Servomotoren eignen sich perfekt für Systeme, die eine hohe Leistung erfordern, da sie Position, Geschwindigkeit und Drehmoment präzise steuern können. Die Steuerung von Servomotoren ist jedoch ein komplexer Prozess, und es werden verschiedene Steuerungsmethoden eingesetzt, um basierend auf spezifischen Anforderungen eine optimale Leistung zu erzielen. In diesem Artikel werden wir fünf gängige Steuerungsmethoden für Servomotoren untersuchen und ihre Funktionen, Vorteile und besten Einsatzszenarien besprechen. Wir werden auch einige Diagramme einfügen, um Ihnen zu helfen, die Unterschiede zwischen diesen Steuerungsmethoden besser zu verstehen.
Offene Regelung
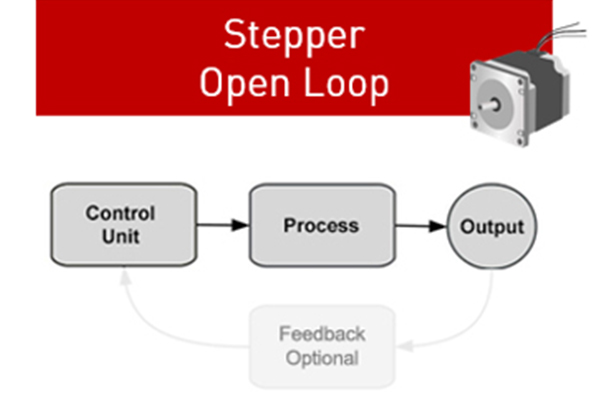
Die offene Regelung ist die einfachste Form der Servomotorsteuerung. In diesem System erhält der Motor Befehle basierend auf voreingestellten Werten wie Geschwindigkeit, Position oder Drehmoment ohne Rückkopplungsmechanismus. Um eine Aufgabe auszuführen, signalisiert der Controller dem Servomotor, der entsprechend dieser Eingabe reagiert. Bei der offenen Regelung gibt es keine kontinuierliche Überwachung der Motorleistung. Wenn es daher Änderungen im System oder Störungen (wie Lastschwankungen oder Reibungsschwankungen) gibt, kann sich der Motor möglicherweise nicht entsprechend anpassen.
Funktionen und Vorteile
- Einfachheit: Offene Regelsysteme sind unkompliziert und leicht zu implementieren, da sie keine Rückkopplungssensoren oder komplexen Algorithmen erfordern.
- Kostengünstig: Da keine zusätzlichen Sensoren erforderlich sind, sind die Kosten des Systems im Vergleich zu geschlossenen Regelsystemen geringer.
- Geeignet für Anwendungen mit geringen Anforderungen: Offene Regelsysteme funktionieren gut in Anwendungen, bei denen Präzision nicht entscheidend ist und externe Störungen minimal sind.
Einschränkungen
- Keine Rückkopplung: Der größte Nachteil offener Regelsysteme besteht darin, dass sie Fehler bei Position, Geschwindigkeit oder Drehmoment nicht kompensieren.
- Inkonsistente Leistung: Bei Änderungen der Last oder externen Kräfte kann es vorkommen, dass der Motor nicht die erwartete Leistung erbringt.
Anwendungsfälle
- Kleine Roboter- oder Automatisierungssysteme.
- Anwendungen mit geringen Präzisionsanforderungen.
- Hobbyprojekte oder Bildungseinrichtungen.
| Steuerungstyp | Systemkomplexität | Kosten | Positionsgenauigkeit | Feedback Verwendet |
| Offene Schleifensteuerung | Niedrig | Niedrig | Niedrig | Nein |
| Geschlossene Schleifensteuerung | Hoch | Hoch | Hoch | Ja |
Geschlossene Regelsysteme (Rückkopplungssteuerung)
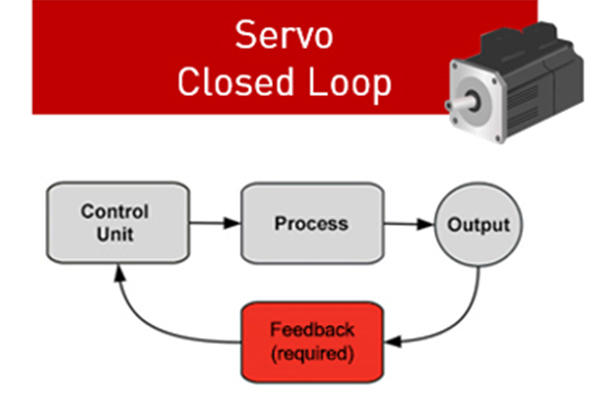
Eine anspruchsvollere Technik zur Steuerung von Servomotoren ist die geschlossene Regelschleife, die manchmal auch als Rückkopplungssteuerung bezeichnet wird. In einem geschlossenen System werden Rückkopplungsgeräte wie Encoder, Resolver oder Tachometer verwendet, um die Position, Geschwindigkeit oder das Drehmoment des Motors zu überwachen. Basierend auf der Differenz, dem sogenannten Fehlersignal, passt der Controller die Leistung des Motors in Echtzeit an, um die gewünschte Leistung zu erzielen. Dieser kontinuierliche Rückkopplungsmechanismus stellt sicher, dass sich der Motor selbst anpasst, um Position, Geschwindigkeit und Drehmoment genau beizubehalten.
