Los motores paso a paso son reconocidos por su precisión y repetibilidad, lo que los convierte en la opción predilecta en automatización, impresión 3D, máquinas CNC y robótica. Sin embargo, sin el controlador de motor paso a paso adecuado, incluso el mejor motor paso a paso puede tener un rendimiento inferior. Como proveedor de motores paso a paso, hemos encontrado innumerables casos en los que las fallas del sistema se debían a controladores incompatibles o de baja potencia.
¿Qué es un controlador de motor paso a paso?
El controlador de motor paso a paso suministra corriente a los devanados según las señales de control. Interpreta los pulsos de paso y dirección de un controlador o microcontrolador (como Arduino, STM32 o PLC) y energiza las bobinas en la secuencia correcta para lograr la rotación.
Funciones clave de un controlador paso a paso:
- Interpretar señales de control (Paso y Dirección)
- Controlar la corriente suministrada a las bobinas
- Habilitar micropasos para un movimiento más suave
- Gestionar la aceleración y desaceleración del motor
- Proteger contra sobrecorriente, sobrecalentamiento y subtensión.
Parámetros clave a tener en cuenta al elegir un controlador
Al seleccionar un controlador de motor paso a paso, primero debe adaptarlo a las características eléctricas y mecánicas de su motor. Estos son los factores esenciales:
Tipo de motor (unipolar vs bipolar)
| Tipo de Motor | Descripción | Requerimiento de Controlador |
| Unipolar | Tiene bobinas con punto central. Más fácil de manejar pero con menos par. | Compatible con controlador unipolar (5 o 6 cables) |
| Bipolar | No tiene punto central, requiere puente H. Ofrece más par. | Necesita controlador bipolar (4 cables) |
Los motores bipolares son más comunes debido a su mejor relación par-tamaño.
Clasificaciones de voltaje y corriente
Haga coincidir los valores nominales de voltaje y corriente del motor y del controlador:
- Corriente (A/fase): El controlador debe soportar la corriente nominal del motor por fase. Elija siempre un controlador con una capacidad de corriente entre un 10 % y un 20 % superior para mayor margen de maniobra.
- Voltaje (V): Un voltaje más alto proporciona un mejor rendimiento a alta velocidad, pero debe mantenerse dentro de los límites del controlador.
-
Ejemplo de Motor Paso a Paso Corriente Nominal Corriente Recomendada del Controlador NEMA 17 (42HS40) 1.5 A 1.7 – 2.0 A NEMA 23 (57BYGH76) 2.8 A 3.0 – 3.5 A
Soporte de micropasos
Los micropasos mejoran la fluidez y la resolución del movimiento. Niveles comunes de micropasos:
| Modo de Micro-paso | Pasos por Revolución (motor de 1.8°) |
| Paso completo | 200 pasos |
| Medio paso | 400 pasos |
| 1/4 de paso | 800 pasos |
| 1/16 de paso | 3200 pasos |
| 1/32 de paso | 6400 pasos |
Más micropasos = movimiento más suave pero requiere señales más precisas y puede reducir ligeramente el torque.
Interfaz de control
Elija un controlador que coincida con su sistema de control:
| Tipo de Control | Interfaz | Uso Típico |
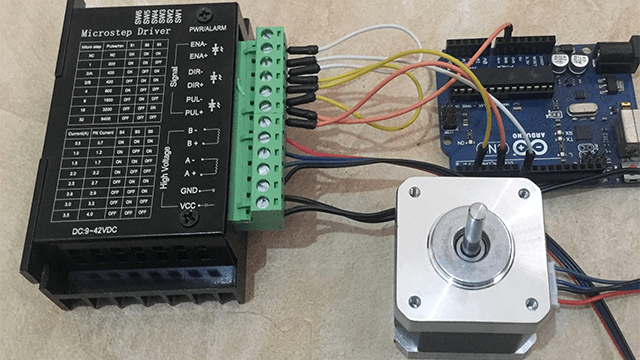
| Paso/Dir | Entrada TTL | Arduino, PLCs, CNC |
| UART/I2C | Bus serial | Control de microcontroladores avanzados |
| USB/CAN | Control por host | Robótica, control industrial |
Para la mayoría de las aplicaciones, el control Paso/Dir es el más sencillo y el que cuenta con mayor respaldo.
