인러너형 대 아웃러너형 BLDC 모터: 잔디깎이 로봇에 더 적합한 모터는 무엇일까요?
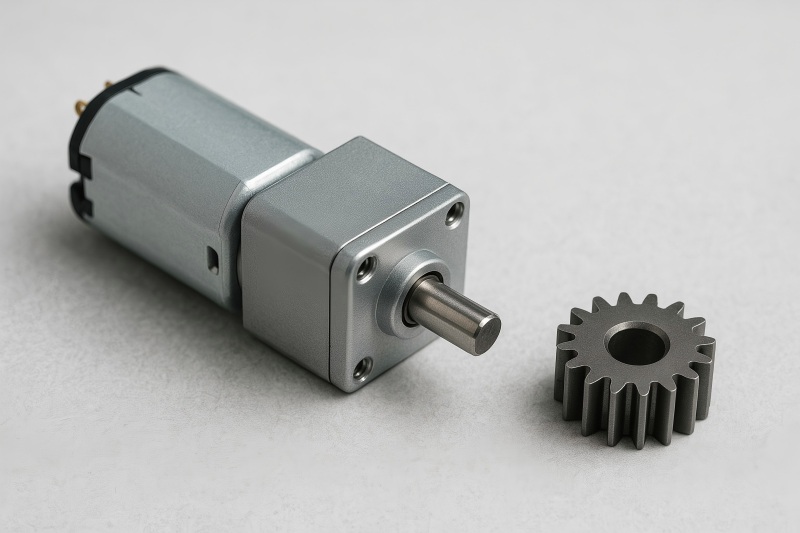
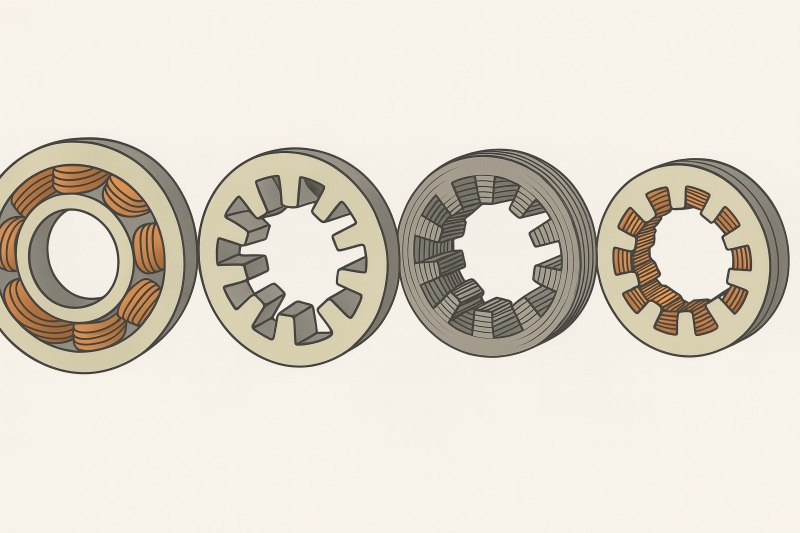
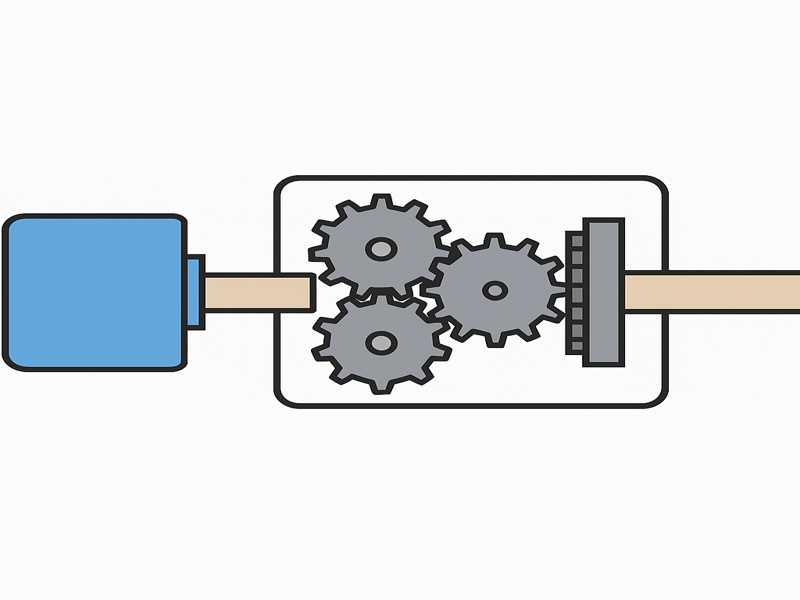
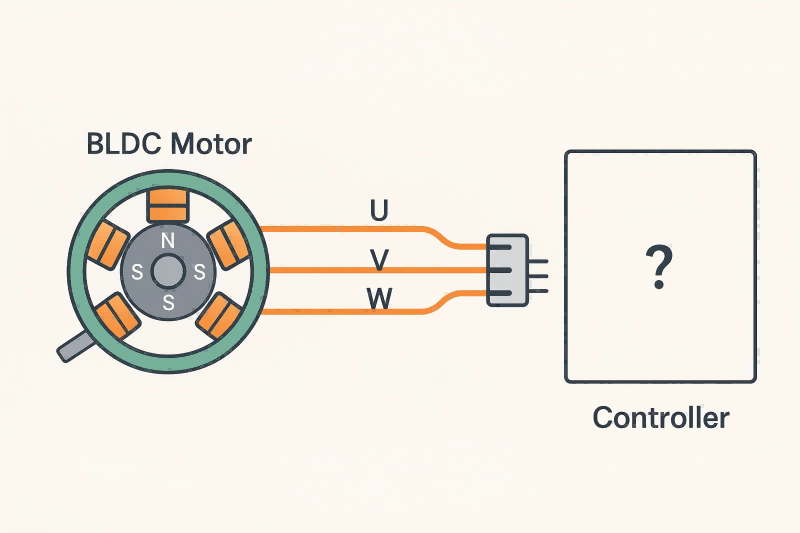
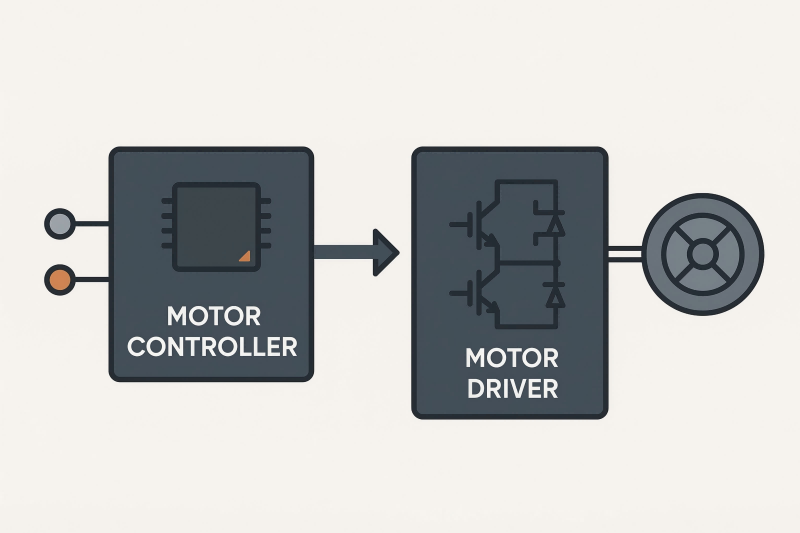
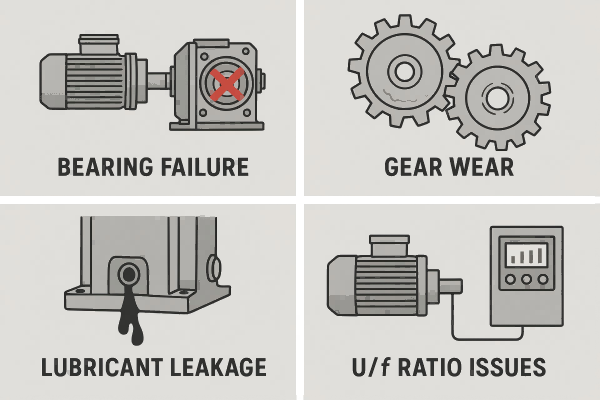
Importance of Motors in Robotic Lawn Mowers The motor is the heart of every robotic lawn mower. It converts electrical energy into mechanical motion, driving both the cutting blades and the wheels that move the mower across the lawn. With the rise of smart home automation and autonomous outdoor robots, motor performance has become a defining factor for cutting quality, runtime, and reliability. Traditional brushed DC motors once dominated small robotics, but their limited lifespan, brush wear, and energy losses made them unsuitable for modern robotic mowers. BLDC motors offer efficiency, quiet operation, and minimal maintenance. These motors use electronic commutation instead of brushes, eliminating frictional losses and extending operational life — essential for outdoor robots that must endure long mowing cycles under varying loads. Among mower electric motor designs, Inrunner and Outrunner motors represent two distinct structural types. Both use the same electromagnetic principles but differ in rotor placement and performance characteristics. Choosing between them can determine whether a mower runs smoothly over uneven terrain, manages wet grass effectively, or drains its battery prematurely. Motor Requirements for Robotic Lawn Mowers A robotic lawn mower’s operational environment is demanding. It must handle tall or damp grass, operate quietly, and traverse slopes while consuming as little energy as possible. These conditions create specific performance requirements for its motors. High Torque at Low Speeds The drive system needs torque to propel the mower through thick or wet grass, especially when ascending slopes or maneuvering on uneven terrain. Stable RPM and Smooth Operation The blade motor must maintain a consistent cutting speed, typically between 3,000 and 4,000 RPM, to ensure even trimming and avoid grass tearing. Energy Efficiency Since robotic mowers rely on batteries, the motors must operate efficiently to maximize runtime before recharging. Quiet Performance Noise reduction is vital for consumer comfort and compliance with residential sound standards. Durability and Weather Resistance Motors must endure dust, moisture, and temperature fluctuations outdoors. Compact Integration The motor’s size and weight directly affect the robot’s balance, maneuverability, and total power-to-weight ratio. These criteria influence whether an inrunner or outrunner configuration is more suitable for each function within the mower. 