Los motores BLDC (DC sin escobillas) Outrunner se utilizan ampliamente en drones, aeronaves RC, robótica de aficionados y bicicletas eléctricas gracias a su alta relación par-peso y eficiencia. Un componente fundamental de cualquier sistema que utilice motores BLDC es el controlador electrónico de velocidad (ESC), la interfaz entre las señales de control (como PWM u otros protocolos) y la potencia suministrada al motor.
Elegir el ESC adecuado implica comprender su funcionamiento, los métodos de control que admiten (PWM vs. FOC), los valores nominales de voltaje y corriente, y otras características como la telemetría, la refrigeración y el firmware. En esta guía, aprenderá sobre:
- Principios de funcionamiento del ESC
- Métodos de control: PWM vs FOC
- Consideraciones sobre el voltaje
- Clasificaciones de corriente y corriente continua vs. corriente pico
- Eficiencia y gestión térmica
- Características adicionales
- Lista de verificación de selección y tablas de comparación
- Ejemplo de emparejamientos de ESC y motor
- Resumen y recomendaciones
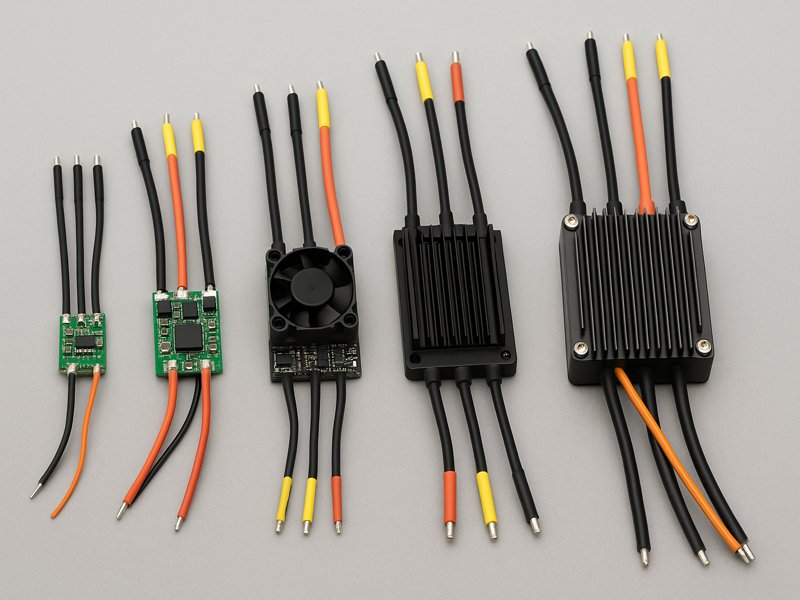
Funcionamiento del ESC: conceptos básicos
Un ESC toma una entrada de control de bajo voltaje (como PWM de un controlador de vuelo) y conmuta CC de alto voltaje a los devanados trifásicos de un motor BLDC en una secuencia específica para girarlo. Esto implica:
- Conmutación MOSFET de alta velocidad para impulsar fases
- Lógica de conmutación para decidir qué fases alimentar
- Detección (fuerza contraelectromotriz o sensores) para retroalimentación de posición
- Circuitos de protección contra sobretensión, sobrecorriente y corte por baja tensión (LVC)
Métricas clave:
- Clasificación de voltaje (V): voltaje máximo de batería que ESC puede soportar
- Corriente continua (A): corriente que el ESC puede mantener indefinidamente, limitada por el enfriamiento
- Corriente de ráfaga (A): capacidad de corriente alta de corta duración (p. ej., 10 segundos)
- Método de control: PWM (seis pasos) o FOC (control orientado al campo)
- Firmware: por ejemplo, BLHeli, KISS, VESC, firmware FOC especializado
Métodos de control: PWM vs FOC
Control PWM / “Seis pasos”
Método tradicional: el ESC impulsa el motor con conmutación de seis pasos.
Más simple, menos sobrecarga computacional, pero:
- Produce una forma de onda escalonada: más ondulación y ondulación de torque.
- Sin control vectorial de corriente óptimo → ligeramente menos eficiente, más ruidoso.
FOC (Control Orientado al Campo)
Implementa control vectorial para impulsar el motor según la orientación del campo rotor/estator en tiempo real.
Entrega:
- Par y rotación extremadamente suaves.
- Menor ruido eléctrico, menor calentamiento del motor.
- Mayor eficiencia, especialmente a bajas RPM y cargas parciales.
Requiere más potencia de procesamiento y, a veces, detección de corriente y voltaje (como los ESC basados en VESC).
