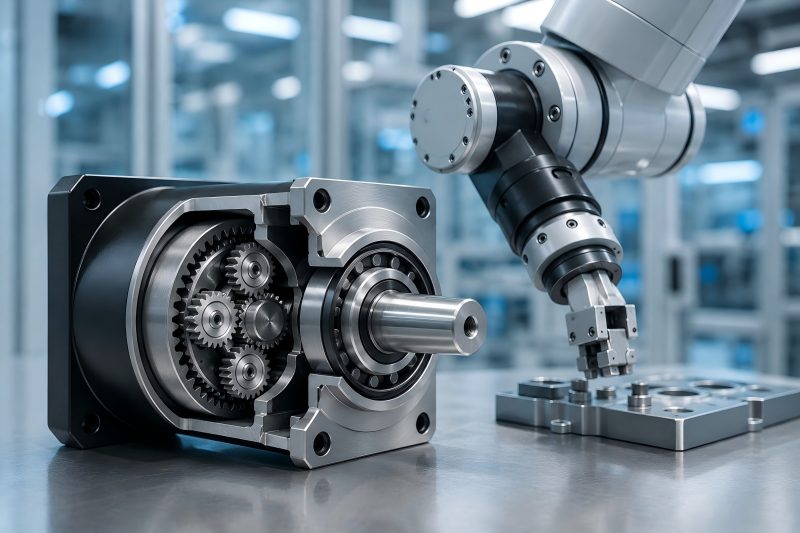
Los motores de engranajes planetarios para robótica ofrecen una alta densidad de par, un tamaño compacto, un funcionamiento suave y un excelente rendimiento de posicionamiento. Se utilizan ampliamente en brazos robóticos, vehículos guiados automáticamente (AGV), robots móviles autónomos (AMR), robots de servicio, robots de inspección y sistemas de automatización industrial.
Por qué se utilizan motores de engranajes planetarios en robótica
Los robots a menudo necesitan realizar movimientos repetitivos con gran precisión. Un motor simple puede girar demasiado rápido y proporcionar un par insuficiente para tareas de carga pesada o de precisión. Una caja de engranajes planetarios resuelve este problema reduciendo la velocidad y aumentando el par.
Por ejemplo, una articulación robótica puede necesitar una rotación lenta y controlada mientras transporta una herramienta, una pinza o una carga útil. Un motor de engranajes planetarios puede proporcionar el par necesario, al tiempo que ayuda al sistema de control a mantener un movimiento suave y preciso.
Aplicaciones comunes en robótica
| Aplicación robótica | Función del motorreductor planetario | Requisitos clave |
| Brazos robóticos | Rotación y posicionamiento de las articulaciones | Alto par, bajo juego, control suave |
| AGV y AMR | Tracción y dirección | Durabilidad, eficiencia, tamaño compacto |
| Robots de servicio | Movimiento de brazo, rueda o elevación | Funcionamiento silencioso, velocidad estable |
| Robots de inspección | Movimiento sobre orugas, ruedas o con cámara | Resistencia a los golpes, control fiable |
| Robots colaborativos | Movimiento articular y accionamiento ligero | Precisión, seguridad, diseño compacto |
| Robots para la automatización de almacenes | Elevación, desplazamiento y posicionamiento | Alto ciclo de trabajo, larga vida útil |
Ventajas clave de los motorreductores planetarios para robótica
Alto par en un tamaño compacto
Una de las mayores ventajas de los motores de engranajes planetarios es su alta densidad de par. Dado que la carga se distribuye entre varios engranajes planetarios, la caja de engranajes puede transmitir más par sin necesidad de una estructura de grandes dimensiones.
Esto es importante en robótica, donde el espacio interno compacto es esencial. Los brazos robóticos, las plataformas móviles y los sistemas de automatización compactos se benefician de una unidad de accionamiento más pequeña con una gran potencia de salida.
Mayor precisión de movimiento
Las aplicaciones robóticas suelen requerir un control preciso de la posición. Los motores de engranajes planetarios pueden permitir un movimiento preciso cuando se combinan con motores, encoders y sistemas de control adecuados.
Las cajas de engranajes planetarios de bajo juego son especialmente útiles para articulaciones robóticas, pinzas y mecanismos de posicionamiento. Un juego menor significa menos error de movimiento cuando el motor cambia de dirección.
Funcionamiento suave a baja velocidad
Muchos movimientos robóticos requieren un funcionamiento controlado a baja velocidad en lugar de una rotación rápida. Un reductor planetario reduce la velocidad del motor al tiempo que aumenta el par de salida.
Esto ayuda a los robots a moverse con mayor suavidad durante las tareas de elevación, giro, sujeción, rotación y posicionamiento.
Fuerte distribución de la carga
Los engranajes planetarios reparten la carga entre varios puntos de contacto, lo que mejora la resistencia y ayuda a que el reductor soporte arranques, paradas y movimientos de marcha atrás frecuentes.
Para los robots industriales y de almacén, esto es importante porque a menudo trabajan de forma continua en condiciones exigentes.