로봇 잔디깎이 기계의 내부 로터의 장점과 단점 Inrunner BLDC motors feature a rotating inner rotor surrounded by a stationary stator. Their cylindrical structure is compact and mechanically robust, allowing for high rotational speeds and precise control. Advantages High Speed Performance Inrunner motors are optimized for high RPM, often exceeding 10,000 revolutions per minute. This makes them ideal for cutting blades, where high-speed rotation translates into a clean, efficient cut. 컴팩트한 디자인 Their smaller diameter and enclosed rotor allow easier integration into tight spaces — suitable for smaller robotic platforms. 정밀 제어 The rotor’s low inertia enables rapid acceleration and deceleration, supporting precise speed regulation. Effective Sealing Against Debris Because the rotor is internal, these motors can be sealed more effectively against dust, moisture, and grass clippings — a valuable feature for outdoor use. Low Maintenance and Long Life No brushes mean reduced wear, and their rigid internal design protects internal components during long mowing sessions. Disadvantages Low Torque Output The small rotor radius limits torque generation, requiring additional gear reduction for wheel drive applications. Cooling Challenges The rotor’s position inside the stator makes it harder to dissipate heat. This can affect performance during long or heavy mowing sessions unless auxiliary cooling is used. Higher Cost and Complexity Achieving sufficient torque often requires precision gearboxes, increasing system cost and mechanical complexity. Less Energy-Efficient at Low Speeds Their efficiency peaks at high RPMs, making them less suitable for slow, continuous wheel motion. In short, inrunner motors shine when used for blade rotation or compact auxiliary mechanisms, but they are not always the best choice for drive systems where torque is critical. Pros and Cons of External Rotors in Robotic Lawn Mowers Outrunner BLDC motors reverse the inrunner’s structure: the rotor is on the outside, rotating around the internal stator. This design provides a larger diameter and a longer magnetic path, directly