Los motores de engranajes planetarios proporcionan potencia de rotación, mientras que la caja de engranajes planetaria reduce la velocidad y aumenta el par mediante una disposición compacta de los engranajes. Esta estructura permite que los motores de engranajes planetarios ofrezcan un par elevado, una salida estable y una transmisión de potencia eficiente en un espacio reducido.
Se utilizan ampliamente en robótica, equipos de automatización, dispositivos médicos, máquinas de envasado, mobiliario inteligente, vehículos eléctricos y sistemas de movimiento de precisión, ya que pueden proporcionar un par de salida elevado sin necesidad de un motor de gran tamaño.

¿Qué es un motor de engranajes planetarios?
Un motor de engranajes planetarios integra dos componentes clave para ofrecer una velocidad controlada y un par más elevado:
- Motor eléctrico
El motor genera movimiento rotatorio. - Caja de engranajes planetarios
La caja de engranajes ajusta la velocidad y el par antes de la salida.
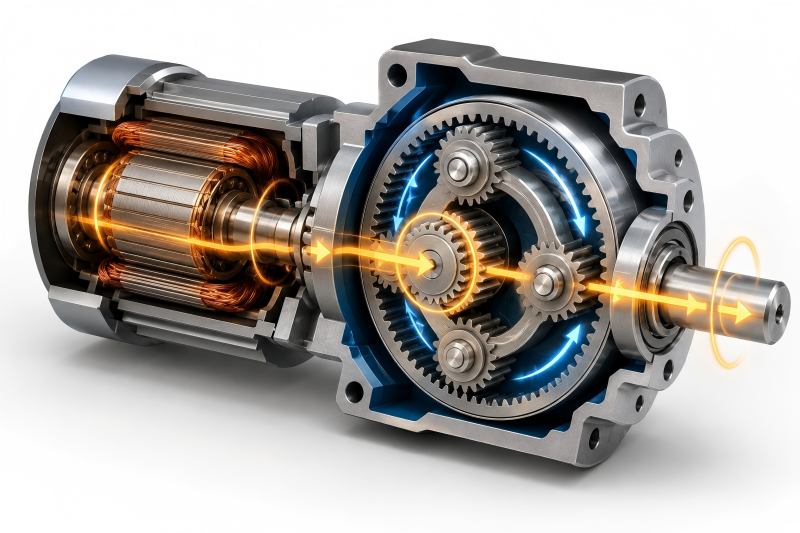
El término «planetario» proviene de la forma en que se mueven los engranajes. En la caja de engranajes, varios engranajes pequeños giran alrededor de un engranaje central, de forma similar a los planetas que giran alrededor del sol.
Componentes principales de un motor de engranajes planetarios
| Componente | Función | Cómo funciona |
| Motor | Proporciona la potencia de entrada | Convierte la energía eléctrica en movimiento giratorio |
| Engranaje solar | Engranaje de accionamiento central | Normalmente conectado al eje del motor |
| Engranajes planetarios | Transfieren la potencia | Giran alrededor del engranaje solar y distribuyen la carga. |
| Corona dentada | Engranaje interno exterior | Engancha externamente con los engranajes planetarios. |
| Portasatélites | Sujeta los engranajes planetarios | Transfiere el movimiento combinado al eje de salida |
| Eje de salida | Transmite el movimiento final | Transmite una velocidad reducida y un par mayor a la máquina |
Principio básico de funcionamiento
Los motores de engranajes planetarios reducen la velocidad al tiempo que aumentan el par para obtener una salida más potente y controlada.
Cuando el motor funciona, hace girar el engranaje solar. El engranaje solar impulsa varios engranajes planetarios que giran a su alrededor. Los engranajes planetarios se acoplan al engranaje anular. A medida que los engranajes planetarios se mueven, hacen girar el portasatélites, que se convierte en la pieza de salida final.
En la mayoría de los motores de engranajes planetarios:
- El motor acciona el engranaje solar.
- La corona dentada permanece fija.
