Motor corriente continua sin escobillas Outrunner vs. Inrunner: una comparación completa
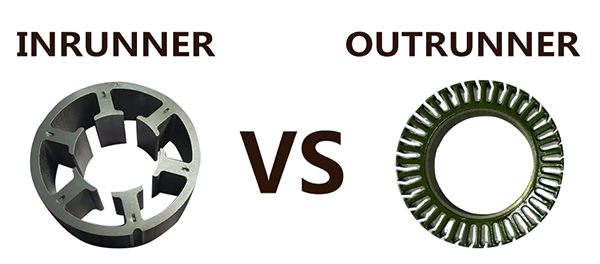
¿Qué es un motor sin escobillas Outrunner? Un motor de corriente continua sin escobillas (BLDC) con el rotor en el exterior y el estator en el interior se denomina motor sin escobillas de rotor externo. Este diseño contrasta con los motores tradicionales, en los que el rotor suele estar dentro del estator. El diseño de rotor externo permite obtener ciertas ventajas de rendimiento, en particular en la generación de un par mayor. Componentes clave Rotor externo: el rotor de un motor de propulsión externa se encuentra en el exterior y, por lo general, tiene imanes permanentes fijados a su superficie interior. Esta ubicación externa del rotor es clave para la capacidad del motor de producir un par elevado. Estator interno: el estator se encuentra dentro del rotor y contiene los devanados. Cuando la corriente eléctrica fluye a través de estos devanados, genera un campo magnético. Devanados: son bobinas de alambre situadas en el estator. Generan movimiento cuando la corriente fluye a través de ellas y se combinan con el campo magnético del rotor para producir un campo electromagnético. Principio de funcionamiento El funcionamiento de un motor sin escobillas con motor fueraborda implica los siguientes pasos: Corriente eléctrica y campo magnético: cuando una corriente eléctrica pasa a través de los devanados del estator, genera un campo magnético giratorio. Interacción con los imanes del rotor: los imanes permanentes de la superficie interior del rotor externo están en contacto con este campo magnético giratorio. Producción de par: el par producido por la interacción de los campos magnéticos de los imanes del rotor y los devanados del estator hace que el rotor gire. Rotación continua: el rotor continúa girando mientras los devanados del estator reciban corriente, lo que mantiene un campo magnético giratorio que mantiene al rotor en movimiento. Ventaja y Desventaja Producto destacado ¿Qué es un motor sin escobillas Inrunner? Un ejemplo de un motor de corriente continua sin escobillas (BLDC) con un rotor alojado dentro del estator es un motor sin escobillas con rotor interno. Este diseño convencional contrasta con el motor con rotor externo, en el que el rotor es externo. Los motores con rotor interno son conocidos por su capacidad de alcanzar altas velocidades de rotación y se utilizan a menudo en aplicaciones donde la compacidad y las altas RPM son esenciales. Principio de funcionamiento El funcionamiento de un motor sin escobillas inrunner implica los siguientes pasos: Corriente eléctrica y campo magnético: un campo magnético giratorio se produce mediante una corriente eléctrica que pasa a través de los devanados del estator. Interacción con los imanes del rotor: este campo magnético giratorio interactúa con los imanes permanentes de la superficie del rotor. Producción de par: la interacción de los campos electromagnéticos del estator y el rotor produce par, que hace que el rotor gire. Rotación continua: mientras los devanados del estator reciban corriente, el campo magnético giratorio se mantendrá y el rotor seguirá girando, lo que producirá un movimiento continuo. Componentes clave Rotor interno: el rotor se encuentra dentro del estator y contiene imanes permanentes en su superficie exterior. La ubicación compacta del rotor permite una rotación a alta velocidad. Estator externo: los devanados se encuentran en el estator, que rodea al rotor. Devanados: cuando se energizan, las bobinas de alambre dentro del estator producen un campo electromagnético. Cuando este campo interactúa con el campo magnético del rotor, se produce movimiento. Ventaja y Desventaja Producto destacado ¿Cómo elegir motores sin escobillas Inrunner y motores sin escobillas Outrunner? Aplicaciones de alta velocidad Elija motores sin escobillas Inrunner: Razones: Los motores Inrunner están diseñados para alcanzar altas velocidades de rotación (RPM). Debido a su diseño liviano y compacto, se pueden utilizar en situaciones donde se requiere alta eficiencia a altas velocidades. Ejemplos: herramientas eléctricas (taladros, amoladoras), automóviles y barcos RC, robótica de alta velocidad, vehículos eléctricos (particularmente en aplicaciones donde el espacio es limitado y se necesitan altas RPM). Aplicaciones de alto par Elija motores sin escobillas Outrunner: Razones: Los motores Outrunner proporcionan un mayor par debido a su mayor diámetro de rotor. Debido a su resistencia y capacidad para manejar grandes cargas, son perfectos para aplicaciones que requieren mucho par. Ejemplos: Drones (para elevación y maniobrabilidad), bicicletas eléctricas, sistemas de cardán, maquinaria industrial que necesita alto torque a velocidades más bajas. Diseños compactos y ligeros Elija motores sin escobillas Inrunner: Razones: Los motores Inrunner son generalmente más compactos y livianos que los motores outrunner, lo que los hace adecuados para aplicaciones donde el espacio y el peso son factores críticos. Ejemplos: robótica (donde la precisión y la compacidad son esenciales), vehículos eléctricos de pequeña escala, herramientas portátiles. Aplicaciones que requieren un funcionamiento fluido Elija motores sin escobillas Outrunner: Razones: Los motores Outrunner tienden a funcionar de manera más suave y con menos ondulación de torque, lo que proporciona un rendimiento estable que es crucial para aplicaciones que requieren un control fino y un movimiento suave. Ejemplos: estabilizadores de cámara, dispositivos médicos, instrumentos de precisión, proyectos de aficionados que necesitan un rendimiento suave y estable. Necesidades de alta eficiencia Elija los motores sin escobillas Inrunner para lograr una eficiencia de alta velocidad: Razones: Los motores Inrunner son altamente eficientes a altas velocidades, lo que los hace ideales para aplicaciones donde mantener la eficiencia a altas RPM es crucial. Ejemplos: vehículos eléctricos de alta velocidad, herramientas eléctricas de alto rendimiento y cualquier aplicación donde se requiera un funcionamiento continuo a alta velocidad. Elija los motores sin escobillas Outrunner para lograr una eficiencia de alto torque: Razones: Los motores Outrunner son eficientes en la conversión de energía eléctrica en torque, lo que los hace adecuados para aplicaciones que requieren una producción de torque eficiente. Ejemplos: bicicletas eléctricas, drones (para elevación y maniobrabilidad eficientes) y aplicaciones que necesitan un torque sostenido. Condiciones ambientales Elija según los requisitos de refrigeración: Motores Inrunner: refrigeración eficaz a través del estator, adecuado para entornos en los que se puede gestionar la refrigeración y se necesitan altas velocidades. Motores Outrunner: mejor refrigeración natural gracias al rotor externo, lo que los