimentos robóticos requerem uma operação controlada a baixa velocidade, em vez de uma rotação rápida. Uma caixa de engrenagens planetárias reduz a velocidade do motor, aumentando simultaneamente o binário de saída.
Isto ajuda os robôs a moverem-se de forma mais suave durante tarefas de elevação, viragem, preensão, rotação e posicionamento.
Forte distribuição de carga
As engrenagens planetárias distribuem a carga por vários pontos de contacto, melhorando a resistência e ajudando a caixa de engrenagens a suportar arranques, paragens e movimentos de marcha-atrás frequentes.
Para robôs industriais e robôs de armazém, isto é importante porque trabalham frequentemente de forma contínua em condições exigentes.
Alta eficiência
Em comparação com alguns sistemas tradicionais de redução por engrenagens, as caixas de engrenagens planetárias oferecem geralmente uma boa eficiência de transmissão. Isto melhora a eficiência e reduz a acumulação de calor.
Para robôs alimentados a bateria, tais como AGVs, AMRs, robôs de entrega e robôs de inspeção, uma maior eficiência pode permitir um tempo de funcionamento mais prolongado.
Instalação compacta e flexível
Os motores de engrenagens planetárias estão disponíveis em diferentes tamanhos, relações de transmissão, estilos de eixo de saída e opções de montagem. Isto permite uma integração mais fácil em diversos projetos de robôs.
Podem ser utilizados em módulos de rodas, articulações robóticas, plataformas rotativas, sistemas de elevação e dispositivos de automação personalizados.
Motor de engrenagem planetária vs. outros tipos de motores de engrenagem na robótica
| Tipo de motor de engrenagens | Vantagens | Limitações | Utilização adequada em robótica |
| Motor de engrenagem planetária | Alta densidade de binário, compacto, eficiente, preciso | Custo mais elevado do que as caixas de engrenagens simples | Braços robóticos, AGVs, AMRs, articulações de precisão |
| Motor de engrenagem sem-fim | Elevada relação de redução, opção de autobloqueio | Menor eficiência, maior aquecimento | Mecanismos de elevação, sistemas de baixa velocidade |
| Motor de engrenagem reta | Estrutura simples, económico | Mais ruído, menor densidade de binário | Robôs básicos, movimentos de baixa intensidade |
| Motor de engrenagem helicoidal | Funcionamento suave, maior capacidade de carga | Tamanho maior, estrutura mais complexa | Automação industrial e robôs para serviços pesados |
| Motor de acionamento harmónico | Precisão muito elevada, compacto | Custo mais elevado, menor resistência ao choque | Robôs colaborativos, articulações robóticas de precisão |
Para muitas aplicações robóticas, os motores de engrenagem planetária oferecem um equilíbrio prático entre precisão, binário, eficiência e custo.
Dicas importantes para a seleção de motores de engrenagem planetária em robótica
A escolha do motor de engrenagem planetária certo não se resume apenas à potência do motor. A seleção deve considerar o binário, a velocidade, a folga, o ciclo de trabalho, o método de controlo, o espaço de instalação e o ambiente operacional.
Defina os requisitos de carga
Comece por calcular a carga que o robô precisa de mover. Isto inclui o peso da peça do robô, carga útil, ferramentas, rodas, braços ou mecanismo de elevação.
No caso dos braços robóticos, os requisitos de binário variam consoante o comprimento do braço e a posição da carga útil. Para robôs móveis, o motor deve superar a resistência ao rolamento, a exigência de aceleração, o ângulo de inclinação e o peso da carga útil.
Os fatores-chave incluem:
- Peso da carga útil
- Comprimento do braço ou raio da roda
- Requisito de aceleração
- Ângulo de operação
- Atrito e resistência
- Fator de segurança
Um motor demasiado pequeno pode sobreaquecer ou avariar prematuramente. Um motor demasiado grande pode aumentar o custo, o peso e o consumo de energia.
Escolha a relação de transmissão correta
| Intervalo da relação de transmissão | Característica de saída | Aplicação robótica típica |
| 3:1–10:1 | Velocidade mais elevada, binário moderado | Movimento rotativo rápido, rodas para serviços leves |
| 10:1–30:1 | Velocidade e binário equilibrados | Articulações robóticas, robôs de serviço, pequenos AGVs |
| 30:1–100:1 | Alto binário, velocidade mais baixa | Elevação, articulações para cargas pesadas, módulos de direção |
| 100:1+ | Torque muito elevado, velocidade muito baixa | Posicionamento especial ou automação para serviços pesados |
A melhor relação de transmissão deve corresponder à velocidade e ao binário exigidos pelo robô, e não apenas à capacidade máxima do motor.
Preste atenção à folga
A folga é a pequena margem de movimento entre as engrenagens. Na robótica, a folga pode afetar a precisão de posicionamento, a repetibilidade e a resposta de controlo.
Para sistemas simples de tração às rodas, uma folga moderada pode ser aceitável. Para braços robóticos, sistemas de posicionamento de câmaras ou pinças de precisão, é normalmente necessária uma folga reduzida.
Orientação geral:
- Articulações robóticas de alta precisão: escolha caixas de engrenagens planetárias de baixa folga
- Rodas de robôs móveis: uma folga padrão pode ser aceitável
- Robôs de inspeção ou com câmara: uma folga menor melhora a precisão de apontamento
- Robôs colaborativos: uma folga reduzida permite movimentos mais suaves e seguros
Combine o tipo de motor
As caixas de engrenagens planetárias podem ser combinadas com diferentes motores, incluindo motores de corrente contínua, motores de corrente contínua sem escovas, motores de passo e servomotores.