Criterios de selección de impulsores clave
Compatibilidad de calificación actual
La corriente nominal del controlador debe coincidir estrechamente con la corriente nominal de fase del motor. Muchos controladores modernos ofrecen ajuste de corriente mediante interruptores DIP o software. Un suministro insuficiente de corriente resulta en un par bajo, mientras que un suministro excesivo puede sobrecalentar el motor.
- Práctica recomendada: elija un controlador que admita al menos un 10 % más de corriente que la corriente nominal del motor, pero nunca exceda la corriente nominal máxima del motor.
Clasificación de voltaje
Un voltaje más alto aumenta la velocidad del motor y el par dinámico, pero también incrementa la disipación de potencia. Asegúrese siempre de que el controlador admita el rango de voltaje requerido por el motor.
- Consejo: si su motor paso a paso tiene una clasificación de 3 V y 2 A, un controlador que funcione a 24 V puede mejorar en gran medida el rendimiento a través de una energización más rápida de la bobina.
Capacidad de micropasos
El micropaso divide los pasos para un movimiento más fluido y una resolución de posición más precisa. Seleccione un controlador según la resolución requerida por su aplicación.
| Modo de Micro-paso | Pasos por Revolución (para motor de 1.8°) |
| Paso completo | 200 |
| Medio paso | 400 |
| 1/4 de paso | 800 |
| 1/8 de paso | 1600 |
| 1/16 de paso | 3200 |
- Consejo de aplicación: utilice micropasos más altos para aplicaciones de precisión como impresoras 3D o posicionamiento de cámaras.
Compatibilidad de la interfaz de control
Asegúrese de que el controlador acepte el formato de señal de control proporcionado por su controlador de movimiento:
- Paso/Dirección (más común para CNC e impresión 3D)
- Modulación por ancho de pulso
- Serie (UART/I²C/SPI)
- Control analógico
- CANopen o EtherCAT para aplicaciones industriales
Tipo de controlador (Chopper vs. unidad L/R)
Descripción del tipo
Controladores L/R: Simples, usan resistencias para limitar la corriente, menos eficientes.
Controladores Chopper: Usan conmutación de alta frecuencia para regular la corriente dinámicamente, más eficientes.
Las unidades chopper son ahora el estándar de la industria debido a su rendimiento y eficiencia.
Elegir el tipo de controlador
Estas son las tecnologías de controlador más comunes:
Controladores L/R (resistencia lineal)
- Simple y de bajo costo
- Ideal para aplicaciones de baja velocidad y bajo rendimiento.
- Eficiencia limitada
Controladores Chopper (control de corriente PWM)
- Utilice modulación de ancho de pulso para controlar la corriente de la bobina
- Más eficiente
- Permite micropasos y control dinámico de corriente.
- Ejemplos: A4988, DRV8825, TB6600
Controladores paso a paso de bucle cerrado
- Incluir un codificador para retroalimentación
- Prevenir pasos en falso
- Ofrece un rendimiento similar al de un servomotor
- Mayor coste, utilizado en aplicaciones exigentes.