Alta eficiencia
En comparación con algunos sistemas de reducción de engranajes tradicionales, las cajas de engranajes planetarios suelen ofrecer una buena eficiencia de transmisión. Esto mejora la eficiencia y reduce la acumulación de calor.
En el caso de los robots alimentados por batería, como los AGV, los AMR, los robots de reparto y los robots de inspección, una mayor eficiencia puede permitir un tiempo de funcionamiento más prolongado.
Instalación compacta y flexible
Los motores de engranajes planetarios están disponibles en diferentes tamaños, relaciones de transmisión, tipos de eje de salida y opciones de montaje. Esto permite una integración más fácil en diversos diseños de robots.
Se pueden utilizar en módulos de ruedas, articulaciones robóticas, plataformas giratorias, sistemas de elevación y dispositivos de automatización personalizados.
Motor de engranajes planetarios frente a otros tipos de motores de engranajes en robótica
| Tipo de motorreductor | Ventajas | Limitaciones | Uso adecuado en robótica |
| Motor de engranajes planetarios | Alta densidad de par, compacto, eficiente, preciso | Mayor coste que las cajas de engranajes simples | Brazos robóticos, AGV, AMR, articulaciones de precisión |
| Motor de engranaje helicoidal | Alta relación de reducción, opción de autobloqueo | Menor eficiencia, mayor generación de calor | Mecanismos de elevación, sistemas de baja velocidad |
| Motor de engranajes rectos | Estructura sencilla, rentable | Más ruido, menor densidad de par | Robots básicos, movimiento de baja carga |
| Motor de engranajes helicoidales | Funcionamiento suave, mayor capacidad de carga | Tamaño mayor, estructura más compleja | Automatización industrial y robots para trabajos pesados |
| Motor de transmisión armónica | Precisión muy alta, compacto | Mayor coste, menor resistencia a los golpes | Robots colaborativos, articulaciones robóticas de precisión |
Para muchas aplicaciones robóticas, los motores de engranajes planetarios ofrecen un equilibrio práctico entre precisión, par, eficiencia y coste.
Consejos importantes para la selección de motores de engranajes planetarios en robótica
La elección del motor de engranajes planetarios adecuado no se reduce únicamente a la potencia del motor. La selección debe tener en cuenta el par, la velocidad, el juego, el ciclo de trabajo, el método de control, el espacio de instalación y el entorno operativo.
Defina los requisitos de carga
Empiece por calcular la carga que el robot debe mover. Esto incluye el peso de la pieza del robot, la carga útil, las herramientas, las ruedas, los brazos o el mecanismo de elevación.
En el caso de los brazos robóticos, los requisitos de par varían en función de la longitud del brazo y la posición de la carga útil. Para los robots móviles, el motor debe superar la resistencia a la rodadura, la demanda de aceleración, el ángulo de pendiente y el peso de la carga útil.
Los factores clave incluyen:
- Peso de la carga útil
- Longitud del brazo o radio de las ruedas
- Requisitos de aceleración
- Ángulo de funcionamiento
- Fricción y resistencia
- Factor de seguridad
Un motor demasiado pequeño puede sobrecalentarse o fallar prematuramente. Un motor demasiado grande puede aumentar el coste, el peso y el consumo de energía.
Elija la relación de transmisión correcta
| Rango de relaciones de transmisión | Característica de salida | Aplicación robótica típica |
| 3:1–10:1 | Mayor velocidad, par moderado | Movimiento giratorio rápido, ruedas para trabajo ligero |
| 10:1–30:1 | Velocidad y par equilibrados | Articulaciones robóticas, robots de servicio, pequeños AGV |
| 30:1–100:1 | Par elevado, velocidad reducida | Elevación, articulaciones para cargas pesadas, módulos de dirección |
| 100:1+ | Par muy alto, velocidad muy baja | Posicionamiento especial o automatización de alta resistencia |
La mejor relación de transmisión debe ajustarse a la velocidad y el par requeridos por el robot, no solo a la capacidad máxima del motor.
Presta atención al juego
El juego es el pequeño espacio de movimiento entre los engranajes. En robótica, el juego puede afectar a la precisión de posicionamiento, la repetibilidad y la respuesta de control.
En sistemas sencillos de tracción por ruedas, un juego moderado puede ser aceptable. Para brazos robóticos, sistemas de posicionamiento de cámaras o pinzas de precisión, suele requerirse un juego reducido.
Orientación general:
- Articulaciones robóticas de alta precisión: elija reductores planetarios de bajo juego
- Ruedas de robots móviles: un juego estándar puede ser aceptable
- Robots de inspección o con cámara: un juego menor mejora la precisión de apuntado
- Robots colaborativos: un juego reducido favorece un movimiento más suave y seguro
Seleccione el tipo de motor
Los reductores planetarios se pueden combinar con diferentes motores, incluidos motores de CC, motores de CC sin escobillas, motores paso a paso y servomotores.