Funktionen und Vorteile
- Präzision: Geschlossene Systeme bieten eine hohe Genauigkeit und können Schwankungen bei Last, Reibung und Umgebungsbedingungen ausgleichen.
- Anpassbarkeit: Durch Rückkopplung kann sich das System an Laständerungen oder unerwartete Störungen anpassen, was das System robuster macht.
- Hohe Effizienz: Geschlossene Regelkreise minimieren Energieverschwendung, da der Motor sein Verhalten an die Anforderungen des Systems anpassen kann.
Einschränkungen
- Komplexität: Geschlossene Regelkreise erfordern zusätzliche Komponenten wie Encoder und Controller, was sie komplexer und teurer macht als offene Regelkreise.
- Höhere Kosten: Aufgrund der Notwendigkeit von Rückkopplungsmechanismen und ausgefeilteren Steuerungen sind geschlossene Regelsysteme teurer.
Anwendungsfälle
- Industrielle Automatisierungssysteme.
- CNC-Maschinen und Robotik.
- Anwendungen wie medizinische Geräte erfordern ein hohes Maß an Präzision.
| Parameter | Offene Schleifensteuerung | Geschlossene Schleifensteuerung |
| Feedback-Mechanismus | Keiner | Kontinuierliches Feedback |
| Präzision | Niedrig | Hoch |
| Systemkomplexität | Einfach | Komplex |
| Kosten | Niedrig | Hoch |
| Geeignet für | Aufgaben mit geringer Anforderung | Aufgaben mit hoher Präzision |
Positionsregelung
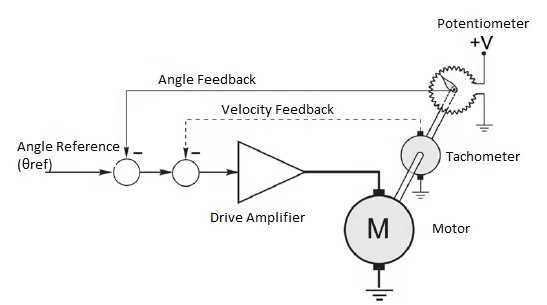
Bei der Positionssteuerung geht es darum, die Position eines Servomotors genau zu steuern. Bei dieser Methode sendet die Steuerung ein Signal an den Motor, um ihn in eine bestimmte Position zu bewegen, und der Rückkopplungsmechanismus stellt sicher, dass der Motor diese Position erreicht und hält. Anwendungen wie Roboter und CNC-Maschinen, die eine genaue Platzierung erfordern, sind stark von diesem System abhängig.
Bei der Positionssteuerung überwacht die Steuerung kontinuierlich die Position des Motors und passt das Eingangssignal an, um Abweichungen von der Zielposition zu korrigieren. Diese Methode wird oft in Kombination mit einer geschlossenen Regelschleife implementiert, um die Genauigkeit zu verbessern.
Funktionen und Vorteile
- Hohe Präzision: Bietet hochpräzise Positionierung und ist daher ideal für Roboter, automatisierte Fertigung und medizinische Anwendungen.
- Echtzeitanpassung: Der Motor kann sich kontinuierlich anpassen, um die genaue Position auch bei Laständerungen oder Störungen zu erreichen.
- Vielseitigkeit: Funktioniert gut in Anwendungen, die eine bestimmte Winkel- oder Linearpositionierung erfordern.
Einschränkungen
- Komplexe Einrichtung: Erfordert präzise Rückmeldegeräte (wie Encoder) und Algorithmen zur genauen Steuerung der Motorbewegung.
- Höhere Kosten: Das System ist teurer, da es mehr Sensoren und Steuerungen erfordert.
Anwendungsfälle
- CNC-Maschinen und 3D-Drucker.
- Roboterarme und automatisierte Pick-and-Place-Systeme.
- Präzise Fertigungsprozesse.
| Steuerungsmethode | Hauptfokus | Präzision | Geschwindigkeitsregelung | Lastkompensation |
| Positionssteuerung | Positionsgenauigkeit | Hoch | Begrenzt | Hoch |
| Geschwindigkeitsregelung | Geschwindigkeitsregelung | Mäßig | Hoch | Mäßig |
Geschwindigkeitsregelung
Bei der Drehzahlregelung wird die Motordrehzahl durch Änderung des Eingangssignals angepasst, um trotz Lastschwankungen oder anderer Störungen eine konstante Drehzahl aufrechtzuerhalten. Die Drehzahlregelung ist entscheidend für Anwendungen, bei denen die Beibehaltung einer konstanten Drehzahl wichtiger ist als die Positionsgenauigkeit.