enhancing torque output — a major benefit for propulsion. Advantages High Torque at Low RPM The larger rotor radius and magnetic leverage deliver high torque without requiring complex gear reduction systems, ideal for wheel drive motors. Natural Air Cooling Because the rotor spins externally, it helps dissipate heat effectively, maintaining stable operation in outdoor environments. Efficient for Continuous Low-Speed Operation Outrunner motors maintain strong efficiency even at lower speeds, extending battery runtime during long mowing cycles. Smooth Motion and Strong Start-Up Power They provide stable rotational force even under variable load conditions such as dense or uneven grass. Simpler Design, Lower Maintenance Without additional gearing, outrunners can be directly coupled to wheels or blades, reducing mechanical losses. Disadvantages Larger Size and Weight Their larger diameter can make compact mower designs more difficult, especially for multi-rotor configurations. Exposure to Debris Because the outer rotor spins externally, more care is needed in sealing against grass particles or dust ingress. Reduced Maximum RPM Outrunners typically operate below 6,000 RPM, making them less efficient for fast-rotating cutting blades unless optimized. Inertia Effects The heavier outer rotor increases rotational inertia, slowing rapid speed changes or braking response. Despite these trade-offs, the outrunner design offers superior torque, durability, and cooling for traction systems, making it the preferred choice for the propulsion side of robotic lawn mowers. Inrunner vs Outrunner Motor Comparison Table Feature Inrunner BLDC Motor Outrunner BLDC Motor Rotor Position Inside the stator Outside the stator Torque Output Moderate to low High Speed Range High RPM (10,000+) Low-to-medium RPM (2,000–6,000) Efficiency Range Best at high speed Best at low-to-mid speed Cooling Internal, less effective Natural air cooling Noise Level Slightly higher Lower, smoother rotation Size & Weight Smaller diameter, lighter Larger diameter, heavier Application Suitability Blade motors, compact tools Drive motors, load applications Maintenance Minimal Minimal, but requires sealing Control Precision Excellent Moderate Cost Level Slightly higher (gearbox required) Lower (direct drive capable) The table shows that inrunner motors favor compactness and speed, while outrunner motors dominate in torque and simplicity.