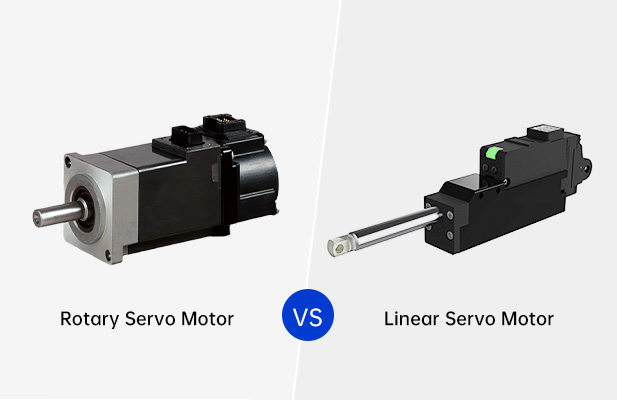
Servomoteur rotatif et servomoteur linéaire : une comparaison complète
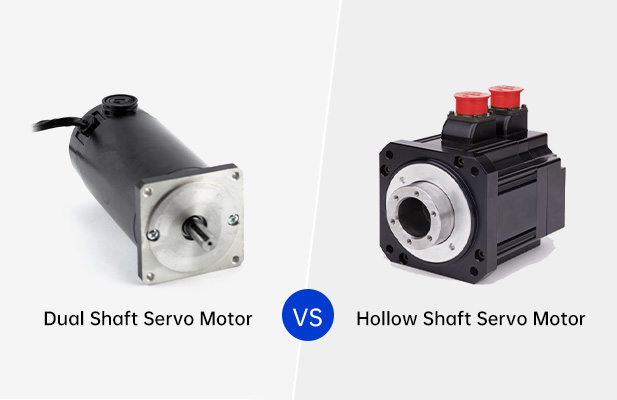
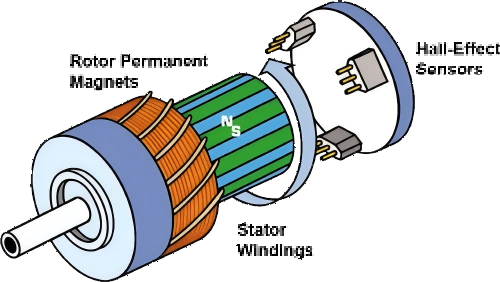
Les servomoteurs se présentent sous de nombreuses formes, les micro-servos rotatifs et linéaires étant les deux types les plus courants. Bien que les deux remplissent des fonctions similaires en termes de contrôle de mouvement, ils diffèrent considérablement en termes de conception, de performances et d’applications. Comprendre les différences entre les servomoteurs rotatifs et les micro-servos linéaires peut aider les ingénieurs, les concepteurs et les amateurs à prendre des décisions éclairées lors du choix du moteur adapté à leurs projets. Cet article explore les caractéristiques, les avantages, les inconvénients et les cas d’utilisation spécifiques des servomoteurs rotatifs et des micro-servos linéaires, offrant une comparaison détaillée qui guidera votre processus de sélection. Parallèlement à cela, nous soulignerons les différences de coût, les facteurs de performance et quelques exemples pratiques pour vous aider à prendre une décision éclairée. Introduction aux servomoteurs La principale différence entre les servomoteurs et les moteurs standard est l’ajout d’un dispositif de rétroaction, tel qu’un encodeur ou un résolveur, qui permet d’obtenir un contrôle en boucle fermée. Cette rétroaction garantit que le moteur fonctionne exactement comme requis, offrant une grande précision dans les tâches de contrôle de mouvement. Les servomoteurs se divisent en deux groupes principaux en fonction du mouvement de leur sortie : Servomoteurs rotatifs : ces moteurs tournent autour d’un axe, fournissant généralement un mouvement de rotation. Micro-servomoteurs linéaires : ces moteurs sont conçus pour produire un mouvement linéaire (en ligne droite) au lieu d’un mouvement de rotation. Servomoteurs rotatifs Un moteur électrique qui tourne sur un seul axe est appelé servomoteur rotatif. Les applications nécessitant un mouvement de rotation l’utilisent fréquemment. Les servomoteurs CA et CC sont les variétés de servomoteurs rotatifs les plus utilisées. Composants clés d’un servomoteur rotatif Moteur (CA/CC) : le composant principal qui génère le mouvement de rotation. Dispositif de rétroaction (encodeur ou résolveur) : fournit une rétroaction au contrôleur pour ajuster la position du moteur. Contrôleur/pilote : l’unité électronique qui contrôle la vitesse, la position et la direction du moteur. Avantages des servomoteurs rotatifs Haute précision et contrôle : les servomoteurs rotatifs offrent un couple élevé et une précision de vitesse, ce qui les rend idéaux pour les applications où un mouvement de rotation précis est essentiel. Français : Large gamme d’applications : ces moteurs sont utilisés dans la robotique, les machines CNC, l’automatisation industrielle, les systèmes de convoyeurs et les applications aérospatiales. Haute efficacité : les servomoteurs rotatifs offrent généralement une efficacité élevée, en particulier dans les applications nécessitant une rotation continue. Variété de tailles et de capacités : les servomoteurs rotatifs sont disponibles dans une large gamme de tailles, ce qui les rend adaptés aux applications à petite et à grande échelle. Inconvénients des servomoteurs rotatifs Limité au mouvement de rotation : bien qu’ils soient parfaits pour les tâches nécessitant un mouvement de rotation, les servomoteurs rotatifs ne peuvent pas fournir de mouvement linéaire sans composants supplémentaires tels que des vis mères ou des boîtes de vitesses. Coût plus élevé : les servomoteurs