Los motores eléctricos, conocidos como motores paso a paso, se emplean con frecuencia en aplicaciones que requieren un control exacto de la posición, la velocidad y la dirección de rotación. Se diferencian de los motores de corriente continua habituales en que se mueven en pasos discretos, lo que proporciona un control más preciso del movimiento del motor.
¿Qué es un motor paso a paso?
Cada paso es una rotación angular del eje del motor, y el motor puede controlarse para que gire en una cantidad determinada de pasos. Estos motores están diseñados para girar una cantidad fija, generalmente en el rango de 0,9° a 1,8° por paso, según el diseño del motor.
La capacidad de los motores paso a paso para lograr un control preciso sin la necesidad de sistemas de retroalimentación es su principal ventaja sobre otros tipos de motores (como los motores de CC con escobillas). Los motores paso a paso se controlan normalmente enviando una secuencia de pulsos eléctricos a los devanados del motor, y cada pulso hace que el motor se mueva un paso hacia adelante o hacia atrás.
Tipos de motores paso a paso
Antes de sumergirnos en las técnicas de control, es importante comprender los diferentes tipos de motores paso a paso, ya que afectan la forma en que se controla el motor:
Motores paso a paso de imán permanente (PM):
- Con un imán permanente en el rotor, estos motores ofrecen un mayor par y eficiencia a velocidades reducidas.
- Son el tipo más común de motor paso a paso y son ideales para aplicaciones de baja velocidad.
Motores paso a paso de reluctancia variable (VR):
- En estos motores, el rotor está hecho de hierro dulce y el movimiento del rotor está guiado por los cambios de reluctancia magnética cuando se activa el estator.
- En comparación con los motores de imán permanente, tienen un par menor pero una mejor capacidad de velocidad.
Motores paso a paso híbridos:
- Estos combinan las características de los motores paso a paso VR y PM. El alto par, la precisión y la velocidad se equilibran con ellos.
- Los motores paso a paso híbridos son los más utilizados en aplicaciones industriales.
Principios básicos del control de motores paso a paso
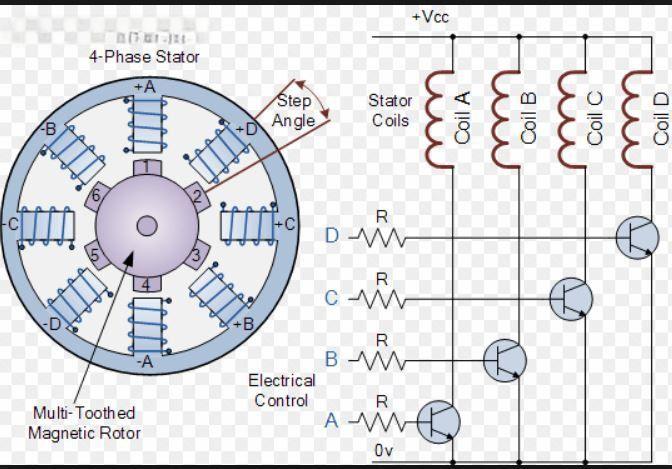
Los motores paso a paso se basan en un conjunto de devanados dispuestos en un estator para generar campos magnéticos. El movimiento se crea por la interacción de estos campos con el rotor o el componente giratorio. Por lo general, con un imán permanente o un trozo de hierro dulce, el rotor se mueve de forma incremental a medida que los devanados del estator se activan en un orden particular.
Hay varios conceptos clave que se deben comprender al controlar un motor paso a paso:
Ángulo de paso:
El ángulo de paso define cuánto se mueve el rotor con cada paso. Por ejemplo, si un motor paso a paso tiene un ángulo de paso de 1,8°, el rotor del motor se moverá 1,8° por cada pulso.
La rotación total del motor se puede determinar dividiendo 360° por el ángulo de paso. Por ejemplo, un motor con un ángulo de paso de 1,8° necesitaría 200 pasos para completar una revolución completa (360° / 1,8° = 200 pasos).
Modos de paso:
Los motores paso a paso se pueden accionar en diferentes modos según cómo se energicen las bobinas:
- Paso completo: el motor se energiza de manera que cada paso mueva el rotor en el ángulo de paso completo.
- Medio paso: el motor se mueve en pasos más pequeños, lo que proporciona un movimiento más suave y una mayor resolución.
- Micropasos: este es el modo más avanzado, en el que las bobinas del motor se activan de tal manera que el rotor se mueve en incrementos muy pequeños. Esto proporciona un control muy preciso y un movimiento suave.
Fase y bobina:
- Un motor paso a paso consta de múltiples fases o bobinas. Al activar estas bobinas en la secuencia correcta, se obliga al rotor a moverse de forma incremental.
- Por ejemplo, en un motor paso a paso de dos fases, el rotor gira en pasos distintos debido al campo magnético creado por las bobinas que se activan en un orden particular.
Métodos para controlar un motor paso a paso
Existen varias formas de controlar un motor paso a paso, cada una con sus propias ventajas y desventajas. El método que elija depende de la aplicación, la precisión requerida y el hardware disponible.
