중공축 서보 모터 대 이중 샤프트 서보 모터:자세한 비교
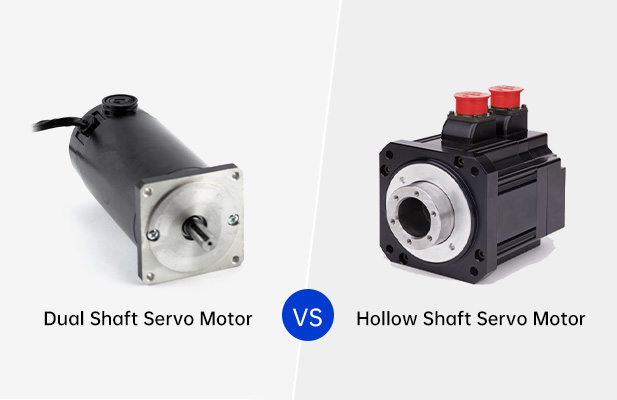
모션 제어 분야에서 서보 모터는 다양한 산업 응용 분야에서 정밀하고 효율적인 작동을 보장하는 데 중요한 구성 요소입니다. 다양한 유형의 서보 모터 중에서 Hollow Shaft Servo Motors와 듀얼 샤프트 서보 모터 는 높은 수준의 성능이 필요한 작업에 인기 있는 선택입니다. 이 글에서는 중공축 및 듀얼축 서보 모터의 주요 특징, 장점, 응용 분야를 살펴보고 구조, 응용 분야, 토크 전달, 유연성 등 몇 가지 중요한 매개변수를 기준으로 두 모터를 비교합니다. 홀로우 샤프트 서보 모터란? 중공 샤프트 서보 모터는 샤프트의 핵심이 비어 있어 다른 구성 요소가 모터의 중앙을 통과할 수 있는 유형의 모터입니다. 이 설계는 공간이 제한되어 있거나 케이블이나 호스와 같은 추가 구성 요소를 모터의 중앙을 통과해야 하는 응용 분야에 컴팩트하고 유연한 솔루션을 제공합니다. 중공축 서보 모터의 주요 특징 Hollow Center: Hollow 샤프트 모터의 주요 특징은 샤프트의 빈 중앙으로, 케이블, 튜브 또는 기타 기계 시스템이 통과할 수 있습니다. 컴팩트한 디자인: 이러한 모터는 일반적으로 더 작고 컴팩트하여 공간이 매우 중요한 애플리케이션에 이상적입니다. 간소화된 통합: Hollow 샤프트 디자인은 솔리드 샤프트가 있는 모터에 필요한 추가 베어링, 커플링 또는 기타 구성 요소가 필요 없습니다. 소음 및 진동 감소: Hollow 샤프트 디자인은 고정밀 애플리케이션에서 기계적 소음과 진동을 줄일 수 있습니다. 중공축 서보 모터의 응용 분야 높은 정밀도와 공간 효율성이 필요한 애플리케이션은 일반적으로 중공축 서보 모터를 활용합니다. 일반적인 애플리케이션에는 다음이 포함됩니다. 의료 장비: 중공 샤프트는 MRI 또는 초음파 장비와 같은 기계에 필수적인 케이블이나 튜빙의 통과를 허용합니다. 로봇공학: 로봇과 자동화된 팔은 종종 중공 샤프트 모터를 사용하여 공간을 절약하고 유연성을 높입니다. CNC 기계: 이러한 모터는 일반적으로 CNC 기계에서 발견되며, 정밀도와 컴팩트한 통합이 중요합니다. 포장 기계: 중공 샤프트 모터는 케이블 관리를 위한 공간과 유연성이 중요한 자동화된 포장 시스템에 사용됩니다. 듀얼 샤프트 서보 모터란? 듀얼 샤프트 서보 모터는 두 개의 샤프트를 특징으로 하는 모터 유형입니다. 하나는 전면에, 다른 하나는 후면에 있습니다. 이 설계를 통해 모터는 양쪽 끝에서 출력 전력을 제공할 수 있어 기계적 부하나 외부 장비를 연결하는 데 추가적인 유연성을 제공합니다. 듀얼 샤프트 서보 모터의 주요 특징 2개의 출력 샤프트: 듀얼 샤프트 모터의 결정적인 특징은 2개의 출력 샤프트가 있어 모터가 2개의 다른 기계 시스템 또는 구성 요소를 동시에 구동할 수 있다는 것입니다. 다재다능함: 듀얼 샤프트 모터는 2개의 이동 부품이 있는 컨베이어 시스템이나 2개의 독립적으로 제어되는 조인트가 있는 로봇 팔과 같이 2개의 별도 장치 또는 시스템에 결합될 수 있으므로 매우 다재다능합니다. 컴팩트하고 균형 잡힌 설계: 듀얼 샤프트 모터의 설계는 종종 단일 샤프트가 있거나 진동을 유발할 수 있는 방식으로 오프셋된 모터에 비해 더 컴팩트하고 균형 잡힐 수 있습니다. 변속의 복잡성 감소: 모터에 2개의 샤프트가 장착되어 있기 때문에 추가 기계적 변속 구성 요소가 필요 없어 시스템의 전반적인 설계가 간소화됩니다. 듀얼 샤프트 서보 모터의 응용 분야 듀얼 샤프트 서보 모터는 단일 모터에서 두 개의 모션 출력이 필요한 애플리케이션에서 널리 사용됩니다. 일반적인 애플리케이션에는 다음이 포함됩니다. 로봇 팔: 듀얼 샤프트 모터는 종종 서로 다른 움직임을 동시에 제어하기 위해 두 개의 독립적인 출력이 필요한 로봇 팔에 사용됩니다. 컨베이어 시스템: 여러 개의 이동 부품이 있는 컨베이어 시스템에서 듀얼 샤프트 모터는 컨베이어의 양쪽 끝을 구동하여 시스템의 효율성을 높일 수 있습니다. 