- El portasatélites proporciona la salida.
Esta disposición reduce la alta velocidad del motor y la convierte en una salida más lenta y potente.
Proceso de funcionamiento paso a paso
| Paso | Proceso | Resultado |
| 1 | El motor eléctrico comienza a girar | El eje del motor proporciona una entrada de alta velocidad |
| 2 | El eje del motor acciona el engranaje solar | El engranaje central comienza a girar |
| 3 | El engranaje solar acciona los engranajes planetarios | Varios engranajes giran y distribuyen la carga |
| 4 | Los engranajes planetarios ruedan dentro de la corona dentada | La velocidad se reduce mediante el engranaje |
| 5 | El portasatélites gira | El movimiento combinado de los engranajes se convierte en salida |
| 6 | El eje de salida transmite la potencia | Se produce una velocidad menor y un par mayor |
¿Por qué disminuye la velocidad?
El eje del motor suele girar a alta velocidad. Sin embargo, muchas máquinas no necesitan una velocidad elevada. Necesitan un movimiento controlado y un par más fuerte.
La caja de engranajes planetarios reduce la velocidad mediante la relación de transmisión. Con una relación de 10:1, diez rotaciones del motor producen una rotación de salida.
Esto significa que:
- La velocidad de salida es menor.
- El par de salida aumenta.
- El movimiento es más fácil de controlar.
Ejemplo de reducción de velocidad
| Velocidad del motor | Relación de transmisión | Velocidad de salida |
| 3000 rpm | 3:1 | 1000 rpm |
| 3000 rpm | 5:1 | 600 rpm |
| 3000 rpm | 10:1 | 300 rpm |
| 3000 rpm | 20:1 | 150 rpm |
| 3000 rpm | 50:1 | 60 rpm |
Una relación de transmisión más alta proporciona una velocidad de salida menor y un par mayor.
¿Por qué aumenta el par?
El par proporciona fuerza de giro, mientras que la reducción de velocidad ayuda a que el reductor planetario ofrezca una salida más potente. La potencia mecánica se transfiere a través del acoplamiento de los engranajes, y el eje de salida recibe una fuerza de rotación mayor.
Por ejemplo, si un motor tiene un par limitado, añadir un reductor planetario le permite accionar cargas más pesadas a menor velocidad.
Esto hace que los motores con reductor planetario sean adecuados para:
- Articulaciones robóticas
- Actuadores eléctricos
- Sistemas de transporte
- Equipos de embalaje
- Sistemas de elevación médicos
- Puertas automáticas
- Dispositivos domésticos inteligentes
Distribución de la carga en los motores de engranajes planetarios
Una ventaja importante de los motores de engranajes planetarios es el reparto de carga.
En un sistema de engranajes simple, un par de engranajes suele soportar la mayor parte de la carga. Los múltiples engranajes planetarios distribuyen la carga simultáneamente. Esto hace que la estructura sea más resistente y compacta.
Por ejemplo, si una caja de engranajes tiene tres engranajes planetarios, la fuerza de transmisión se distribuye entre tres puntos de contacto. Esto ayuda a mejorar la capacidad de par y la durabilidad.
| Estructura del engranaje | Distribución de la carga | Efecto sobre el rendimiento |
| Caja de engranajes rectos | La carga pasa principalmente a través de un par de engranajes | Estructura simple, densidad de par limitada |
| Caja de engranajes helicoidales | El contacto deslizante soporta la carga | Alta reducción, menor eficiencia |
| Caja de engranajes planetarios | Varios engranajes planetarios comparten la carga | Alto par, tamaño compacto, salida estable |
Cajas de engranajes planetarios de una y varias etapas
Un motor de engranajes planetarios puede utilizar una o más etapas de engranajes planetarios.
Una caja de engranajes de una sola etapa utiliza un juego completo de engranajes planetarios. Por lo general, ofrece una relación de reducción moderada.
