Os motores de passo são conhecidos pela sua precisão e repetibilidade, o que os torna a escolha ideal na automação, na impressão 3D, nas máquinas CNC e na robótica. No entanto, sem o controlador adequado, mesmo o melhor motor de passo pode apresentar um desempenho abaixo do esperado. Como fornecedores de motores de passo, já nos deparámos com inúmeros casos em que as falhas do sistema se devem a controladores incompatíveis ou com potência insuficiente.
O que é um controlador de motor de passo?
O controlador de motor de passo fornece corrente aos enrolamentos de acordo com os sinais de controlo. Interpreta os impulsos de passo e de direção provenientes de um controlador ou microcontrolador (como o Arduino, o STM32 ou um PLC) e energiza as bobinas na sequência correta para obter a rotação.
Funções principais de um controlador de motor de passo:
- Interpretar sinais de controlo (passo e direção)
- Controlar a corrente fornecida às bobinas
- Permitir o micropasso para um movimento mais suave
- Gerir a aceleração e a desaceleração do motor
- Proteger contra sobrecorrente, sobreaquecimento e subtensão
Parâmetros-chave a considerar na escolha de um controlador
Ao selecionar um controlador para um motor de passo, deve, em primeiro lugar, adequá-lo às características elétricas e mecânicas do seu motor. Aqui estão os fatores essenciais:
Tipo de motor (unipolar vs. bipolar)
| Tipo de motor | Descrição | Requisitos do controlador |
| Unipolar | Possui bobinas com derivação central. Mais fácil de controlar, mas com menor binário. | Compatível com controlador unipolar (5 ou 6 fios) |
| Bipolar | Sem derivação central, requer ponte em H. Oferece maior binário. | Requer um controlador bipolar (4 fios) |
Os motores bipolares são mais comuns devido à sua melhor relação torque/tamanho.
Valores nominais de tensão e corrente
Corresponda as tensões e correntes nominais do motor e do controlador:
- Corrente (A/fase): O controlador deve suportar a corrente nominal do motor por fase. Escolha sempre um controlador com uma capacidade de corrente 10–20% superior para garantir margem de segurança.
- Tensão (V): Uma tensão mais elevada proporciona um melhor desempenho a alta velocidade, mas deve permanecer dentro dos limites do controlador.
| Exemplo de motor de passo | Corrente nominal | Corrente recomendada do controlador |
| NEMA 17 (42HS40) | 1,5 A | 1,7 – 2,0 A |
| NEMA 23 (57BYGH76) | 2,8 A | 3,0 – 3,5 A |
Suporte a micropassos
O micropasso melhora a suavidade do movimento e a resolução. Níveis comuns de micropasso:
| Modo de micropas | Passos por revolução (motor de 1,8°) |
| Passo completo | 200 passos |
| Meio passo | 400 passos |
| 1/4 de passo | 800 passos |
| 1/16 de passo | 3200 passos |
| 1/32 de passo | 6400 passos |
Mais micropassos = movimento mais suave, mas requer sinais mais precisos e pode reduzir ligeiramente o binário.
Interface de controlo
Escolha um controlador compatível com o seu sistema de controlo:
| Tipo de controlo | Interface | Utilização típica |
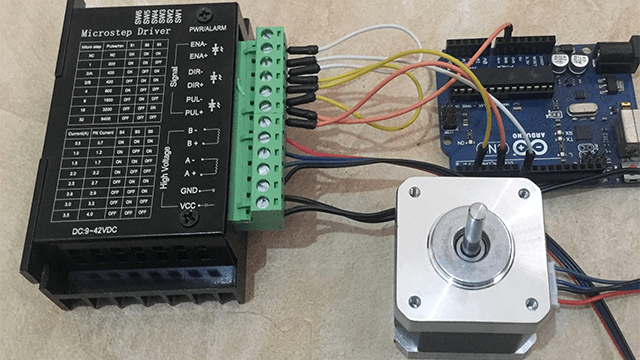
| Passo/Direção | Entrada TTL | Arduino, PLCs, CNC |
| UART/I2C | Barramento série | Controlo avançado por microcontrolador |
| USB/CAN | Controlo do anfitrião | Robótica, controlo industrial |
Para a maioria das aplicações, o controlo Step/Dir é o mais simples e amplamente suportado.