Tabla comparativa
| Característica | PWM (seis pasos) | FOC (Control Orientado al Campo) |
| Conmutación | Seis pasos | Vector (sinusoidal) |
| Suavidad | Moderado; ondulación del par | Muy suave, mínima ondulación del par |
| Eficiencia | Bueno, menos a bajas RPM | Excelente en un amplio rango de RPM |
| Ruido (audible) | Más alto (zumbido) | Más silencioso |
| Complejidad / Costo | Más bajo | Superior (requiere microcontrolador avanzado, sensores) |
| Ejemplos de firmware | BLHeli, KISS (no FOC) | VESC, BLHeli_S (FOC), FOC personalizado |
Consideraciones de voltaje
La clasificación de voltaje del ESC debe coincidir con los requisitos de voltaje de la batería y del motor:
- Clasificaciones ESC comunes: LiPo de 2S a 6S (de 7,4 V a 22,2 V), o en bicicletas eléctricas o para aficionados: 24 V, 36 V, 48 V, etc.
- El margen es esencial: elija un ESC con una clasificación levemente superior al voltaje nominal de la batería para adaptarse a los picos de voltaje y al sobreimpulso.
Ejemplos de voltaje y batería
| Solicitud | Tipo de batería | Voltaje nominal | Clasificación de voltaje ESC |
| Mini dron | Batería de polímero de litio 3S | ≈11,1 V | 3 S–4 S (12 V–16,8 V) |
| Dron de carreras FPV | Baterías LiPo 4S | ≈14,8 V | 4 S–5 S (16,8 V–21 V) |
| Bicicleta eléctrica / Scooter | Paquete de iones de litio | ≈36 V | 36 V–48 V |
| e-Rover más grande | Paquete de iones de litio | ≈48 V | 48 V–60 V |
Asegúrese siempre que el voltaje máximo nominal del ESC supere el voltaje pico bajo carga (LiPo completamente cargada ~4,2 V por celda).
Clasificaciones de corriente: Corriente continua vs. corriente de ráfaga
Seleccionar la clasificación actual es quizás la parte más crítica.
- Corriente continua: la corriente máxima que el ESC puede soportar indefinidamente (generalmente con un enfriamiento adecuado).
- Corriente de ráfaga: clasificación de corto plazo, por ejemplo, 5 a 10 segundos.
Compare siempre la clasificación ESC con el consumo de corriente esperado de su motor en sus condiciones de funcionamiento.
Ejemplo de datos de corriente del motor
Supongamos que un motor BLDC de salidaTiene estos consumos de corriente medidos:
| Condición de carga | Voltaje | Consumo de corriente |
| Ralentí (sin carga) | 12 V | 0,5 A |
| Flotar / carga ligera | 12 V | 10 A |
| Aceleración máxima / pesada | 12 V | 20 A |
| Parar | 12 V | 25 A |
En este caso, el ESC debería:
- Mantener al menos 20 A continuos
- Manejar ráfagas de 25 A para seguridad y arranque
Tabla de valores nominales de corriente del ESC (modelos de ejemplo)
| Modelo ESC | Voltaje (S LiPo) | Corriente continua | Corriente de ráfaga | Tipo de control |
| ESC-A (presupuesto) | 2–4 S | 20 A | 25 A (5 s) | PWM |
| ESC-B (rango medio) | 3–6 S | 30 A | 40 A (10 s) | PWM/FOC |
| ESC-C (alta gama) | 4–6 S | 40 A | 60 A (10 s) | Solo FOC |
| ESC-D (estilo bicicleta eléctrica) | 10S (~36 V) | 100 A | 150 A (10 s) | FUEGO |
Eficiencia y gestión térmica
El calor es el peor enemigo de tu ESC. La eficiencia y las estrategias de refrigeración afectan drásticamente el rendimiento y la durabilidad.
Diferencias de eficiencia: Los ESC FOC suelen funcionar entre un 2 % y un 5 % más eficientemente con carga parcial. En un sistema de 12 V que consume 20 A (240 W), un ahorro del 5 % supone una reducción significativa de 12 W en el calor.
Métodos de enfriamiento:
- Pasivo: disipadores de calor de aluminio, flujo de aire.
- Activo: ventiladores integrados o complementarios
- Refrigeración líquida: para instalaciones de alta potencia
| Tipo de ESC | Método de enfriamiento | Aumento típico de la temperatura | Comentario |
| ESC PWM económico | Aletas pasivas + flujo de aire | +30 °C | Puede requerir flujo de aire externo |
| ESC FOC de rango medio | Aletas + ventilador pequeño | +20 °C | Mejor rendimiento en condiciones de alta carga |
| ESC FOC de alta gama | Aletas grandes + ventilador | +10 °C | Rara vez hay estrangulamiento térmico |
Características adicionales a considerar
Soporte de telemetría: capacidad de informar RPM, corriente, voltaje y temperatura a su controlador de vuelo.
BEC (circuito eliminador de batería): regulador integrado de 5 V/6 V para alimentar la radio/receptor:
Clasificado en amperios: p. ej., 2 A, 3 A.
Programabilidad: a través de enlace USB, Bluetooth o interfaz de cursor dedicada.
Asistencia de frenado: útil en bicicletas eléctricas y robótica.