Una caja de engranajes planetarios de varias etapas conecta varias etapas planetarias entre sí. Cada etapa reduce aún más la velocidad y aumenta el par.
| Tipo de caja de engranajes | Rango de relaciones típico | Característica principal |
| Caja de engranajes planetarios de una etapa | 3:1 a 10:1 | Compacta, eficiente, aumento moderado del par |
| Caja de engranajes planetarios de dos etapas | 15:1 a 100:1 | Mayor par, menor velocidad de salida |
| Caja de engranajes planetarios de tres etapas | 100:1 y superior | Velocidad muy baja, par muy alto |
Los diseños multietapa se utilizan cuando la aplicación requiere un movimiento más lento, una fuerza mayor o un posicionamiento más preciso.
Flujo de potencia en el interior de un motor de engranajes planetarios
El flujo de potencia puede entenderse siguiendo un camino sencillo:
Electricidad → Rotación del motor → Engranaje solar → Engranajes planetarios → Portasatélites → Eje de salida
Cada componente cumple una función.
- El motor genera rotación.
- El engranaje solar recibe esa velocidad.
- Los engranajes planetarios transfieren y reducen el movimiento.
- El portasatélites recoge el movimiento.
- El eje de salida proporciona un par útil.
Este flujo de potencia compacto permite que el motor de engranajes planetarios ofrezca un gran rendimiento sin necesidad de una carcasa de caja de cambios de gran tamaño.
Cómo se calcula la relación de transmisión
La relación de transmisión depende principalmente del número de dientes del engranaje solar y del engranaje anular.
En una caja de engranajes planetarios común de anillo fijo, la relación de reducción se puede calcular aproximadamente como:
Relación de transmisión = 1 + Dientes del engranaje anular / Dientes del engranaje solar
Por ejemplo:
| Dientes del engranaje solar | Dientes de la corona | Relación aprox. |
| 20 | 40 | 3:1 |
| 20 | 60 | 4:1 |
| 20 | 80 | 5:1 |
| 15 | 75 | 6:1 |
Este ejemplo simplificado muestra cómo el número de dientes influye en la velocidad y el par.
Por qué los motores de engranajes planetarios son compactos
Los motores de engranajes planetarios son compactos porque los engranajes están dispuestos alrededor del mismo eje central.
El engranaje solar, los engranajes planetarios, el portador y el eje de salida suelen ser coaxiales. Los ejes de entrada y salida pueden alinearse en el mismo eje. En comparación con muchas cajas de engranajes tradicionales, las cajas de engranajes planetarios pueden transmitir un par más alto en un diámetro más pequeño.
Algunos ejemplos típicos son:
- Brazos robóticos
- Bombas médicas
- Pinzas eléctricas
- Actuadores para muebles inteligentes
- Ruedas motrices de pequeños vehículos guiados (AGV)
- Módulos de automatización de precisión
Eficiencia de los motores de engranajes planetarios
Los motores de engranajes planetarios suelen tener una buena eficiencia de transmisión porque el contacto entre los engranajes es principalmente de rodadura. La eficiencia depende del diseño de los engranajes, el número de etapas, la lubricación, la calidad de los rodamientos, la carga y la precisión de fabricación.
| Diseño de la caja de engranajes | Característica típica de eficiencia |
| Caja de engranajes planetarios de una etapa | Mayor eficiencia, menos contactos entre los engranajes |
| Caja de engranajes planetarios de varias etapas | Eficiencia ligeramente inferior, relación de reducción mayor |
| Caja de engranajes planetarios de precisión | Mejor alineación, funcionamiento más suave |
| Caja de engranajes con lubricación deficiente | Mayor fricción, calor y desgaste |
Un motor de engranajes planetarios bien diseñado puede proporcionar un par de salida estable con una pérdida de energía relativamente baja.
Holgura y precisión
El juego es el pequeño espacio entre los dientes de los engranajes. En aplicaciones de control de movimiento, un menor juego significa una mayor precisión de posicionamiento.
