Les servomoteurs sont parfaits pour les systèmes nécessitant de grandes performances en raison de leur capacité à contrôler précisément la position, la vitesse et le couple. Cependant, le contrôle des servomoteurs est un processus complexe et diverses méthodes de contrôle sont utilisées pour obtenir des performances optimales en fonction d’exigences spécifiques. Dans cet article, nous allons explorer cinq méthodes de contrôle courantes pour les servomoteurs, en discutant de leurs caractéristiques, de leurs avantages et des scénarios d’utilisation optimale. Nous inclurons également quelques graphiques pour vous aider à comprendre plus clairement les différences entre ces méthodes de contrôle.
Contrôle en boucle ouverte
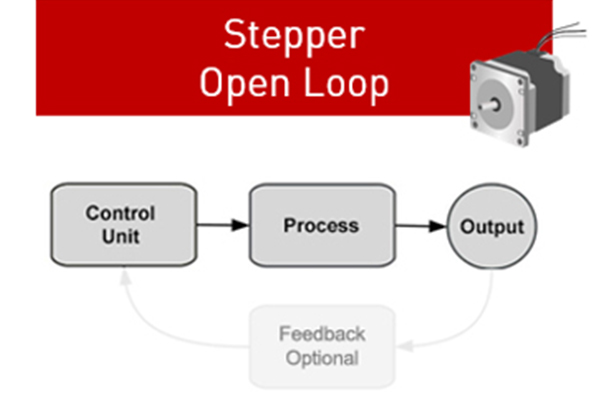
Le contrôle en boucle ouverte est la forme la plus simple de contrôle des servomoteurs. Dans ce système, le moteur reçoit des commandes basées sur des valeurs prédéfinies, telles que la vitesse, la position ou le couple, sans aucun mécanisme de rétroaction. Pour effectuer une tâche, le contrôleur envoie un signal au servomoteur, qui réagit en fonction de cette entrée. Dans le contrôle en boucle ouverte, il n’y a pas de surveillance continue des performances du moteur. Par conséquent, s’il y a des changements dans le système ou des perturbations (comme des variations de charge ou de frottement), le moteur peut ne pas être en mesure de s’adapter en conséquence.
FrançaisFonctionnalités et avantages
- Simplicité : les systèmes de contrôle en boucle ouverte sont simples et faciles à mettre en œuvre, car ils ne nécessitent pas de capteurs de rétroaction ni d’algorithmes complexes.
- Rentable : comme il n’y a pas besoin de capteurs supplémentaires, le coût du système est inférieur à celui des systèmes en boucle fermée.
- Adapté aux applications à faible demande : le contrôle en boucle ouverte fonctionne bien dans les applications où la précision n’est pas critique et les perturbations externes sont minimes.
Restrictions
- Aucun retour d’information : le plus gros inconvénient du contrôle en boucle ouverte est qu’il ne compense pas les erreurs de position, de vitesse ou de couple.
- Performances irrégulières : dans les cas où il y a des changements de charge ou de forces externes, le moteur peut ne pas fonctionner comme prévu.
Cas d’utilisation
- Petits systèmes robotiques ou d’automatisation.
- Applications avec de faibles exigences de précision.
- Projets de loisirs ou configurations pédagogiques.
| Type de Contrôle | Complexité du Système | Coût | Précision de Position | Rétroaction Utilisée |
| Contrôle en Boucle Ouverte | Faible | Faible | Faible | Non |
| Contrôle en Boucle Fermée | Élevée | Élevé | Élevée | Oui |
Contrôle en boucle fermée (contrôle par rétroaction)
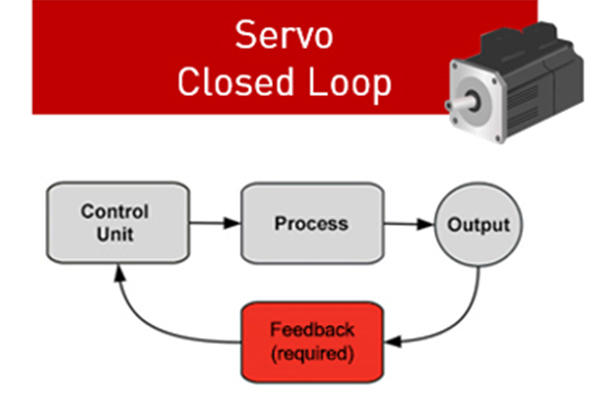
Une technique plus sophistiquée de gestion des servomoteurs est le contrôle en boucle fermée, parfois appelé contrôle par rétroaction. Dans un système en boucle fermée, des dispositifs de rétroaction tels que des encodeurs, des résolveurs ou des tachymètres sont utilisés pour surveiller la position, la vitesse ou le couple du moteur. En fonction de la différence, appelée signal d’erreur, le contrôleur ajuste les performances du moteur en temps réel pour obtenir la sortie souhaitée. Ce mécanisme de rétroaction continue garantit que le moteur s’ajuste pour maintenir une position, une vitesse et un couple précis.