Cada tipo de motor tiene diferentes ventajas.
| Tipo de motor | Ventajas | Ideal para |
| Motor de CC con reductor planetario | Control sencillo, rentable | Robots pequeños, movimientos de baja intensidad |
| Motor BLDC con reductor planetario | Alta eficiencia, larga vida útil, bajo mantenimiento | AGV, AMR, robots de servicio |
| Motor paso a paso con engranaje planetario | Buen posicionamiento, posibilidad de control en bucle abierto | Posicionamiento a baja velocidad, automatización de pequeño tamaño |
| Servomotor con engranaje planetario | Alta precisión, respuesta rápida, control en bucle cerrado | Brazos robóticos, articulaciones de precisión, robots industriales |
Para la robótica de alto rendimiento, a menudo se prefieren los servomotores o los motores planetarios BLDC, ya que ofrecen un mejor control, eficiencia y fiabilidad.
Tenga en cuenta la eficiencia y el calor
Los robots suelen funcionar durante largos periodos de tiempo. Si el motor de engranajes tiene una baja eficiencia, puede generar más calor y consumir más energía.
Esto es especialmente importante para:
- Robots móviles alimentados por batería
- Articulaciones robóticas encapsuladas
- Sistemas de automatización de ciclo de trabajo intensivo
- Robots que trabajan en entornos cálidos
Un motorreductor planetario de alta eficiencia ayuda a mejorar el tiempo de funcionamiento, reducir el estrés térmico y proteger los componentes internos.
Compruebe el tamaño y el espacio de montaje
Los sistemas robóticos suelen tener límites de espacio estrictos. Antes de seleccionar un motorreductor planetario, compruebe el espacio de instalación disponible, la disposición de los orificios de montaje, el tipo de eje, la dirección del cable y la longitud de la caja de engranajes.
Las dimensiones importantes incluyen:
- Diámetro de la caja de engranajes
- Longitud total del motor
- Diámetro del eje de salida
- Tamaño de la brida de montaje
- Posición del cable o conector
- Espacio necesario para el encoder
En el caso de los robots compactos, un motor de engranajes planetarios más corto y ligero puede mejorar la disposición mecánica y reducir el peso total del sistema.
Evalúe el ciclo de trabajo y la vida útil
Las aplicaciones robóticas pueden implicar movimientos frecuentes de arranque y parada, inversiones repetidas, cargas de choque o funcionamiento continuo. El motorreductor seleccionado debe ser capaz de soportar el ciclo de trabajo real.
En el caso de los robots industriales o los vehículos guiados automáticos (AGV), la durabilidad es fundamental. La caja de engranajes debe contar con rodamientos resistentes, una lubricación estable, engranajes endurecidos y un sellado adecuado.
Debe tener en cuenta:
- Funcionamiento continuo o intermitente
- Número de arranques y paradas por hora
- Cambios de dirección
- Fluctuación de la carga
- Horas de funcionamiento previstas
- Requisitos de mantenimiento
Seleccione el encoder y la retroalimentación de control adecuados
En la robótica de precisión, es posible que el motor necesite un encoder para obtener información sobre la posición, la velocidad y la dirección. Esto permite al sistema de control supervisar el movimiento y corregir errores.
La selección del encoder depende de la precisión requerida. Los encoders de mayor resolución proporcionan una mejor retroalimentación, pero pueden aumentar el coste y la complejidad del control.
Los brazos robóticos, los robots colaborativos y los sistemas de posicionamiento de cámaras suelen necesitar un control de retroalimentación mejor que los robots simples con tracción por ruedas.
Errores comunes al seleccionar motores de engranajes planetarios para robótica
Muchos problemas de selección se deben a centrarse únicamente en el par nominal o la potencia del motor. En los sistemas robóticos reales, el rendimiento depende de las condiciones operativas completas.
Entre los errores comunes se incluyen:
- Elegir una relación de transmisión sin comprobar la velocidad de salida final
- Ignorar el par máximo durante la aceleración
- Utilizar cajas de engranajes con holgura estándar para articulaciones de precisión
- Seleccionar un motor demasiado grande para la estructura del robot
- Ignorar la acumulación de calor en espacios cerrados
- Olvidarse de la compatibilidad entre el encoder y el controlador
- No tener en cuenta las cargas de choque y las inversiones repetidas
- Elegir en función del precio en lugar del rendimiento durante el ciclo de vida
Un proceso de selección correcto debe equilibrar el rendimiento, el tamaño, el control, la durabilidad y el coste.
Cómo elegir un motor de engranajes planetarios para un proyecto de robótica
Un proceso de selección práctico puede seguir estos pasos:
- Definir el tipo de movimiento del robot: tracción con ruedas, rotación de articulaciones, elevación, sujeción o dirección.
- Calcular el par y la velocidad necesarios en el eje de salida.
- Seleccionar una relación de transmisión adecuada en función de las necesidades de velocidad y par.
- Elegir el tipo de motor según los requisitos de control.
- Confirmar el nivel de holgura para garantizar la precisión de posicionamiento.
- Compruebe la compatibilidad de tensión, corriente, controlador y encoder.
- Revise el tamaño, el peso, la estructura de montaje y el diseño del eje.
- Tenga en cuenta el entorno de funcionamiento, el ciclo de trabajo y la vida útil.
- Pruebe el motor en condiciones de carga real antes de la producción en serie.