Principais critérios de seleção do controlador
Compatibilidade da corrente nominal
A corrente nominal do controlador deve corresponder o mais possível à corrente nominal de fase do motor. Muitos controladores modernos permitem o ajuste da corrente através de interruptores DIP ou de software. Uma corrente insuficiente resulta num binário baixo, enquanto uma corrente excessiva pode sobreaquecer o motor.
- Melhor prática: Escolha um controlador que suporte pelo menos mais 10% de corrente do que a corrente nominal do motor, mas nunca exceda a corrente nominal máxima do motor.
Tensão nominal
Uma tensão mais elevada aumenta a velocidade do motor e o binário dinâmico, mas também aumenta a dissipação de potência. Certifique-se sempre de que o controlador suporta a gama de tensão necessária do motor.
- Dica: Se o seu motor de passo tiver uma classificação de 3 V e 2 A, um controlador a funcionar a 24 V pode melhorar significativamente o desempenho através de uma energização mais rápida da bobina.
Capacidade de micropas
O micropasso divide os passos para um movimento mais suave e uma resolução de posição mais precisa. Selecione um controlador com base na resolução exigida pela sua aplicação.
| Modo de micropasso | Passos por revolução (para motor de 1,8°) |
| Passo completo | 200 |
| Meio passo | 400 |
| 1/4 de passo | 800 |
| 1/8 de passo | 1600 |
| 1/16 de passo | 3200 |
- Dica de aplicação: Utilize um microstepping mais elevado para aplicações de precisão, como impressoras 3D ou posicionamento de câmaras.
Compatibilidade da interface de controlo
Certifique-se de que o controlador aceita o formato do sinal de controlo fornecido pelo seu controlador de movimento:
- Passo/Direção (o mais comum para CNC e impressão 3D)
- Modulação por Largura de Impulso (PWM)
- Serial (UART/I²C/SPI)
- Controlo analógico
- CANopen ou EtherCAT para aplicações industriais
Tipo de controlador (Chopper vs. L/R Drive)
| Tipo | Descrição |
| Controladores L/R | Simples, utilizam resistências para limitar a corrente, menos eficientes |
| Controladores do tipo chopper | Utilizam comutação de alta frequência para regular a corrente dinamicamente, mais eficientes |
Os controladores chopper são atualmente o padrão da indústria devido ao seu desempenho e eficiência.
Escolher o tipo de controlador
Eis as tecnologias de controladores mais comuns:
Controladores L/R (Resistência Linear)
- Simples, de baixo custo
- Ideais para aplicações de baixa velocidade e baixo desempenho
- Eficiência limitada
Controladores do tipo «chopper» (controlo de corrente por PWM)
- Utilizam modulação por largura de pulso para controlar a corrente da bobina
- Mais eficiente
- Permitem o micropasso e o controlo dinâmico da corrente
- Exemplos: A4988, DRV8825, TB6600
Controladores de motor de passo de circuito fechado
- Incluem um codificador para feedback
- Evitam a perda de passos
- Oferecem um desempenho semelhante ao de servomotores
- Custo mais elevado, utilizados em aplicações exigentes
| Tipo de controlador | Custo | Feedback | Adequado para |
| Driver L/R | Baixo | Não | Básico DIY ou educativo |
| Driver PWM | Médio | Não | Impressoras 3D, CNC, automação geral |
| Circuito fechado | Elevado | Sim | Robótica, movimento de precisão, cargas pesadas |
Tabela de seleção de controladores de motores de passo
Eis um quadro de referência rápida dos motores de passo mais comuns e dos controladores adequados:
| Modelo do motor | Tamanho | Tensão | Corrente | Modelo de controlador adequado | Micropas | Notas |
| 42HS40 NEMA 17 | 17 | 12 V | 1,5 A | A4988, DRV8825 | 1/16 | Ideal para impressoras 3D |
| 57BYGH76 NEMA 23 | 23 | 24–48 V | 2,8 A | TB6600, DM542 | 1/32 | Router CNC, gravador a laser |
| 86BYG250 NEMA 34 | 34 | 48 V | 6,0 A | DM860, Leadshine CL86T | Circuito fechado | Aplicações de serviço pesado |
Características adicionais a ter em conta
Ao escolher um controlador, estas características podem melhorar o desempenho e a fiabilidade:
Proteção contra sobrecorrente e sobretemperatura
Protege o motor e o controlador contra danos causados por sobrecarga ou sobreaquecimento.
