Los servomotores son partes cruciales de muchas aplicaciones, incluidas la automatización, la robótica, la maquinaria CNC y la fabricación. Para garantizar un rendimiento óptimo, una buena relación calidad-precio y una eficiencia energética óptima, es fundamental seleccionar el tamaño adecuado de servomotor. Esta guía ofrece una descripción detallada de los tamaños de servomotores, sus especificaciones y cómo seleccionar el adecuado para su aplicación.
¿Qué es un servomotor?
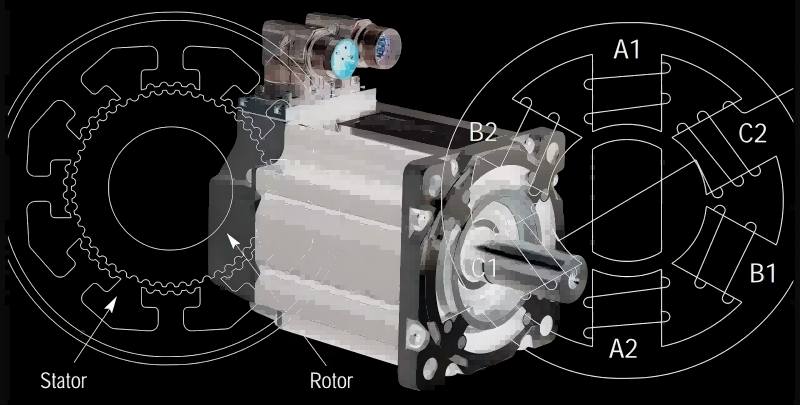
Un servomotor es un tipo de actuador lineal o rotatorio que permite un control preciso de la aceleración, la velocidad y la posición angular. Un motor y un sensor de retroalimentación están acoplados para un control de bucle cerrado. Las industrias que necesitan un posicionamiento preciso y un control de velocidad hacen un uso extensivo de los servomotores.
Características principales:
- Alta precisión
- Tiempo de respuesta rápido
- Diseño compacto
- Par y velocidad personalizables
¿Por qué son importantes los tamaños de los servomotores?
El tamaño de un servomotor afecta su par, velocidad y capacidad para funcionar bajo carga. Elegir un motor de tamaño incorrecto puede provocar:
- Subdimensionamiento: par insuficiente, sobrecalentamiento y reducción de la vida útil.
- Sobredimensionamiento: costo innecesario, mayores requisitos de espacio e ineficiencia.
Para garantizar un rendimiento óptimo, es fundamental comprender las clasificaciones de tamaño de los motores y sus especificaciones.
Clasificación de servomotores por tamaño
Los servomotores vienen en una variedad de tamaños, que van desde motores en miniatura para pequeños dispositivos electrónicos hasta grandes motores utilizados en maquinaria industrial. El dimensionamiento de un servomotor depende de varios factores, entre ellos:
- Requisitos de par: la cantidad de par necesaria para mover o sostener una carga.
- Requisitos de velocidad: la velocidad a la que debe funcionar el motor.
- Inercia de la carga: la resistencia de la carga a los cambios de movimiento.
- Tipo de aplicación: si el motor se utilizará para posicionamiento, movimiento continuo o ambos.
Factores clave en el dimensionamiento de un servomotor
Comprender su aplicación y las capacidades del motor es esencial para dimensionar correctamente el servomotor. Las consideraciones principales son las siguientes:
Esfuerzo de torsión
Los servomotores se clasifican por su par de salida, que generalmente se expresa en Newton-metros (Nm) u onzas-pulgadas (oz-in). El par necesario para su aplicación determina el tamaño del motor.
- Par continuo: el par que un motor puede entregar de forma continua sin sobrecalentarse.
- Par máximo: el par más alto que un motor puede producir durante breves períodos de tiempo.
Velocidad
La velocidad del motor generalmente se mide en revoluciones por minuto (RPM). Las aplicaciones que requieren movimientos de alta velocidad pueden necesitar motores más pequeños y livianos con capacidades de RPM más altas.
Potencia
El producto del par y la velocidad angular se utiliza para calcular la potencia. Para aplicaciones que necesitan mayor potencia, podrían requerirse servomotores más grandes.
Dimensiones físicas
Los servomotores están disponibles en diferentes tamaños físicos, a menudo determinados por el tamaño del bastidor. Los tamaños de bastidor comunes se basan en estándares de la industria, como los tamaños NEMA (Asociación Nacional de Fabricantes Eléctricos).