In vielen Fällen wird die Drehzahlregelung mit anderen Steuerungsmethoden wie der Regelung kombiniert, um sicherzustellen, dass der Motor die gewünschte Drehzahl beibehält und sich an Lastschwankungen anpasst.
Funktionen und Vorteile
- Konsistenz: Die Drehzahlregelung sorgt dafür, dass der Motor mit konstanter Drehzahl läuft, auch wenn die Last schwankt.
- Effizienz: Reduziert den Stromverbrauch in Anwendungen, bei denen die Aufrechterhaltung der Drehzahl wichtiger ist als die Positionsgenauigkeit.
- Einfachheit: Sie ist einfacher zu implementieren als die Positionsregelung, was sie in bestimmten Anwendungen kostengünstiger macht.
Einschränkungen
- Mangelnde Positionsgenauigkeit: Die Drehzahlregelung konzentriert sich auf die Aufrechterhaltung der Drehzahl, nicht auf die Position des Motors, was sie für
- Präzisionsanwendungen weniger geeignet macht.
- Weniger robust: Kann bei erheblichen externen Störungen, wie z. B. starken Laständerungen, Schwierigkeiten haben, die Leistung aufrechtzuerhalten.
Anwendungsfälle
- Förderbänder, Lüfter und Pumpen.
- Anwendungen, bei denen kontinuierliche Bewegung ohne Positionsgenauigkeit erforderlich ist.
- HVAC-Systeme und Industrieanwendungen mit geringer Last.
| Steuerungsmethode | Hauptfokus | Präzision | Effizienz | Anwendungsbereich |
| Geschwindigkeitsregelung | Geschwindigkeitsregelung | Mäßig | Hoch | Förderbänder, Lüfter |
| Drehmomentregelung | Drehmomentregelung | Hoch | Mäßig | Lastempfindliche Aufgaben |
Drehmomentregelung
Die Drehmomentregelung konzentriert sich auf die Regulierung der Drehmomentabgabe eines Servomotors. Bei dieser Methode passt der Motor seinen Strom an, um ein bestimmtes Drehmoment aufrechtzuerhalten, unabhängig von Drehzahl oder Position. Die Drehmomentregelung ist für Anwendungen unerlässlich, bei denen eine konstante Kraft oder ein konstantes Drehmoment wichtiger ist als die Aufrechterhaltung einer bestimmten Drehzahl oder Position. Die Drehmomentregelung wird häufig in Prüfmaschinen, Pressen und Systemen verwendet, die eine präzise Kraftregelung erfordern.
Funktionen und Vorteile
- Kraftregelung: Ideal für Anwendungen, die eine präzise Kraftregelung erfordern, wie z. B. bei Materialprüfungen oder Herstellungsprozessen.
- Lastempfindlichkeit: Der Motor kann sich durch Anpassen des Drehmomentausgangs an unterschiedliche Lasten anpassen und so eine gleichbleibende Leistung gewährleisten.
- Flexibilität: Geeignet für Anwendungen, bei denen die Geschwindigkeits- oder Positionsregelung nicht so wichtig ist wie die ausgeübte Kraft.
Einschränkungen
- Komplexer Aufbau: Erfordert eine genaue Drehmomentmessung und hochentwickelte Steuerungen, um das Drehmoment effektiv zu regulieren.
- Geringere Präzision: Obwohl sie bei der Drehmomentregelung hervorragend ist, ist sie weniger effektiv für Anwendungen, die eine hohe Präzision bei Position oder Geschwindigkeit erfordern.
Anwendungsfälle
- Prüfstände, Materialprüfmaschinen und Pressen.
- Roboterarme erfordern Kraftrückmeldung.
- Automatisierte Montagelinien, die eine präzise Kraftanwendung erfordern.
| Steuerungsmethode | Hauptfokus | Präzision | Kraftregelung | Geeignet für |
| Drehmomentregelung | Drehmomentregelung | Mäßig | Hoch | Materialprüfung |
| Positionssteuerung | Positionsgenauigkeit | Hoch | Niedrig | Robotik, CNC |
Die besonderen Anforderungen Ihrer Anwendung spielen eine wichtige Rolle bei der Bestimmung der besten Steuerungsstrategie für einen Servomotor. Ob Sie nun Präzision bei der Position, konstante Geschwindigkeit oder genaue Drehmomentregelung suchen, jede Methode bietet unterschiedliche Vorteile und Kompromisse. Damit Ihr System so effizient und effektiv wie möglich arbeitet, müssen die Hersteller von Servomotoren die Unterschiede zwischen diesen Steuerungstechniken verstehen.