자동화 기계: 식품 가공, 포장 및 제약 제조와 같이 정밀도가 중요한 산업에서 듀얼 샤프트 모터를 사용하여 기계의 여러 요소를 제어할 수 있습니다. 중공축과 듀얼축 서보 모터의 주요 차이점 중공축과 듀얼축 서보 모터의 차이점을 더 잘 이해하기 위해 구조, 유연성, 토크 전달, 공간 요구 사항 및 응용 분야와 같은 몇 가지 중요한 요소를 비교해 보겠습니다. 건설 특징 중공축 서보 모터 이중축 서보 모터 샤프트 유형 중앙 개방형 중공축 전면과 후면에 각각 하나씩 두 개의 샤프트 설계 개방형 중심을 가진 컴팩트 디자인 양쪽 끝에 샤프트가 있는 이중 출력 디자인 공간 효율성 높음 – 샤프트를 통해 케이블 배선 가능 보통 – 두 개의 샤프트 공간이 필요 중공축 모터는 중앙이 비어 있는 반면, 듀얼 샤프트 모터는 두 개의 출력 샤프트로 설계되었습니다. 중공축 설계는 모터를 통해 케이블이나 기계 부품을 라우팅할 때 더 많은 유연성을 제공하는 반면, 듀얼 샤프트 모터는 여러 구성 요소를 구동하는 데 더 많은 다양성을 제공합니다. 유연성 특징 중공축 서보 모터 이중축 서보 모터 통합성 협소한 공간 및 컴팩트한 응용 분야에 적합 두 개의 출력이 동시에 필요한 응용 분야에 이상적 배선 능력 케이블, 튜브 또는 기계 부품 통과 가능 서로 다른 구동을 위한 두 개의 출력 연결 제공 케이블이나 호스와 같이 모터 샤프트를 통해 추가 부품을 통과해야 하는 공간 제약이나 요구 사항이 필요한 애플리케이션은 중공 샤프트 모터에 가장 적합합니다. 반면, 듀얼 샤프트 모터는 추가 전달 메커니즘이 필요 없이 독립적인 움직임으로 여러 부품이나 구성 요소를 구동하는 데 유연성을 제공합니다. 토크 전달 특징 중공축 서보 모터 이중축 서보 모터 토크 분배 단일 샤프트에서 토크 전달 두 개의 샤프트에서 동시에 토크 전달 기계적 부하 단일 부하 적용에 최적 여러 부하 연결이 필요한 응용 분야에 이상적 두 유형의 모터 모두 높은 토크를 제공할 수 있지만, 듀얼 샤프트 설계는 두 구성 요소에 걸쳐 토크 분배가 필요한 애플리케이션에 유리할 수 있습니다. 반면, 중공 샤프트 모터는 일반적으로 단일 출력 샤프트를 통해 토크를 제공하므로 단일 기계적 부하가 있는 작업에 더 적합합니다. 응용 프로그램 특징 중공축 서보 모터 이중축 서보 모터 이상적인 적용 분야 로봇, CNC, 포장 기계, 의료 기기 로봇, 컨베이어 시스템, 자동화 기계 공간 고려 사항 공간이 제한된 응용 분야에 최적 듀얼 출력이 필요한 응용 분야에 적합 두 모터 모두 다양한 응용 분야에서 탁월합니다. 중공축 모터는 일반적으로 공간이 중요한 의료, 로봇 및 산업 환경에서 선호됩니다. 이중축 모터는 로봇 팔이나 독립적인 이동 부품이 있는 컨베이어와 같이 단일 모터에서 여러 출력을 필요로 하는 시스템에 더 적합합니다. 홀로우 샤프트 서보 모터와 듀얼 샤프트 서보 모터 중 어떤 것을 선택해야 할까요? 중공축 또는 이중축 서보 모터를 선택하는 결정은 주로 애플리케이션의 특정 요구 사항에 따라 달라집니다. 몇 가지 고려 사항은 다음과 같습니다. 다음의 경우 Hollow Shaft Servo Motor를 선택하세요: 케이블이나 튜브를 라우팅하기 위한 공간 효율성과 유연성이 중요합니다. 이 애플리케이션에는 모터가 의료 장비나 자동화 시스템과 같이 좁은 공간에 통합되어야 하는 복잡한 기계가 포함됩니다. 컴팩트한 공간에 간단히 통합할 수 있는 컴팩트한 모터가 필요합니다. 다음의 경우 듀얼 샤프트 서보 모터를 선택하세요: 이 시스템은 여러 요소 또는 구성 요소를 동시에 제어하기 위해 두 개의 독립적인 출력이 필요합니다. 여러 부분을 구동하기 위해 단일 모터를 사용하여 전송 시스템의 복잡성을 줄여야 합니다. 귀하의 애플리케이션에는 로봇 팔이나 다축 제어 시스템과 같이 두 개의 활성 이동 부품이 필요한 로봇 공학 또는 기계가 포함됩니다. 결론 중공축과 듀얼 샤프트 서보 모터는 모두 고유한 이점을 제공하며, 올바른 모터를 선택하는 것은 애플리케이션의 특정 요구 사항에 따라 달라집니다. 중공축 모터는 공간이 제한된 환경에 이상적이며 케이블과 구성 요소를 라우팅하는 데 뛰어난 유연성을