Types de motoréducteurs : un guide complet
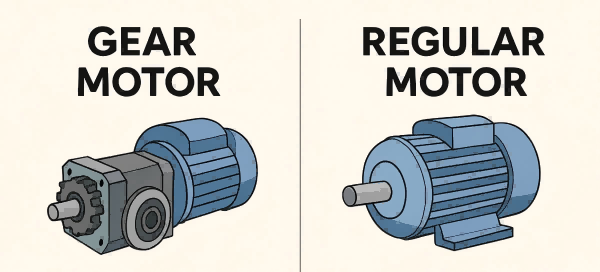
Les motoréducteurs sont la pierre angulaire d’innombrables systèmes mécaniques et industriels. Des bandes transporteuses à la robotique, en passant par les dispositifs médicaux et les machines lourdes, ils fournissent le couple et le contrôle nécessaires à un mouvement de précision. En tant que fabricant de motoréducteurs, comprendre la diversité des types de motoréducteurs et guider ses clients vers le bon choix est essentiel pour garantir des performances optimales. Qu’est-ce qu’un motoréducteur ? La vitesse du motoréducteur est réduite et le couple produit est augmenté grâce aux engrenages. Cette combinaison améliore la capacité du moteur à effectuer des tâches exigeant une force supérieure à la vitesse, comme soulever, tourner ou déplacer des charges lourdes avec une grande précision. Classification par types d’engins Moteurs à engrenages droits Les moteurs à engrenages droits utilisent des engrenages à coupe droite et sont parmi les plus couramment utilisés dans les applications à faible vitesse et à couple élevé. Caractéristiques principales : Conception simple et fabrication facile Rendement élevé (jusqu’à 98 %) Idéal pour les configurations d’arbres parallèles Applications : Machines d’impression, équipements d’emballage, machines textiles Moteurs à engrenages hélicoïdaux Les engrenages hélicoïdaux ont des dents inclinées qui s’engagent progressivement, offrant un fonctionnement plus fluide, des vibrations réduites et des performances plus silencieuses par rapport aux engrenages droits. Caractéristiques principales : Capacité de charge supérieure à celle des engrenages droits standard. Meilleure transmission du couple et réduction du bruit. Montage possible en configurations parallèles ou perpendiculaires. Applications : Ascenseurs, convoyeurs, systèmes de manutention Moteurs à engrenages coniques Les moteurs à engrenages coniques utilisent des engrenages coniques pour transférer le mouvement entre les arbres qui se croisent, généralement positionnés à un angle de 90 degrés pour le changement de direction. Caractéristiques principales : Conception compacte avec couple élevé Efficace pour les changements de direction Disponible en engrenages coniques droits ou hélicoïdaux Applications : Systèmes de direction automobile, machines-outils, mélangeurs Moteurs à vis sans fin Ils utilisent un engrenage à vis sans fin en forme de vis qui s’engrène avec une roue à vis sans fin, offrant un couple élevé avec une réduction de vitesse significative. Caractéristiques principales : Très compact pour des rapports de réduction élevés Fonctionnement silencieux Auto-verrouillage (empêche le recul) Applications : Portails et barrières, ascenseurs, monte-charges, équipements de scène Moteurs à engrenages planétaires Une couronne extérieure, des engrenages planétaires autour d’elle et un engrenage solaire central constituent les réducteurs planétaires. Caractéristiques principales : Rapport couple/poids élevé Excellente répartition de la charge Compact et durable Applications : Robotique, véhicules électriques, automatisation industrielle Classification par intégration du type de moteur Motoréducteurs à courant alternatif Utilisez du courant alternatif comme source d’alimentation. Idéal pour les applications à service continu. Applications : Pompes, soufflantes, ventilateurs et convoyeurs Moteurs à engrenages à courant continu Alimenté par courant continu et offre un contrôle facile de la vitesse. Applications : Robotique, automobile, machines portables Moteurs à engrenages à courant continu sans balais (BLDC) Moteurs à courant continu avec commutation électronique avancée. Avantages : Rendement supérieur et durée de vie prolongée Faible bruit et faible entretien Couple élevé à bas régime Applications : Dispositifs médicaux, systèmes d’automatisation et drones Moteurs à engrenages pas à pas Combinez des moteurs pas à pas avec des réducteurs pour un contrôle de position précis. Avantages : Mouvement précis pas à pas Couple de maintien élevé Idéal pour les systèmes de commande numérique Applications : imprimantes 3D, machines CNC, systèmes de caméras Servomoteurs à engrenages Les servomoteurs intégrés aux boîtes de vitesses offrent un couple élevé et un contrôle précis en boucle fermée. Avantages : Haute précision et contrôle de la vitesse Idéal pour une automatisation haute performance Applications : Robotique, CNC, machines d’emballage Classification par orientation de montage Motoréducteurs en ligne Les arbres du moteur et de la boîte de vitesses sont alignés en ligne droite. Avantages : Conception axiale compacte Haute efficacité Applications : Lignes d’assemblage, convoyeurs, machines générales Motoréducteurs à angle droit L’arbre du moteur et l’arbre de sortie sont perpendiculaires, généralement à l’aide d’engrenages coniques ou à vis sans fin. Avantages : Gain de place dans les installations exiguës Transfert de couple fluide dans les configurations angulaires Applications : Ascenseurs, lits médicaux, treuils Classification par disposition des engrenages Motoréducteurs à arbres parallèles Les arbres et les engrenages sont positionnés parallèlement les uns aux autres. Avantages : Profil bas Bonne transmission du couple Applications : Systèmes de convoyage, mélangeurs Motoréducteurs coaxiaux Le moteur et le réducteur partagent un axe commun. Avantages : Conception compacte Haute efficacité Applications : Pompes, soufflantes, machines d’emballage Motoréducteurs à arbre décalé Les arbres sont décalés mais non sécants, souvent utilisés dans les applications compactes. Avantages : Flexibilité de montage Agencements uniques et peu encombrants Applications : Équipements de levage compacts, petits appareils d’automatisation Types spéciaux de motoréducteurs Motoréducteurs miniatures Moteurs à engrenages compacts utilisés dans les applications à espace limité. Caractéristiques: Micro-taille, faible consommation Contrôle précis des mouvements Applications : caméras, serrures intelligentes, appareils portables Motoréducteurs antidéflagrants Conçu pour fonctionner dans des conditions dangereuses. Caractéristiques: Boîtier antidéflagrant Conforme aux normes ATEX ou IECEx Applications : Raffineries de pétrole, usines à gaz, traitement chimique Motoréducteurs à arbre creux L’arbre de sortie est creux, permettant une intégration directe avec les systèmes d’entraînement. Caractéristiques: Montage facile Meilleur alignement et meilleure transmission du couple Applications : Entraînements de bandes transporteuses, boîtes de vitesses modulaires Comment choisir le bon motoréducteur Spécifiez le couple et la vitesse requis Connaître les exigences de charge de votre application est la première étape. Couple : Quelle force de torsion est nécessaire pour déplacer ou maintenir la charge ? Les unités de couple sont généralement Nm ou lb-pi. Vitesse : Déterminer la vitesse de sortie souhaitée (tr/min) après démultiplication. Utilisez cette formule : Couple de sortie = Couple moteur × Rapport de démultiplication × Rendement Conseil : choisissez toujours un moteur qui fournit au moins 20 à 30 % de couple en plus que les besoins réels pour éviter toute surcharge. Choisissez le type d’engrenage Différents types d’engrenages offrent des avantages uniques : Engrenages droits : simples, économiques, mais plus bruyants. Engrenages