Was ist der häufigste Fehler bei einem bürstenlosen Gleichstrommotor?
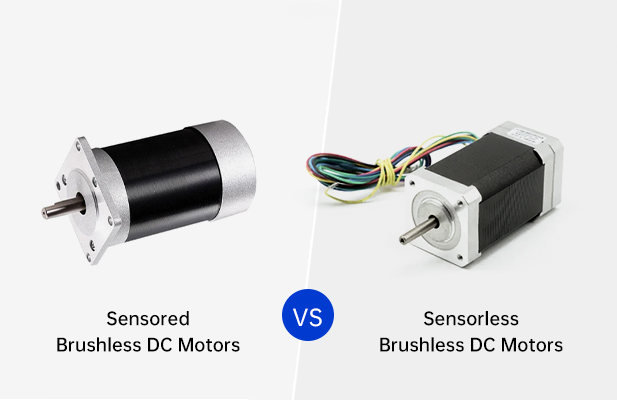
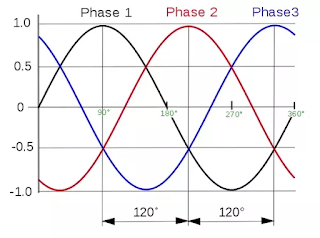
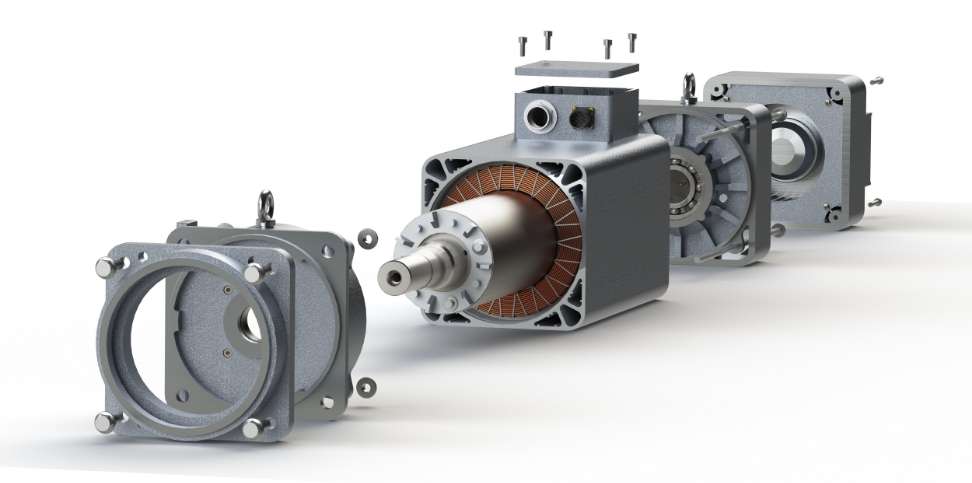
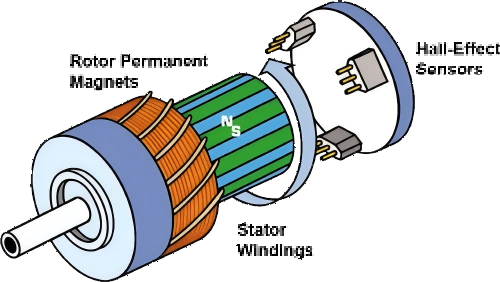
Bürstenlose Gleichstrommotoren (BLDC) werden wegen ihrer Zuverlässigkeit, Effizienz und Langlebigkeit in einer Vielzahl von Anwendungen hoch geschätzt, von Haushaltsgeräten und Industriemaschinen bis hin zu Elektroautos und Drohnen. Trotz ihres robusten Designs sind BLDC-Motoren nicht immun gegen Fehler. Das Verständnis der häufigsten Fehlerarten, ihrer Ursachen und vorbeugenden Maßnahmen ist wichtig, um ihre Langlebigkeit und gleichbleibende Leistung sicherzustellen. Funktionsweise von BLDC-Motoren Um mögliche Fehler zu verstehen, ist es hilfreich, zunächst zu überprüfen, wie ein BLDC-Motor funktioniert. Im Gegensatz zu Bürstenmotoren basieren BLDC-Motoren auf elektronischer Kommutierung, bei der die Stromumschaltung von einem elektronischen Drehzahlregler (ESC) und nicht von physischen Bürsten gesteuert wird. Die Hauptkomponenten des Motors sind wie folgt: Stator: Die stationäre, die Wicklung enthaltende Komponente des Motors. Rotor: Der rotierende Teil mit Permanentmagneten. Hall-Sensoren: Erkennen die Rotorposition für eine präzise Kommutierung (in sensorgesteuerten Motoren). ESC: Steuert Stromfluss, Timing und Geschwindigkeit. Während das Fehlen von Bürsten den Verschleiß verringert, können dennoch Ausfälle in anderen Komponenten oder aufgrund von Betriebsbelastungen auftreten. Die häufigsten Gründe für Ausfälle von BLDC-Motoren Der häufigste Ausfall von BLDC-Motoren ist im Allgemeinen auf Überhitzung zurückzuführen, die häufig zu Schäden an den Wicklungen oder Magneten führt. Es gibt jedoch mehrere andere bedeutende Ausfallarten, darunter elektrische, mechanische und betriebliche Probleme. Überhitzung Überhitzung ist die häufigste Ursache für Ausfälle von BLDC-Motoren. Übermäßige Hitze kann die Isolierung in den Statorwicklungen beeinträchtigen, die Rotormagnete entmagnetisieren oder dauerhafte Schäden an elektronischen Komponenten verursachen. Ursachen für Überhitzung: Überlastung: Übermäßige Hitze entsteht, wenn der Motor über seiner Nennleistung betrieben wird. Schlechte Belüftung: Unzureichende Luftzirkulation oder Kühlmechanismen führen zu Hitzestau. Ineffiziente Wärmeableitung: Mangelndes Wärmemanagement kann zu Hitzestau im Motor führen. Auswirkungen: Verbrannte Wicklungen: Überhitzte Wicklungen können ihre Isolierung verlieren, was zu Kurzschlüssen führt. Entmagnetisierung von Magneten: Permanentmagnete verlieren bei hohen Temperaturen ihre magnetischen Eigenschaften, was die Motorleistung verringert. Vorbeugung: Passen Sie den Motor an die Anwendungslast an. Verwenden Sie geeignete Kühlkörper, Lüfter oder Flüssigkeitskühlsysteme. Überwachen Sie die Betriebstemperaturen mit Wärmesensoren. Isolationsfehler Um elektrische Kurzschlüsse zu verhindern, wird Isoliermaterial auf die Statorwicklungen aufgetragen. Mit