Los motores de engranajes planetarios pueden diseñarse con un juego reducido, lo que los hace adecuados para sistemas de precisión. Sin embargo, no todos los motores de engranajes planetarios son iguales. Los motores de engranajes planetarios estándar se centran en el par y el coste, mientras que los motores de engranajes planetarios de precisión se centran en la precisión y la repetibilidad.
| Requisitos de la aplicación | Tipo de motorreductor recomendado |
| Transmisión de par general | Motor de engranajes planetarios estándar |
| Posicionamiento servo | Motorreductor planetario de bajo juego |
| Movimiento de articulaciones robóticas | Motor de engranajes planetarios de alta precisión |
| Automatización con atención al coste | Motor de engranajes planetarios estándar o económico |
| Equipos médicos o de laboratorio | Motor de engranajes planetarios compacto de precisión |
Ventajas de funcionamiento de los motores de engranajes planetarios
El principio de funcionamiento de los motores de engranajes planetarios ofrece varias ventajas prácticas.
Alta densidad de par
Varios engranajes planetarios distribuyen la carga, lo que permite un par más elevado en una caja de engranajes compacta.
Estructura compacta
El diseño coaxial ahorra espacio de instalación y facilita la integración del motor en las máquinas.
Transmisión suave
Varios engranajes engranan al mismo tiempo, lo que ayuda a crear una salida estable y una rotación más suave.
Alta relación de reducción
Las cajas de engranajes planetarios multietapa pueden lograr una gran reducción de velocidad manteniendo unas dimensiones compactas.
Buena eficiencia
En comparación con los sistemas de engranajes helicoidales, los motores de engranajes planetarios suelen ofrecer una mayor eficiencia de transmisión.
Compatibilidad flexible con motores
Los reductores planetarios pueden combinarse con motores de CC, motores BLDC, motores paso a paso, servomotores y motores de CA.
Tipos de motores habituales utilizados con reductores planetarios
| Tipo de motor | Característica del motor de engranajes planetarios | Aplicaciones habituales |
| Motor de CC | Control sencillo, rentable | Dispositivos pequeños, actuadores, juguetes, herramientas |
| Motor BLDC | Alta eficiencia, larga vida útil | Robótica, dispositivos médicos, automatización |
| Motor paso a paso | Movimiento por pasos preciso | Impresoras 3D, sistemas de posicionamiento, instrumentos |
| Servomotor | Alta precisión y control dinámico | Máquinas CNC, robótica, máquinas de embalaje |
| Motor de CA | Gran rendimiento industrial | Transportadores, maquinaria pesada, maquinaria |
Cómo funcionan los motores de engranajes planetarios en aplicaciones reales
En robótica, el motor de engranajes planetarios reduce la velocidad del motor y aumenta el par, de modo que la articulación del robot puede moverse con suavidad y transportar carga.
En máquinas de envasado, ayuda a controlar el movimiento de las cintas transportadoras, los sistemas de alimentación y los mecanismos de indexación.
En equipos médicos, proporciona un movimiento compacto y estable para bombas, camas, sistemas de elevación y dispositivos de diagnóstico.
En mobiliario inteligente, permite una elevación, reclinación y posicionamiento suaves con una fuerza controlada.
En la automatización industrial, ayuda a las máquinas a lograr un control preciso de la velocidad, una salida de par estable y un funcionamiento fiable a largo plazo.
Los motores de engranajes planetarios funcionan utilizando una caja de engranajes planetarios para reducir la velocidad del motor y aumentar el par de salida. Dado que varios engranajes planetarios comparten la carga, el sistema puede proporcionar un par elevado en una estructura compacta.
Este principio de funcionamiento hace que los motores de engranajes planetarios sean ideales para aplicaciones que requieren un tamaño compacto, un par elevado, un funcionamiento suave y una transmisión de potencia fiable. Para los compradores B2B, comprender cómo funcionan los motores de engranajes planetarios puede ayudar a seleccionar el tipo de motor, la relación de transmisión, el rango de par, el nivel de precisión y la estructura de la caja de engranajes adecuados para diferentes aplicaciones industriales y de automatización.