Cada tipo de motor tem vantagens diferentes.
| Tipo de motor | Vantagens | Ideal para |
| Motor CC com caixa de engrenagens planetárias | Controlo simples, económico | Robôs pequenos, movimentos de baixa intensidade |
| Motor BLDC com caixa de engrenagens planetárias | Alta eficiência, longa vida útil, baixa manutenção | AGVs, AMRs, robôs de serviço |
| Motor de engrenagem planetária de passo | Bom posicionamento, controlo em malha aberta possível | Posicionamento a baixa velocidade, automação de pequena escala |
| Servomotor com engrenagem planetária | Alta precisão, resposta rápida, controlo em malha fechada | Braços robóticos, articulações de precisão, robôs industriais |
Para robótica de alto desempenho, os motores servo ou BLDC com engrenagem planetária são frequentemente preferidos porque proporcionam melhor controlo, eficiência e fiabilidade.
Considere a eficiência e o calor
Os robôs trabalham frequentemente durante longos períodos. Se o motor de engrenagens tiver baixa eficiência, poderá gerar mais calor e consumir mais energia.
Isto é especialmente importante para:
- Robôs móveis alimentados a bateria
- Articulações robóticas fechadas
- Sistemas de automação de ciclo de trabalho intenso
- Robôs que operam em ambientes quentes
Um motor de engrenagens planetárias de alta eficiência ajuda a melhorar o tempo de funcionamento, reduzir o stress térmico e proteger os componentes internos.
Verifique o tamanho e o espaço de montagem
Os sistemas robóticos têm normalmente limites de espaço rigorosos. Antes de selecionar um motor de engrenagem planetária, verifique o espaço de instalação disponível, o padrão dos orifícios de montagem, o tipo de eixo, a direção do cabo e o comprimento da caixa de engrenagens.
As dimensões importantes incluem:
- Diâmetro da caixa de engrenagens
- Comprimento total do motor
- Diâmetro do eixo de saída
- Tamanho da flange de montagem
- Posição do cabo ou conector
- Espaço necessário para o codificador
Para robôs compactos, um motor de engrenagens planetárias mais curto e mais leve pode melhorar o layout mecânico e reduzir o peso total do sistema.
Avalie o ciclo de trabalho e a vida útil
As aplicações robóticas podem envolver movimentos frequentes de arranque e paragem, inversões repetidas, cargas de choque ou funcionamento contínuo. O motorredutor selecionado deve ser capaz de suportar o ciclo de trabalho real.
Para robôs industriais ou AGVs, a durabilidade é fundamental. A caixa de engrenagens deve ter rolamentos resistentes, lubrificação estável, engrenagens endurecidas e vedação adequada.
Deve considerar:
- Operação contínua ou intermitente
- Número de arranques e paragens por hora
- Mudanças de direção
- Flutuação de carga
- Horas de funcionamento previstas
- Requisitos de manutenção
Selecione o encoder e o feedback de controlo adequados
Na robótica de precisão, o motor pode necessitar de um encoder para feedback de posição, velocidade e direção. Isto permite que o sistema de controlo monitorize o movimento e corrija erros.
A seleção do encoder depende da precisão necessária. Encoders de maior resolução proporcionam um melhor feedback, mas podem aumentar o custo e a complexidade do controlo.
Braços robóticos, robôs colaborativos e sistemas de posicionamento por câmara geralmente necessitam de um controlo de feedback melhor do que os robôs simples com tração por rodas.
Erros comuns na seleção de motores de engrenagens planetárias para robótica
Muitos problemas de seleção resultam de se concentrar apenas no binário nominal ou na potência do motor. Em sistemas robóticos reais, o desempenho depende das condições operacionais completas.
Erros comuns incluem:
- Escolher uma relação de transmissão sem verificar a velocidade de saída final
- Ignorar o binário de pico durante a aceleração
- Utilizar caixas de engrenagens com folga padrão para articulações de precisão
- Selecionar um motor demasiado grande para a estrutura do robô
- Ignorar a acumulação de calor em espaços fechados
- Esquecer a compatibilidade do codificador e do controlador
- Não considerar cargas de choque e inversões repetidas
- Escolher com base no preço em vez do desempenho ao longo do ciclo de vida
Um processo de seleção correto deve equilibrar desempenho, tamanho, controlo, durabilidade e custo.
Como escolher um motor de engrenagem planetária para um projeto de robótica
Um processo de seleção prático pode seguir estes passos:
- Definir o tipo de movimento do robô: tração nas rodas, rotação das articulações, elevação, preensão ou direção.
- Calcule o binário e a velocidade necessários no eixo de saída.
- Selecione uma relação de transmissão adequada com base nas necessidades de velocidade e torque.
- Escolha o tipo de motor de acordo com os requisitos de controlo.
- Confirme o nível de folga para garantir a precisão de posicionamento.
- Verifique a compatibilidade de tensão, corrente, controlador e codificador.
- Analise o tamanho, o peso, a estrutura de montagem e o design do eixo.
- Considere o ambiente de funcionamento, o ciclo de trabalho e a vida útil.
- Teste o motor em condições reais de carga antes da produção em série.