Caractéristiques et avantages
- Précision : les systèmes en boucle fermée offrent une grande précision et peuvent compenser les variations de charge, de frottement et de conditions environnementales.
- Adaptabilité : la rétroaction permet au système de s’adapter aux changements de charge ou à toute perturbation inattendue, ce qui rend le système plus robuste.
- Haute efficacité : le contrôle en boucle fermée minimise le gaspillage d’énergie, car le moteur peut ajuster son comportement pour répondre aux besoins du système.
Limitations
- Complexité : les systèmes de contrôle en boucle fermée nécessitent des composants supplémentaires tels que des encodeurs et des contrôleurs, ce qui les rend plus complexes et plus coûteux que les systèmes en boucle ouverte.
- Coût plus élevé : en raison du besoin de mécanismes de rétroaction et de contrôleurs plus sophistiqués, les systèmes de contrôle en boucle fermée sont plus chers.
Cas d’utilisation
- Systèmes d’automatisation industrielle.
- Machines CNC et robotique.
- Les applications telles que les équipements médicaux exigent un niveau de précision élevé.
| Paramètre | Contrôle en Boucle Ouverte | Contrôle en Boucle Fermée |
| Mécanisme de Rétroaction | Aucun | Rétroaction Continue |
| Précision | Faible | Élevée |
| Complexité du Système | Simple | Complexe |
| Coût | Faible | Élevé |
| Adapté pour | Tâches à faible demande | Tâches de haute précision |
Contrôle de position
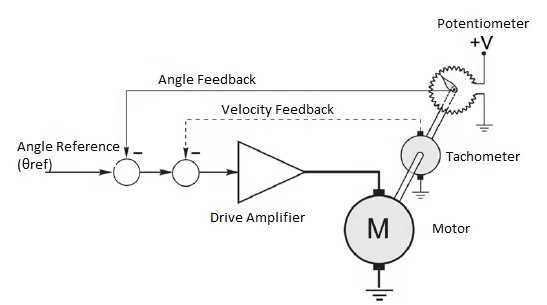
Le contrôle de position se concentre sur le contrôle précis de la position d’un servomoteur. Dans cette méthode, le contrôleur envoie un signal au moteur pour qu’il se déplace vers une position spécifique, et le mécanisme de rétroaction garantit que le moteur atteint et maintient cette position. Les applications telles que les robots et les machines CNC qui exigent un placement exact dépendent fortement de ce système. Dans le contrôle de position, le contrôleur surveille en permanence la position du moteur et ajuste le signal d’entrée pour corriger tout écart par rapport à la position cible. Cette méthode est souvent mise en œuvre en combinaison avec un contrôle en boucle fermée pour une précision améliorée.
Caractéristiques et avantages
Haute précision : offre un positionnement très précis, ce qui le rend idéal pour la robotique, la fabrication automatisée et les applications médicales.
Ajustement en temps réel : le moteur peut s’ajuster en continu pour atteindre la position exacte même en cas de changements de charge ou de perturbations.
Polyvalence : fonctionne bien dans les applications qui nécessitent un positionnement angulaire ou linéaire spécifique.
Limites
- Configuration complexe : nécessite des dispositifs de rétroaction précis (tels que des encodeurs) et des algorithmes pour contrôler le mouvement du moteur avec précision.
- Coût plus élevé : le système est plus coûteux car il nécessite plus de capteurs et de commandes.
Cas d’utilisation
- Machines CNC et imprimantes 3D.
- Bras robotisés et systèmes de pick-and-place automatisés.
