Designüberlegungen für die neue Generation von Getriebemotoren
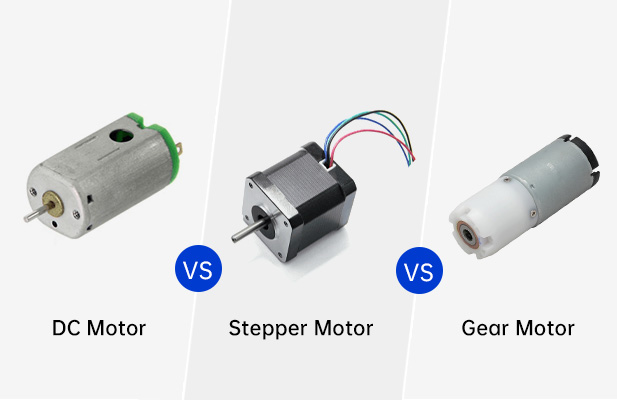
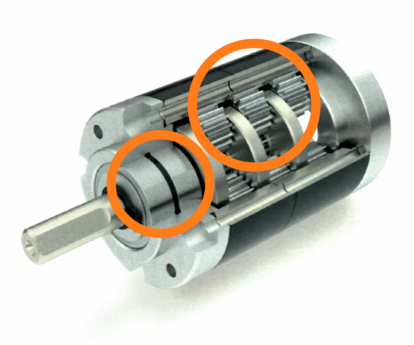
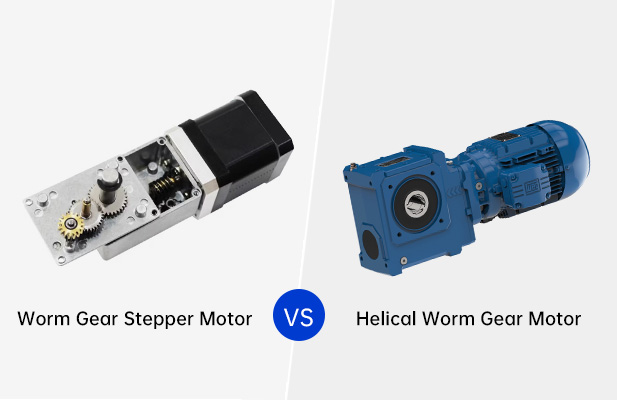
Getriebemotoren sind seit langem unverzichtbare Komponenten moderner mechanischer Systeme. Von Förderbändern in Fabriken bis hin zu Roboterarmen in Fließbändern treiben sie unzählige Anwendungen mit einer Kombination aus Drehmoment, Drehzahlregelung und Präzision an. Angesichts der Weiterentwicklung der Automatisierungstechnologien und der steigenden Nachfrage nach intelligenteren, effizienteren Systemen muss die Konstruktion von Getriebemotoren über traditionelle Ansätze hinausgehen. Ingenieure stehen heute vor neuen Herausforderungen, die sorgfältige Planung und fundierte Entscheidungen in Bezug auf zahlreiche Parameter erfordern – von der Berechnung von Leistung und Drehmoment bis hin zu Lebensdauer, Umweltverträglichkeit und Geräuschdämmung. Leistung und Untersetzungsverhältnis: Die Grundlage schaffen Der erste Schritt bei der Konstruktion eines Getriebemotors besteht darin, die erforderliche Leistung und das Untersetzungsverhältnis festzulegen. Diese beiden Elemente bestimmen maßgeblich die Leistung und Eignung des Getriebemotors für die vorgesehene Aufgabe. Ermitteln Sie zunächst die für die Anwendung erforderlichen Eingangs- und Ausgangswellendrehzahlen. Maschinen erfordern häufig variable Bewegungen, daher ist es entscheidend, einen Drehzahlbereich zu finden, der Flexibilität bietet. Aus diesem Grund ist das Untersetzungsverhältnis ein wichtiger Parameter. Sobald die gewünschte Ausgangsdrehzahl ermittelt ist, kann das Untersetzungsgetriebe entsprechend ausgewählt werden. Es dient als Kernstück, um das die restliche Konstruktion herum aufgebaut wird. Nach der Festlegung der Drehzahlparameter ist es an der Zeit, die erforderliche mechanische Leistung zu berechnen. Dazu müssen das erforderliche Drehmoment und die erforderliche Drehzahl an der Abtriebswelle ermittelt und anschließend der Eingangsleistungsbedarf ermittelt werden. Die Beratung durch einen Getriebemotorhersteller oder -lieferanten kann helfen, diese Werte zu verfeinern, um eine genaue Dimensionierung zu gewährleisten und spätere Ineffizienzen oder mechanische Ausfälle zu vermeiden. Effizienz: Umgang mit Energieverlusten und thermischen Auswirkungen Die Effizienz ist einer der wichtigsten Aspekte bei der Konstruktion von Getriebemotoren. Kühl- und Schmiersysteme erhöhen die Effizienz, indem sie die Reibung verringern und übermäßige Wärmeentwicklung vermeiden. In jedem mechanischen Getriebesystem geht zwangsläufig Energie verloren, typischerweise in Form von Wärme durch Reibung zwischen Zahnrädern und in Lagern. Hocheffiziente Getriebemotoren sind unerlässlich, um den Energieverbrauch zu senken, die Systemleistung zu verbessern und die langfristigen Betriebskosten