Los motores paso a paso son una parte importante de los sistemas de control de movimiento de precisión. Su valor radica en su capacidad de realizar movimientos discretos controlados en pasos. El rendimiento operativo de un motor paso a paso está estrechamente relacionado con su configuración de fase, un concepto fundamental que determina la cantidad de pasos por revolución, la generación de par y la suavidad de funcionamiento.
¿Qué significa la fase de un motor paso a paso?
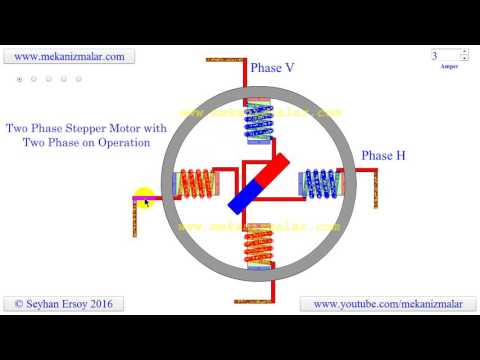
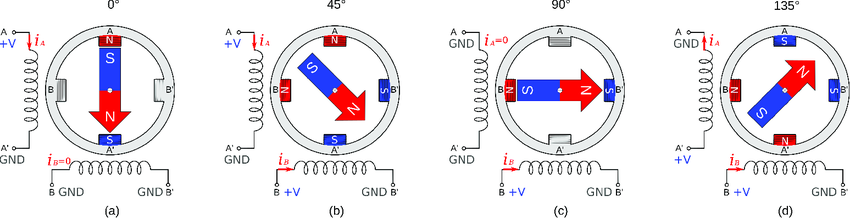
Una fase en un motor paso a paso se refiere a un devanado individual, o bobina, en el estator. El estator es la parte estacionaria del motor, donde la energía eléctrica se convierte en movimiento mecánico. Cada fase se activa secuencialmente para crear un campo magnético giratorio, que arrastra el rotor (un imán permanente dentado o núcleo de hierro) junto con ella. A medida que el campo magnético se mueve paso a paso, también lo hace el rotor, lo que da como resultado el movimiento paso a paso característico del motor. La cantidad de fases en un motor paso a paso afecta directamente el comportamiento del motor. Por ejemplo, las configuraciones comunes incluyen motores paso a paso bifásicos, trifásicos y pentafásicos, cada uno con sus propias características de rendimiento.
Motores paso a paso bifásicos
Los motores paso a paso bifásicos son el tipo más común, en particular en aplicaciones de rendimiento bajo a medio. Están disponibles en dos configuraciones de bobinado principal: unipolar y bipolar.
Motores paso a paso unipolares
En los motores paso a paso unipolares, cada devanado de fase se divide en dos mitades con una toma central. Se puede cargar de manera eficiente una bobina a la vez gracias a su diseño, que solo permite que la corriente pase por la mitad del devanado a la vez. La ventaja de los motores unipolares es que simplifican los circuitos de control porque no es necesario invertir la dirección de la corriente. Características de los motores unipolares:
- Control simple: los motores paso a paso unipolares son más fáciles de controlar, ya que la corriente no necesita cambiar de dirección.
- Par motor más bajo: debido a que solo se activa la mitad del devanado a la vez, los motores unipolares tienden a producir menos par motor en comparación con los motores bipolares.
- Aplicaciones comunes: se utilizan a menudo en aplicaciones de bajo consumo, como impresoras y máquinas CNC, donde se prioriza la simplicidad y la rentabilidad.
Motores paso a paso bipolares
Por otro lado, los motores paso a paso bipolares utilizan todo el devanado para cada fase, pero requieren que la corriente invierta la dirección. Esto significa que los motores bipolares necesitan un sistema de control más complejo con circuitos de puente en H para gestionar la dirección de la corriente. Sin embargo, debido a que se utilizan ambas mitades del devanado, los motores paso a paso bipolares producen más par que sus contrapartes unipolares. Características de los motores bipolares:
- Mayor par motor: se utiliza el devanado completo, por lo que el motor genera más par motor que un motor unipolar del mismo tamaño.