der Zeit kann sich diese Isolierung aufgrund thermischer, mechanischer oder elektrischer Belastungen verschlechtern. Ursachen: Thermische Belastung: Ständige Überhitzung schwächt die Isolierung. Mechanische Schäden: Vibrationen oder unsachgemäße Handhabung können die Isolierung beeinträchtigen. Spannungsspitzen: Hohe Spannungsspitzen vom ESC können die Isolierung durchbohren. Auswirkungen: Kurzschlüsse: Führen zu Wicklungsfehlern und Motorschäden. Verringerte Effizienz: Verursacht ungleichmäßige Stromverteilung und höheren Leistungsverlust. Vorbeugung: Verwenden Sie hochwertige Motoren mit langlebigen Isoliermaterialien. Installieren Sie Spannungsregler, um Spannungsspitzen zu verhindern. Minimieren Sie Vibrationen durch sichere Montage und Auswuchten. Lagerausfall Lager ermöglichen eine gleichmäßige Rotation des Rotors. Lagerausfälle durch Verschleiß im Laufe der Zeit können die Motorleistung beeinträchtigen und während des Betriebs Geräusche verursachen. Ursachen: Übermäßige Belastung: Hohe radiale oder axiale Belastungen können Lager belasten. Mangelnde Schmierung: Trockene oder verunreinigte Lager erhöhen die Reibung. Umweltfaktoren: Staub, Feuchtigkeit und Verunreinigungen können Lager korrodieren oder beschädigen. Auswirkungen: Erhöhte Reibung: Führt zu höherem Energieverbrauch und Wärme. Rotorunwucht: Verursacht Vibrationen und Geräusche und kann andere Komponenten beschädigen. Motorblockierung: In schweren Fällen kann der Motor vollständig aufhören zu funktionieren. Vorbeugung: Verwenden Sie Motoren mit hochwertigen abgedichteten Lagern. Führen Sie regelmäßige Wartungs- und Schmierarbeiten durch. Betreiben Sie den Motor innerhalb seiner angegebenen Belastungsgrenzen. Entmagnetisierung von Rotormagneten Permanentmagnete am Rotor sind für die Erzeugung des für die Motorfunktion erforderlichen elektromagnetischen Felds unerlässlich. Entmagnetisierung kann die Motoreffizienz und die Drehmomentabgabe drastisch reduzieren. Ursachen: Überhitzung: Übermäßige Temperaturen schwächen die magnetischen Eigenschaften. Hoher Strom: Länger andauernde Überstrombedingungen können Magnete beschädigen. Mechanische Einwirkung: Physikalische Stöße können Magnete lösen oder schwächen. Auswirkungen: Reduziertes Drehmoment: Die Drehmomenterzeugungskapazität des Motors verringert sich mit abnehmender magnetischer Stärke. Betriebsinstabilität: Verursacht ungleichmäßige Leistung und potenzielle Ausfälle. Vorbeugung: Vermeiden Sie Überhitzung durch geeignete Kühlmechanismen. Verwenden Sie Überstromschutzschaltungen im ESC. Gehen Sie vorsichtig mit dem Motor um, um mechanische Schäden zu vermeiden. Fehlerhafte Hallsensoren oder Encoderprobleme Bei sensorgesteuerten BLDC-Motoren liefern Hallsensoren oder Encoder eine Rückmeldung zur Rotorposition für eine präzise Kommutierung. Fehlerhafte Sensoren können den Motorbetrieb stören. Ursachen: Elektrische Störungen: Rauschen vom ESC oder anderen Komponenten kann die Sensorsignale beeinträchtigen. Physische Schäden: Vibrationen