zu senken. Es ist wichtig zu verstehen, wie sich Getriebetypen und Betriebsbedingungen auf den Energieverlust auswirken: Niedrigtourige Getriebe arbeiten oft mit reduzierter Effizienz und bieten beim Anfahren und Beschleunigen weniger Drehmoment. HAufgrund ihres sanfteren Eingriffs und des geringeren Spiels bieten Stirnradgetriebe im Allgemeinen einen höheren Wirkungsgrad als Stirnradgetriebe. Systeme zur Kühlung und Schmierung erhöhen die Effizienz, indem sie die Reibung verringern und übermäßige Wärmeentwicklung vermeiden. Berücksichtigen Sie beim Entwurf eines Getriebemotors den Betriebszyklus und Lastschwankungen, um Effizienzverluste besser einschätzen und geeignete Materialien und Strategien zum Wärmemanagement auswählen zu können. Starts, Stopps und Servicefaktor: Berücksichtigung der Lastvariabilität Im Gegensatz zu kontinuierlichen Systemen arbeiten viele Maschinen mit häufigen Starts und Stopps, unterschiedlichen Lasten oder wechselnden Geschwindigkeiten. Diese Änderungen wirken sich erheblich auf die mechanische Belastung des Getriebemotors aus und müssen bereits in der frühen Konstruktionsphase berücksichtigt werden. Wenn Motoren ein System aus dem Stillstand beschleunigen, müssen sie vorübergehend ein Drehmoment erzeugen, das deutlich über ihrem Nennbetriebsdrehmoment liegt. Ebenso erfordern Systeme mit häufigen Richtungsumkehrungen oder Drehmomentspitzen Getriebemotoren, die solche Schwankungen ohne vorzeitigen Verschleiß tolerieren. Der Servicefaktor (SF) ist ein numerischer Multiplikator, der diese Variablen berücksichtigt. In einer einfachen Konfiguration, in der ein Elektromotor 8 Stunden am Tag mit weniger als 10 Starts pro Stunde und minimalen Drehmomentschwankungen läuft, könnte der Servicefaktor beispielsweise 1,0 betragen. Anwendungen mit höheren Anforderungen können jedoch einen SF von 1,25 oder mehr erfordern. Hersteller stellen in der Regel Servicefaktordiagramme bereit, die auf folgenden Daten basieren: MMotortyp (z. B. Wechselstrom-, Schritt- oder Servomotor) Anzahl der Starts pro Stunde Tägliche Betriebszeiten Lastvariabilität und Anwendungsart Durch die korrekte Berechnung und Anwendung des Servicefaktors wird sichergestellt, dass der ausgewählte Getriebemotor für den realen Einsatz nicht zu klein ist, wodurch Zuverlässigkeit und Sicherheit verbessert werden. Lärm und Vibrationen: Gewährleistung von Betriebskomfort und Stabilität Um eine hohe Leistung zu erzielen, dürfen Konstrukteure die Geräusch- und Vibrationspegel nicht außer Acht lassen. Für Getriebemotoren in gewerblichen Umgebungen, medizinischen Geräten oder Präzisionsmaschinen gelten oft strenge akustische Anforderungen. Die Getriebegeometrie spielt eine große Rolle bei der Bestimmung des Betriebsgeräusches: Schrägverzahnte Zahnräder sind in der Regel leiser als Stirnräder. Ihre Zähne greifen progressiv ineinander und bleiben