- Control más complejo: requiere circuitos de puente H para invertir la dirección de la corriente.
- Aplicaciones comunes: los motores paso a paso bipolares se utilizan en aplicaciones de mayor rendimiento, como la automatización industrial, la robótica y las impresoras 3D de alta gama.
Motores paso a paso trifásicos
Los motores paso a paso trifásicos son menos comunes que los motores bifásicos, pero ofrecen varias ventajas, en particular en términos de suavidad de funcionamiento y generación de par. El mayor número de fases permite una rotación más continua del campo magnético, lo que genera un movimiento más suave y menos vibración. Características de los motores paso a paso trifásicos:
- Funcionamiento suave: cuantas más fases haya, más suave será la transición entre los pasos, lo que genera menos vibraciones.
- Mayor eficiencia: los motores paso a paso trifásicos son más eficientes y pueden generar más par para una entrada de potencia determinada en comparación con los motores bifásicos.
- Requisitos de control complejos: aunque el rendimiento del motor mejora con más fases, los circuitos de control se vuelven más complejos y requieren controladores más sofisticados.
- Aplicaciones comunes: estos motores se utilizan a menudo en aplicaciones de alta precisión, como equipos médicos, donde el movimiento suave y el par elevado son fundamentales.
Motores paso a paso de cinco fases
Los motores paso a paso de cinco fases ofrecen un nivel de control aún más preciso y son conocidos por ser los más suaves y eficientes de las configuraciones de motores paso a paso. Con más fases, el rotor puede moverse en incrementos más pequeños, lo que aumenta la resolución y reduce aún más las vibraciones. Características de los motores paso a paso de cinco fases:
- Movimiento muy suave: la gran cantidad de fases permite ángulos de paso extremadamente pequeños, lo que da como resultado un funcionamiento muy suave.
- Mayor resolución: los motores de cinco fases pueden lograr pasos de alta resolución, lo que resulta beneficioso en aplicaciones que requieren un posicionamiento preciso.
- Más costosos y complejos: debido a las fases adicionales, estos motores son más costosos y requieren sistemas de control complejos.
- Aplicaciones comunes: cuando se requiere el máximo nivel de precisión, se emplean en maquinaria especializada como máquinas de producción de semiconductores.
Cómo afecta la configuración de fases al rendimiento
La cantidad de fases de un motor paso a paso afecta varias características clave de rendimiento, entre ellas:
Ángulo de paso
La distancia angular que recorre el rotor en un solo paso se conoce como ángulo de paso. Los motores con más fases generalmente tienen ángulos de paso más pequeños, lo que permite un control más preciso de la posición del motor. Un motor paso a paso de dos fases, por ejemplo, puede tener un ángulo de paso de 1,8 grados, lo que significa que una revolución completa requiere 200 pasos. En cambio, un motor de cinco fases podría tener un ángulo de paso tan pequeño como 0,72 grados, lo que permite 500 pasos por revolución.
Esfuerzo de torsión
La generación de par es otro factor crítico influenciado por la configuración de fases. Los motores bipolares, que utilizan ambas mitades de cada devanado, producen más par que los motores unipolares del mismo tamaño. De manera similar, los motores trifásicos y pentafásicos pueden producir un par mayor debido a la naturaleza más continua de su campo magnético.
Suavidad de funcionamiento
Más fases dan como resultado transiciones más suaves entre pasos, lo que reduce la vibración y mejora el rendimiento en aplicaciones que requieren precisión. Los motores pentafásicos suelen ser los más suaves, seguidos de los trifásicos y, a continuación, de los bifásicos.
Controlar la complejidad
La complejidad del sistema de control aumenta con el número de etapas. Por ejemplo, un motor unipolar bifásico es el más sencillo de controlar, mientras que un motor pentafásico requiere circuitos más sofisticados para gestionar la activación de los devanados.
Conclusión
Para obtener más información sobre la configuración de fases y cómo afecta el comportamiento del motor, consulte a un fabricante de motores paso a paso profesional para garantizar el rendimiento óptimo de los sistemas de control de precisión.