Uso de un microcontrolador (por ejemplo, Arduino)
Los motores paso a paso suelen estar controlados por microcontroladores. Estos producen las señales de pulso necesarias que se transmiten al circuito controlador del motor, que regula la corriente que pasa por las bobinas del motor. Esta técnica se aplica con frecuencia a pequeñas máquinas y proyectos de bricolaje.
Por ejemplo, un Arduino puede controlar un motor paso a paso mediante una biblioteca como AccelStepper. El Arduino envía una serie de pulsos digitales al controlador del motor, y el controlador suministra el voltaje y la corriente adecuados a las bobinas del motor.
Ejemplo de código básico de Arduino:
#include
<Stepper.h>
const int stepsPerRevolution = 200; // Change this to match your motor’s specification
// Initialize the Stepper library with the number of steps per revolution
Stepper stepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// Set the motor speed (in RPM)
stepper.setSpeed(60);
}
void loop() {
// Move the motor 100 steps forward
stepper.step(100);
delay(1000);
// Move the motor 100 steps backward
stepper.step(-100);
delay(1000);
}
Uso de un controlador de motor paso a paso dedicado
Puede controlar la corriente que fluye hacia las bobinas del motor paso a paso mediante un circuito especializado conocido como controlador de motor paso a paso, como el A4988 o el DRV8825. Además de manejar las corrientes más altas que necesitan los motores paso a paso, estos controladores ofrecen capacidades de micropaso para un movimiento más fluido. Por ejemplo, un Arduino u otros microcontroladores se pueden combinar con un controlador como el A4988 para controlar el motor paso a paso a través de señales de pulso. El microcontrolador genera una señal y el controlador controla las bobinas del motor de acuerdo con esa señal.
Cableado básico para un controlador A4988 con un Arduino:
- VDD a Arduino 5V
- GND a Arduino GND
- STEP a un pin digital de Arduino (p. ej., pin 3)
- DIR a un pin digital de Arduino (p. ej., pin 4)
- VMOT a una fuente de alimentación de motor
- Pines M0, M1, M2 para configuraciones de micropasos (opcional)
Uso de una computadora o un PLC (controlador lógico programable)
Para aplicaciones industriales y más complejas, los motores paso a paso se pueden controlar mediante una computadora que ejecute un software de control o mediante un PLC. Esta configuración es común en máquinas CNC y sistemas automatizados, donde se necesita un control de nivel superior para múltiples motores y movimientos de precisión.
Control con una fuente de alimentación
Además de los controladores, la fuente de alimentación es un componente clave en el control del motor paso a paso. Las especificaciones de voltaje y corriente del motor y el controlador deben coincidir, ya que una fuente de alimentación inadecuada puede causar sobrecalentamiento, pérdida de torque y daños al motor.
Señales de control y sincronización
- Frecuencia de pulsos (frecuencia): la frecuencia de la señal de pulso determina la velocidad del motor. Un movimiento más rápido se asocia con una frecuencia mayor, mientras que un movimiento más lento se asocia con una frecuencia menor.
- Control de dirección: para muchos controladores, el pin DIR controla la dirección de rotación. Cambiar el estado de este pin (ALTO o BAJO) revertirá la rotación del motor.
Cuadro resumen del control de motores paso a paso
| Método de Control | Ventajas | Desventajas |
| Microcontrolador | Bajo costo, simple, fácil de programar | Manejo limitado de potencia |
| Controlador de Paso Dedicado | Confiable, maneja mayor potencia, soporte de micro-pasos | Cableado más complejo, costo adicional |
| Control basado en PLC/Computadora | Alta precisión, escalable para sistemas grandes | Costoso, configuración compleja |
| Control de Fuente de Alimentación | Básico, funciona para aplicaciones simples | Funcionalidad limitada, sin control avanzado |
Consideraciones clave al controlar un motor paso a paso
- Requisitos de potencia: los motores paso a paso requieren más potencia que los motores de CC normales, especialmente cuando están bajo carga o funcionan a altas velocidades. Para evitar daños, utilice siempre una fuente de alimentación que sea compatible con los requisitos del motor.
- Disipación de calor: los motores paso a paso tienden a calentarse, especialmente bajo cargas pesadas. Si su motor funciona durante períodos prolongados, asegúrese de que tenga la ventilación adecuada o considere agregar disipadores de calor o ventiladores.
- Micropasos: mientras que el paso a paso completo le da al motor su par máximo, el micropaso ofrece un movimiento más suave y una mejor precisión, aunque con un par reducido. Al elegir su enfoque de control, es esencial comprender las compensaciones.
Conclusión
Comprender el comportamiento de un motor paso a paso y elegir la mejor estrategia de control para su aplicación es esencial para controlarlo. Ya sea que utilice un microcontrolador como Arduino, un controlador dedicado como el A4988 o sistemas industriales más avanzados, los motores paso a paso brindan un excelente control sobre la posición y la velocidad sin la necesidad de sistemas de retroalimentación. Al elegir la combinación correcta de potencia, controladores y señales de control, puede lograr un funcionamiento preciso y confiable para su proyecto.