rotatifs de haute précision, en particulier ceux dotés d’encodeurs ou de systèmes de contrôle spécialisés, peuvent être coûteux par rapport aux moteurs standard. Applications courantes des servomoteurs rotatifs : Robotique : pour un contrôle précis des mouvements des bras robotisés. Machines CNC : pour un positionnement précis dans les processus de fabrication. Portes et fenêtres automatisées : pour le mouvement de rotation dans divers systèmes d’automatisation. Drones et avions : pour contrôler les surfaces de vol. Servomoteurs linéaires Un type de servomoteur qui génère un mouvement linéaire, par opposition au mouvement rotatif, est un micro-servomoteur linéaire. Ces moteurs sont généralement plus petits et fournissent un déplacement linéaire précis et contrôlé. Dans les applications nécessitant un mouvement linéaire petit et précis, les micro-servos linéaires sont fréquemment utilisés. Composants clés d’un servomoteur linéaire Moteur et boîte de vitesses : le moteur entraîne l’actionneur linéaire via une boîte de vitesses ou une vis mère. Dispositif de rétroaction : comme les servomoteurs rotatifs, les micro-servos linéaires comportent souvent des dispositifs de rétroaction tels que des potentiomètres ou des encodeurs. Contrôleur/pilote : comme les servomoteurs rotatifs, le contrôleur régule le mouvement linéaire en fonction de la rétroaction. Avantages des servomoteurs linéaires Mouvement linéaire : idéal pour les applications nécessitant un mouvement en ligne droite, comme dans les petits actionneurs, les glissières linéaires ou le contrôle des vannes. Taille compacte : les micro-servos linéaires sont généralement plus petits que leurs homologues rotatifs, ce qui les rend adaptés aux espaces confinés ou aux appareils plus petits. Contrôle de précision : offre une excellente précision dans les petits mouvements, ce qui est particulièrement utile dans les tâches délicates, telles que le réglage de la mise au point dans les caméras ou le contrôle de petits bras robotisés. Facilité d’intégration : les micro-servos linéaires sont relativement faciles à intégrer dans des conceptions qui nécessitent un mouvement en ligne droite sans pièces mécaniques supplémentaires telles que des vis mères ou des rails. Inconvénients des servomoteurs linéaires Force et longueur de course limitées : par rapport aux moteurs rotatifs, les servomoteurs linéaires ont généralement une longueur de course limitée et peuvent ne pas fournir autant de force sur de longues distances. Efficacité inférieure : les micro-servos linéaires peuvent être moins efficaces que les moteurs rotatifs dans certaines applications, en particulier lorsqu’une puissance élevée ou de longues longueurs de course sont requises. Applications courantes des servomoteurs linéaires Petite robotique : utilisé dans les petits actionneurs robotiques pour le mouvement linéaire. Systèmes de caméra : pour contrôler la mise au point de l’objectif ou le zoom dans les caméras. Prototypage : utilisé dans les prototypes ou les modèles nécessitant un déplacement linéaire précis. Dispositifs médicaux : utilisés dans les équipements médicaux qui nécessitent des mouvements linéaires petits et précis, tels que dans les systèmes d’administration de médicaments. Principales différences entre les servomoteurs rotatifs et les servomoteurs linéaires Caractéristique Moteur Servo Rotatif Moteur Servo Linéaire Type de mouvement Mouvement rotatif autour d’un axe. Mouvement linéaire (en ligne droite). Applications Robotique, CNC, systèmes de convoyage. Petits robots, systèmes de caméras, actionneurs. Taille Varie de petite à grande taille. Généralement plus petit