- Processus de fabrication de précision.
| Méthode de Contrôle | Objectif Principal | Précision | Contrôle de Vitesse | Compensation de Charge |
| Contrôle de Position | Précision de Position | Élevée | Limitée | Élevée |
| Contrôle de Vitesse | Régulation de Vitesse | Modérée | Élevée | Modérée |
Contrôle de vitesse
Dans le contrôle de vitesse, la vitesse du moteur est ajustée en modifiant le signal d’entrée pour maintenir une vitesse constante malgré les variations de charge ou d’autres perturbations. Le contrôle de vitesse est essentiel pour les applications où le maintien d’une vitesse constante est plus important que la précision de la position.
Dans de nombreux cas, le contrôle de vitesse est combiné à d’autres méthodes de contrôle, telles que le contrôle en boucle fermée, pour garantir que le moteur maintient la vitesse souhaitée et s’adapte aux variations de charge.
Caractéristiques et avantages
- Cohérence : le contrôle de vitesse garantit que le moteur fonctionne à une vitesse constante, même lorsque la charge fluctue.
- Efficacité : réduit la consommation d’énergie dans les applications où le maintien de la vitesse est plus critique que la précision de la position.
- Simplicité : il est plus simple à mettre en œuvre que le contrôle de position, ce qui le rend plus rentable dans certaines applications.
Limitations
- Manque de précision de positionnement : le contrôle de vitesse est axé sur le maintien de la vitesse, et non sur la position du moteur, ce qui le rend moins adapté aux applications de précision.
- Moins robuste : peut avoir du mal à maintenir les performances face à des perturbations externes importantes, telles que des changements de charge importants.
Cas d’utilisation
- Convoyeurs à bande, ventilateurs et pompes.
- Applications où un mouvement continu sans précision de positionnement est requis.
- Systèmes CVC et applications industrielles à faible charge.
| Méthode de Contrôle | Objectif Principal | Précision | Efficacité | Type d’Application |
| Contrôle de Vitesse | Régulation de Vitesse | Modérée | Élevée | Convoyeurs, Ventilateurs |
| Contrôle de Couple | Régulation de Couple | Élevée | Modérée | Tâches sensibles au charge |
Contrôle du couple
Le contrôle du couple se concentre sur la régulation du couple de sortie d’un servomoteur. Dans cette méthode, le moteur ajuste son courant pour maintenir un couple spécifique, quelle que soit la vitesse ou la position. Le contrôle du couple est essentiel pour les applications où une force ou un couple constant est plus important que le maintien d’une vitesse ou d’une position spécifique. Le contrôle du couple est couramment utilisé dans les machines de test, les presses et les systèmes nécessitant un contrôle précis de la force.
Caractéristiques et avantages
- Contrôle de la force : idéal pour les applications nécessitant un contrôle précis de la force, comme dans les tests de matériaux ou les processus de fabrication.
- Sensibilité de charge : le moteur peut s’adapter à des charges variables en ajustant la sortie de couple, garantissant des performances constantes.
- Flexibilité : convient aux applications où le contrôle de la vitesse ou de la position n’est pas aussi important que la force exercée.
Limitations
- Configuration complexe : nécessite une détection de couple précise et des contrôleurs sophistiqués pour réguler efficacement le couple.
- Précision inférieure : bien qu’il excelle dans le contrôle du couple, il est moins efficace pour les applications qui nécessitent une grande précision de position ou de vitesse.
Cas d’utilisation
- Bancs d’essai, machines d’essai de matériaux et presses.
- Les bras robotisés nécessitent un retour de force.
- Les lignes d’assemblage automatisées qui nécessitent une application précise de la force.
| Méthode de Contrôle | Objectif Principal | Précision | Contrôle de Force | Adapté Pour |
| Contrôle de Couple | Régulation de Couple | Modérée | Élevé | Tests de matériaux |
| Contrôle de Position | Précision de Position | Élevée | Faible | Robotique, CNC |
Les exigences particulières de votre application jouent un rôle majeur dans la détermination de la meilleure stratégie de contrôle pour un servomoteur. Que vous recherchiez une précision de positionnement, une vitesse constante ou un contrôle exact du couple, chaque méthode offre des avantages et des compromis distincts. Pour que votre système fonctionne de la manière la plus efficace possible, les fabricants de servomoteurs doivent comprendre les différences entre ces techniques de contrôle.
