Selecting the appropriate stepper motor for an application involves several key factors, with one of the most important being the inertia of the motor and its load. Properly matching the motor’s inertia with the load’s inertia can significantly impact the performance and efficiency of a system. This article will explore the concepts of motor inertia and load inertia, how to choose the right stepper motor based on these factors, and how to address challenges related to high inertia in stepper motors.
Understanding Inertia in Stepper Motors
In the context of stepper motors, inertia refers to the resistance of the motor’s rotor and the attached load to changes in rotational speed. This property plays a crucial role in the motor’s performance, influencing aspects such as acceleration, deceleration, and overall responsiveness.
Inertia of the Stepper Motor Itself
The inertia of a stepper motor refers to the inertia of its rotor. This is a fixed value determined by the motor’s construction, including the size and mass distribution of the rotor. The rotor inertia impacts the motor’s ability to accelerate and decelerate. A motor with higher rotor inertia takes longer to start and stop but can provide smoother operation under steady conditions.
Key Considerations:
- Small Rotor Inertia: Allows for quick response and rapid acceleration, making it suitable for applications requiring fast, precise movements.
- Large Rotor Inertia: Provides stability and smoother operation but is slower to accelerate and decelerate, which can be beneficial in applications that require less frequent motion.
Inertia of the Load
The load inertia refers to the inertia of the object or mechanism that the motor is driving. This can include components such as gears, belts, pulleys, or any machinery attached to the motor shaft. The load’s inertia is often measured in terms of its effect on the motor, expressed as a moment of inertia.
Key Considerations:
- High Load Inertia: Puts more demand on the motor to accelerate and decelerate the load, which can lead to performance issues if not properly matched with the motor’s capabilities.
- Low Load Inertia: Easier for the motor to handle, allowing for quicker and more precise movements.
Matching Motor Inertia with Load Inertia
To ensure optimal performance, the motor’s rotor inertia and the load inertia must be balanced. A well-matched system can achieve higher acceleration, better precision, and more efficient operation. Here’s how to determine the appropriate inertia match:
Ideal Inertia Ratio
A commonly accepted guideline for choosing the inertia of a stepper motor relative to its load is maintaining an inertia ratio between 1:1 and 1:10. This means the load inertia should be between 1 and 10 times the motor’s rotor inertia. An ideal ratio ensures that the motor can accelerate and decelerate the load effectively without excessive strain.
Calculating the Inertia Ratio:
- Determine Motor Rotor Inertia: This value is provided in the motor’s technical specifications.
- Calculate Load Inertia: Use the following formula to calculate the inertia of the load:
Jload=mass×(radius/2)²
where Jload is the load inertia, mass is the mass of the load, and radius is the distance from the axis of rotation.
- Compute the Inertia Ratio:
Inertia Ratio=Jload/Jmotor
If the ratio is within the acceptable range (1:1 to 1:10), the motor and load are considered well-matched.
Effects of Improper Inertia Matching
- High Inertia Ratio (> 1:10): The motor may find it difficult to efficiently accelerate and decelerate the load if the load’s inertia is much greater than its own.
- This can result in poor performance, reduced precision, and potential motor stalling.
- Low Inertia Ratio (< 1:1): If the motor inertia is too high compared to the load inertia, the system may become sluggish and unresponsive, leading to inefficient performance.
Solving the Problem of Large Inertia in Stepper Motors
Large inertia can pose challenges in stepper motor applications, especially when the load inertia is significantly higher than the motor’s rotor inertia. Here are strategies to address this issue:
Use Gear Reduction
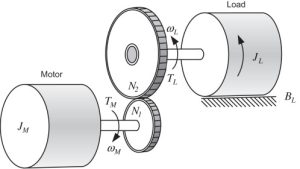
Adding a gear reduction system between the motor and the load can help balance the inertia ratio. In addition to increasing torque, gear reduction lowers the load inertia that is reflected in the motor. This enables the motor to handle higher load inertia while maintaining optimal performance.
Prons:
- Improves torque output.
- Reduces the load inertia seen by the motor.
- Enhances acceleration and deceleration capabilities.
Consideration: The use of gears adds complexity, cost, and potential wear over time, so it is important to choose a gear system that meets the specific requirements of the application.
Select a Stepper Motor with Higher Torque
If the application involves high load inertia, choosing a stepper motor with higher torque can help overcome the increased load resistance. Motors with larger frames or specialized windings can provide the necessary torque to accelerate and decelerate heavy loads.
Tip: Consult with stepper motor manufacturers to find models that offer higher torque ratings and are designed for high-inertia applications.
Optimize Acceleration and Deceleration Profiles
Adjusting the acceleration and deceleration profiles of the motor through its driver or controller can help manage large inertia. By gradually ramping up the speed and slowing down the motor, the strain on the motor can be reduced, preventing missed steps or stalling.
Implementation:
- Use Stepper Motor Drivers: Advanced stepper motor drivers often include configurable settings for acceleration and deceleration. Adjusting these settings can optimize the motor’s performance under high-inertia conditions.
- Custom Control Algorithms: Custom programming within microcontrollers or PLCs can further fine-tune the motion profiles for specific applications.
Reduce the Load Inertia
If possible, redesign or modify the load to reduce its inertia. This could involve using lighter materials, altering the shape or size of components, or reducing the distance between the load and the axis of rotation.
Practical Example:
- Switching from a heavy metal pulley to a lightweight composite pulley can significantly reduce load inertia, improving the motor’s ability to accelerate and decelerate effectively.
How to Choose the Correct Motor Inertia in Practice?
Step 1: Determine the requirements for the application.
Find out the precise specifications for your application, such as torque, speed, acceleration, and accuracy. Understanding these parameters helps in defining the acceptable inertia range.
Step 2: Calculate the Load Inertia
Measure or estimate the mass and radius of all components connected to the motor and calculate the load inertia using the appropriate formulas.
Step 3: Compare and Choose the Motor
Compare the calculated load inertia with the motor’s rotor inertia. Choose a stepper motor where the ratio between load inertia and motor inertia falls within the recommended range to ensure optimal performance.
Step 4: Optimize the System
If the load inertia is higher than ideal, implement solutions such as gear reduction, choosing a higher-torque motor, or adjusting the acceleration profile. Ensure that the mechanical structure is rigid, and fine-tune the motor driver settings as needed.
Conclusion
For a stepper motor to operate at its best, selecting the right inertia is essential. Stepper motor manufacturers emphasize that the motor’s rotor inertia and the load inertia must be matched within an acceptable range to ensure efficient acceleration and deceleration. When faced with high load inertia, strategies such as using gear reduction, selecting a higher torque motor, optimizing motion profiles, or reducing load inertia can help address the challenges.