oder Stöße können Sensoren verstellen oder beschädigen. Alterung: Mit der Zeit können Sensoren nachlassen oder ausfallen. Auswirkungen: Verlust der Synchronisierung: Verursacht ruckartige Bewegungen oder Motorstillstände. Erhöhter Stromverbrauch: Führt zu Ineffizienz und potenzieller Überhitzung. Vorbeugung: Verwenden Sie abgeschirmte Kabel, um elektrische Störungen zu minimieren. Befestigen Sie Sensoren sicher, um Vibrationsschäden zu vermeiden. Überprüfen Sie Sensoren regelmäßig und ersetzen Sie fehlerhafte Komponenten. Ausfälle des elektronischen Drehzahlreglers (ESC) Der ESC ist eine wesentliche Komponente eines BLDC-Motorsystems und steuert den Stromfluss und den Kommutierungszeitpunkt. Ein fehlerhafter ESC kann zu unregelmäßiger Motorleistung oder einem vollständigen Ausfall führen. Ursachen: Überstrom: Das Überschreiten der Nennkapazität des ESC kann seine Komponenten beschädigen. Hitzeschäden: Unzureichende Kühlung kann elektronische Komponenten überhitzen und zerstören. Schlechte Qualität: ESCs von geringer Qualität neigen bei hoher Belastung zum Versagen. Auswirkungen: Fehlverhalten des Motors: Kann dazu führen, dass der Motor stottert, Drehmoment verliert oder überhitzt. Dauerhafte Schäden: Ein fehlerhafter ESC kann falsche Signale senden und den Motor möglicherweise beschädigen. Vorbeugung: Wählen Sie einen ESC mit einer geeigneten Nennstromstärke für Ihren Motor. Stellen Sie eine ausreichende Kühlung des ESC sicher. Verwenden Sie namhafte ESC-Marken, um Zuverlässigkeit zu gewährleisten. Mechanische Fehlausrichtung Die richtige Ausrichtung zwischen Stator und Rotor ist für einen effizienten Motorbetrieb entscheidend. Eine Fehlausrichtung kann zu ungleichmäßigem Verschleiß, erhöhtem Lärm und verringerter Leistung führen. Ursachen: Unsachgemäße Montage: Eine falsche Installation kann zu einer Fehlausrichtung von Komponenten führen. Vibration: Übermäßige Vibration während des Betriebs kann Komponenten verschieben. Verschleiß: Komponenten können sich mit der Zeit verschlechtern oder lockern. Auswirkungen: Erhöhte Reibung: Reduziert die Effizienz und beschleunigt den Verschleiß. Vibrationen und Lärm: Unterbrechen den reibungslosen Betrieb und beschädigen Komponenten. Vorbeugung: Stellen Sie bei der Montage die richtige Ausrichtung sicher. Verwenden Sie vibrationshemmende Halterungen, um Bewegungen zu minimieren. Führen Sie regelmäßige Inspektionen und Wartungen durch. So erkennen und diagnostizieren Sie Fehler Durch frühzeitiges Erkennen und Diagnostizieren von Fehlern können kostspielige Reparaturen und Ausfallzeiten vermieden werden. Hier sind häufige Anzeichen für Motorprobleme: Ungewöhnlicher Lärm: Schleifende, klickende oder summende Geräusche können auf Lager- oder Ausrichtungsprobleme hinweisen. Überhitzung: Übermäßige Hitze deutet auf Überlastung oder unzureichende Kühlung hin. Verringerte Leistung: Geringeres Drehmoment oder geringere Drehzahl weisen auf mögliche Wicklungs- oder Magnetprobleme hin. Ruckartige Bewegungen: Weisen