Limitação de corrente ajustável
Permite um ajuste preciso para corresponder às especificações do motor e evitar o aquecimento excessivo.
Redução da corrente em vazio
Reduz a corrente quando o motor está em inatividade, diminuindo o aquecimento e o consumo de energia.
Dissipador de calor ou ventoinha integrados
Essencial para controladores de corrente mais elevada, a fim de manter a estabilidade da temperatura.
Adaptação do controlador à fonte de alimentação
Certifique-se de que a fonte de alimentação satisfaz as necessidades de tensão e corrente de ambos.
| Controlador do motor | Tensão de alimentação recomendada | Notas |
| A4988 | 8–35 V | Utilize 12 V ou 24 V para um melhor desempenho |
| DRV8825 | 8,2–45 V | Adequado para motores de gama média |
| TB6600 | 9–42 V | Utilize 24 V ou mais para obter binário a alta velocidade |
| DM542 | 18–50 V | De nível industrial, excelente para NEMA 23 |
- Regra geral: Corrente total = 1,5x a corrente nominal do motor (para margem de segurança)
Exemplos de aplicação
Exemplo 1: Impressora 3D (NEMA 17 + A4988)
- Baixo binário, alta precisão
- Baixo custo, espaço limitado
- Controlador: A4988 ou DRV8825
- Alimentação: 12–24 V a 2 A
Exemplo 2: Fresadora CNC (NEMA 23 + TB6600)
- Binário médio, movimento rápido
- Controlador: TB6600 ou DM542
- Alimentação: 24–48 V a 4 A
Exemplo 3: Sistema de correia transportadora (NEMA 34 + controlador de circuito fechado)
- É necessário um binário elevado e feedback
- Controlador: Leadshine CL86T
- Potência: 48 V a 6–8 A
Erros comuns a evitar
- Corrente do controlador subdimensionada: pode levar a saltos de passos ou ao bloqueio do movimento.
- Interface de controlo incorreta: Provoca falhas de comunicação com o microcontrolador ou o PLC.
- Arrefecimento insuficiente: leva ao sobreaquecimento e ao desligamento do controlador.
- Movimento ruidoso: causado pela ausência de micropassos ou por uma frequência de PWM inadequada.
- Tensão de sobrecarregamento: danifica o isolamento do controlador ou do motor.
Escolher o controlador certo não se resume apenas a comparar especificações. É necessário compreender as exigências da sua aplicação, as características do motor e os objetivos de desempenho. O controlador certo garante um funcionamento suave, eficiente e duradouro do motor de passos.
Quer esteja a construir uma impressora 3D amadora ou um sistema CNC industrial, utilize este guia para comparar as opções de controladores com base na corrente, tensão, método de controlo, micropas e funcionalidades de proteção.
Ainda tem dúvidas? Como fornecedor profissional de motores de passo e controladores, oferecemos apoio técnico e ajudamos a escolher o controlador certo para as necessidades da sua aplicação. Contacte-nos a qualquer momento!