Tamaños comunes de servomotores
A continuación, se muestra un desglose de los tamaños comunes de servomotores y sus aplicaciones típicas:
| Tamaño del motor servo | Rango de par | Rango de velocidad | Aplicaciones típicas |
| Micro | < 0,1 Nm | 1000–5000 RPM | Pequeños robots, drones, proyectos de hobby |
| Pequeño | 0,1–1 Nm | 1000–6000 RPM | Dispositivos médicos, impresoras 3D, máquinas CNC |
| Medio | 1–10 Nm | 500–3000 RPM | Robots industriales, máquinas de embalaje |
| Grande | > 10 Nm | 100–1500 RPM | Maquinaria pesada, sistemas de transportadores |
Par frente a velocidad: comprensión de la compensación
Los servomotores funcionan dentro de una compensación entre par y velocidad. Cuanto más rápido funciona un motor, menos par puede proporcionar. Por el contrario, los motores que proporcionan un par alto suelen tener velocidades máximas más bajas. Esta relación se representa normalmente en una curva de par-velocidad.
Ejemplo de curva de par-velocidad
A continuación, se muestra una representación general de una curva de par-velocidad para un servomotor:
- Región 1: par continuo a velocidades más bajas.
- Región 2: par máximo durante períodos breves.
- Región 3: par reducido a altas velocidades.
| Velocidad (RPM) | Torque (Nm) |
| 500 | 10 |
| 1000 | 8 |
| 2000 | 6 |
| 3000 | 4 |
| 4000 | 2 |
Ejemplo de dimensionamiento: selección de un servomotor para una máquina CNC
Imagina que estás diseñando una máquina CNC que requiere lo siguiente:
- Inercia de carga: 0,02 kg·m²
- Velocidad: 1500 RPM
- Torque continuo: 3 Nm
- Torque máximo: 6 Nm
Usando estos parámetros, harías lo siguiente:
- Selecciona el rango de velocidad: elige un motor capaz de alcanzar al menos 1500 RPM.
- Comprueba los requisitos de torque: busca un motor que proporcione un torque continuo de 3 Nm y un torque máximo de 6 Nm.
- Inercia equivalente: asegúrate de que la inercia del motor coincida o sea ligeramente superior a la inercia de carga para lograr estabilidad.
Para este ejemplo, un servomotor de tamaño mediano probablemente sería adecuado.
Tabla de dimensionamiento de servomotores NEMA
Para simplificar el proceso de selección, aquí se incluye una tabla general que muestra los tamaños típicos de servomotores y sus especificaciones:
| Tamaño del marco | Par continuo (Nm) | Par máximo (Nm) | Velocidad (RPM) | Aplicaciones |
| NEMA 17 | 0,2–0,5 | 0,5–1,0 | 3000–5000 | Robots pequeños, impresoras 3D |
| NEMA 23 | 0,5–2,0 | 2,0–4,0 | 1000–3000 | Máquinas CNC, empaquetado |
| NEMA 34 | 2,0–8,0 | 8,0–16,0 | 500–1500 | Automatización industrial, robots |
| Personalizado Grande | > 8,0 | > 16,0 | 100–500 | Correas transportadoras, levantamiento pesado |
Pasos para elegir el tamaño correcto de servomotor
- Defina los requisitos de la aplicación: determine el par, la velocidad y la inercia de la carga.
- Revise las especificaciones del motor: compare las especificaciones de los motores disponibles con sus requisitos.
- Considere las limitaciones físicas: para asegurarse de que el motor funcionará con su máquina, verifique sus dimensiones físicas.
- Ejecute simulaciones: utilice herramientas de simulación o software para verificar el rendimiento del motor en las condiciones de funcionamiento esperadas.
- Evalúe los factores ambientales: considere la disipación de calor, la vibración y los requisitos de montaje.
Beneficios de un dimensionamiento adecuado del servomotor
- Eficiencia: evita el desperdicio de energía y el sobrecalentamiento.
- Rentabilidad: reduce los costos iniciales y operativos.
- Confiabilidad: garantiza un funcionamiento a largo plazo sin fallas.
- Rendimiento: ofrece un control y una precisión precisos.
Tendencias futuras en el diseño de servomotores
A medida que la tecnología evoluciona, los servomotores se vuelven más pequeños, más potentes y energéticamente eficientes. Las tendencias clave incluyen:
- Miniaturización: microservomotores con mayor par para aplicaciones compactas.
- Integración: controladores integrados para funcionalidad plug-and-play.
- Eficiencia energética: diseños mejorados que reducen el consumo de energía.
Conclusión
Elegir el tamaño correcto del servomotor es un paso fundamental para diseñar un sistema eficiente y rentable. Comprender la relación entre el tamaño, el par y los requisitos de la aplicación garantiza un rendimiento óptimo. Si tiene en cuenta factores como los requisitos de carga, las condiciones ambientales y la compatibilidad del sistema, y consulta con un fabricante de servomotores de confianza, puede seleccionar un servomotor que satisfaga sus necesidades específicas.