-
Tipo de Controlador Costo Retroalimentación Adecuado Para Controlador L/R Bajo No DIY básico o educativo Controlador PWM Medio No Impresoras 3D, CNC, automatización general Controlador de Bucle Cerrado Alto Sí Robótica, movimiento de precisión, cargas pesadas
Tabla de selección de controladores de motores paso a paso
A continuación se muestra una tabla de referencia rápida de motores paso a paso comunes y controladores adecuados:
| Modelo de Motor | Tamaño | Voltaje | Corriente | Modelo de Controlador Adecuado | Micropasos | Notas |
| 42HS40 NEMA 17 | 17 | 12V | 1.5A | A4988, DRV8825 | 1/16 | Bueno para impresoras 3D |
| 57BYGH76 NEMA 23 | 23 | 24–48V | 2.8A | TB6600, DM542 | 1/32 | Router CNC, grabadora láser |
| 86BYG250 NEMA 34 | 34 | 48V | 6.0A | DM860, Leadshine CL86T | Bucle cerrado | Aplicaciones de alta carga |
Características adicionales que se deben buscar
Al elegir un controlador, estas características pueden mejorar el rendimiento y la confiabilidad:
Protección contra sobrecorriente y sobretemperatura
Protege el motor y el controlador contra daños causados por sobrecarga o sobrecalentamiento.
Limitación de corriente ajustable
Permite un ajuste fino para que coincida con las especificaciones del motor y evitar un calentamiento excesivo.
Reducción de la corriente de ralentí
Reduce la corriente cuando el motor está inactivo, disminuyendo el calor y el consumo de energía.
Disipador de calor o ventilador incorporado
Esencial para que los controladores de mayor corriente mantengan la estabilidad de la temperatura.
Coincidencia del controlador con la fuente de alimentación
Asegúrese de que la fuente de alimentación cumpla con las necesidades de voltaje y corriente de ambos.
| Controlador de Motor | Voltaje de Suministro Recomendado | Notas |
| A4988 | 8–35V | Use 12V o 24V para mejor rendimiento |
| DRV8825 | 8.2–45V | Bueno para motores de rango medio |
| TB6600 | 9–42V | Use 24V o superior para más par a alta velocidad |
| DM542 | 18–50V | Grado industrial, excelente para NEMA 23 |
- Regla general: Corriente total = 1,5 x corriente nominal del motor (para margen)
Ejemplos de aplicación
Ejemplo 1: Impresora 3D (NEMA 17 + A4988)
- Bajo par, alta precisión
- Bajo costo, espacio limitado
- Conductora: A4988 o DRV8825
- Alimentación: 12–24 V a 2 A
Ejemplo 2: Enrutador CNC (NEMA 23 + TB6600)
- Par medio, movimiento rápido
- Conductora: TB6600 o DM542
- Potencia: 24–48 V a 4 A
Ejemplo 3: Sistema de cinta transportadora (NEMA 34 + controlador de circuito cerrado)
- Se requiere alto par y retroalimentación
- Conductora: Leadshine CL86T
- Potencia: 48 V a 6–8 A
Errores comunes que se deben evitar
- Corriente del conductor subestimada: puede provocar que se salten pasos o se detenga el movimiento.
- Interfaz de control incorrecta: provoca fallas de comunicación con su microcontrolador o PLC.
- Enfriamiento deficiente: provoca sobrecalentamiento y apagado del controlador.
- Movimiento ruidoso: causado por falta de micropasos o una frecuencia PWM deficiente.
- Sobretensión: daña el aislamiento del controlador o del motor.
Elegir el controlador adecuado no se trata solo de cumplir con las especificaciones. Debe comprender las exigencias de su aplicación, las características del motor y los objetivos de rendimiento. El controlador adecuado garantiza un funcionamiento suave, eficiente y duradero del motor paso a paso.
Ya sea que esté construyendo una impresora 3D para aficionados o un sistema CNC industrial, utilice esta guía para comparar las opciones de controladores en función de la corriente, el voltaje, el método de control, los micropasos y las características de protección.
¿Aún no está seguro? Como proveedor profesional de motores paso a paso y controladores, ofrecemos soporte técnico y le ayudamos a encontrar el controlador ideal para sus necesidades. ¡Contáctenos cuando quiera!