Modos de arranque: arranque suave, frenado activo, freno a cero, ajuste de sincronización del motor.
Soporte de firmware:
- BLHeli: común para drones multirotor, generalmente admite variantes PWM y FOC
- Firmware VESC: ampliamente utilizado en patines eléctricos, robótica y ajuste avanzado de FOC.
Lista de verificación y comparación de selección de ESC
Lista de verificación de selección de ESC
- Compatibilidad de voltaje: voltaje máximo del ESC > voltaje máximo de la batería
- Capacidad de corriente: Continua ≥ consumo en estado estable; Ráfaga ≥ arranque/bloqueo y picos de corriente
- Método de control: PWM si es sensible al costo; FOC para eficiencia, ruido y suavidad
- Solución de refrigeración: fusionar la ruta de calor con el perfil de carga del motor
- Características deseadas: telemetría, BEC, programación, frenado, manejo de arranque.
- Factor de forma y peso: importantes para drones y plataformas móviles
- Firmware y soporte de la comunidad: disponibilidad de ajustes, actualizaciones, documentación
Tabla comparativa de muestra
| Modelo ESC | Tensión | Corriente continua | Corriente de ráfaga | Tipo de control | Enfriamiento | Telemetría | BEC | Notas |
| ESC-A | 2–4 S | 20 A | 25 A | MLI | Aletas pasivas | No | 5 V/2 A | ESC para drones económicos |
| ESC-B | 3–6 S | 30 A | 40 A | PWM/FOC | Ventilador pequeño | Sí | 5 V/3 A | De gama media, preparado para multicópteros |
| ESC-C | 4–6 S | 40 A | 60 A | FUEGO | Ventilador + aletas | Sí | 6 V/3 A | FOC suave y de calidad de competición |
| ESC-D (bicicleta eléctrica) | 10 S | 100 A | 150 A | FUEGO | Aletas grandes + ventilador | Sí | No | Sistemas de bicicletas eléctricas de alto par |
Ejemplos de emparejamientos: motor y ESC
Ejemplo 1: Mini dron de carreras
- Motor: tamaño 2205, KV 2300, consume ~15 A a máxima aceleración con batería de 4 S
- Batería: 4 S LiPo (nominal 14,8 V, pico ~16,8 V)
- ESC: Necesita ≥ 20 A continuos, ~25 A en ráfaga, nominal de 5 S para sobrecarga; control suave → ESC-B (3–6 S, 30 A continuos, 40 A en ráfaga, PWM/FOC, ventilador pequeño)
Ejemplo 2: Motor de accionamiento de una bicicleta eléctrica
- Motor: Buje con engranajes Outrunner, consume 60 A en potencia máxima y 30 A en modo crucero con batería de 36 V (10 S)
- Batería: nominal 36 V (~42 V pico)
- ESC: Necesita ≥ 30 A de corriente continua, ≥ 60 A de ráfaga; se prefiere FOC para suavidad y regeneración. ESC-D (10 S, 100 A de corriente continua) es adecuado.
Ejemplo 3: Barco RC con carga pesada
- Motor: Motor de gran cilindrada, consume 25 A continuos, 50 A de pico en 6 S
- Batería: 6 S LiPo (22,2 V nominales, 25,2 V pico)
- ESC: Necesita ≥ 30 A continuos, ≥ 60 A en ráfaga; el FOC ofrece un funcionamiento más silencioso en motos acuáticas. Elija ESC-C (4–6 S, 40 A continuos, 60 A en ráfaga, FOC)
Notas sobre la coincidencia de datos de especificaciones del ESC y del motor
Calcule la corriente aproximada del motor a través de la hoja de datos del motor o midiendo con un tacómetro y un vatímetro.
El calor del motor y del ESC deben estar dentro de límites seguros: controle las temperaturas de los componentes durante las pruebas iniciales.
Tenga en cuenta la caída de voltaje bajo carga: las celdas pueden caer de 4,2 V a 3,7 V o menos; elija el margen ESC en consecuencia.
Actualizar su ESC (y aprovechar el FOC) puede mejorar la vida útil de la batería, reducir el calor y hacer que el acelerador se sienta más sensible.
Resumen y recomendaciones
Los ESC PWM son rentables y perfectos para muchas aplicaciones: elija un modelo con suficiente voltaje y corriente nominal.
Vale la pena el costo adicional de los ESC FOC para un funcionamiento más suave y eficiente, especialmente para robótica, bicicletas eléctricas, barcos y aplicaciones ruidosas o de precisión.
Siempre sobreespecifique el voltaje y la corriente para garantizar la confiabilidad y el margen térmico.
Las características requeridas (telemetría, BEC, frenado) deben reflejar su sistema de control y sus necesidades de conveniencia.
Utilice las tablas de emparejamiento de ejemplo anteriores como plantillas para seleccionar ESC para sus proyectos BLDC outrunner.