länger in Kontakt, was zu einem ruhigeren und leiseren Lauf führt. Stirnräder sind zwar einfacher und kostengünstiger, erzeugen aber aufgrund ihres abrupten Zahneingriffs mehr Lärm. Kegel- und Schneckengetriebe können je nach Anwendung und Geschwindigkeit zusätzliche Vibrations- und Geräuschprobleme verursachen. Neben der Geräuschentwicklung sind Stoßbelastung und Vibrationsfestigkeit für die mechanische Integrität wichtig. In Umgebungen mit hoher Stoßbelastung oder wo mechanische Resonanz auftreten kann, können stoßfeste Getriebetypen (auch hier sind Schrägverzahnungen empfehlenswert) und eine solide Getriebegehäusekonstruktion die Lebensdauer der Geräte verlängern und Ausfälle verhindern. Die Geräuschunterdrückung wird auch unterstützt durch: Präzisionsfertigung zur Reduzierung des Zahnradspiels Richtige Ausrichtung und Wellenauswuchtung Hochwertige Materialien, die Vibrationen dämpfen Wenn Lärm ein großes Problem darstellt, empfiehlt sich die Wahl von Getriebemotoren mit integrierten Dämpfungsfunktionen und spielarmen Konfigurationen. Langlebigkeit und Wartung: Design für die Zukunft Die Lebensdauer eines Getriebemotors wird von verschiedenen Faktoren beeinflusst, darunter Drehzahl, Drehmoment, Einschaltdauer, Materialauswahl und Umgebungsbedingungen. Da die Anwendungen immer komplexer werden und Ausfallzeiten kostspieliger werden, ist die Gewährleistung langfristiger Zuverlässigkeit unerlässlich. Zu den Faktoren, die die Lebensdauer beeinflussen, gehören: Materialbeständigkeit: Zahnräder aus gehärtetem Stahl und Legierungen halten hohen Belastungen stand und reduzieren den Verschleiß. Oberflächenbehandlung: Verfahren wie Nitrieren oder Aufkohlen verbessern die Oberflächenhärte und erhöhen die Ermüdungsbeständigkeit. Schmierung: Durch die richtige Schmierung werden Reibung und Wärmeentwicklung, eine der Hauptursachen für Getriebeausfälle, minimiert. Lagerauswahl: Hochwertige Wälzlager reduzieren die Reibung und erhöhen die Effizienz und Lebensdauer des Getriebemotors. Umwelteinflüsse sollten nicht unterschätzt werden. Bedingungen wie extreme Luftfeuchtigkeit, salzhaltige Luft oder hohe Staubkonzentrationen können Korrosion verursachen, Schmierkanäle verstopfen und die Komponentenintegrität beeinträchtigen. Die Abdichtung des Gehäuses und die Auswahl korrosionsbeständiger Materialien sind in solchen Umgebungen unerlässlich. Darüber hinaus zeichnen sich neue Trends in der vorausschauenden Wartung mithilfe intelligenter Sensoren ab. Moderne Getriebemotoren können Zustandsüberwachungssysteme enthalten, die Temperatur, Vibration oder Belastung in Echtzeit erfassen und so vorbeugende Maßnahmen ermöglichen, bevor es zu Ausfällen kommt. Motorintegration: Auswahl des richtigen Antriebssystems Die neue Generation von Getriebemotoren wird häufig mit Schrittmotoren, Servomotoren oder bürstenlosen Gleichstrommotoren kombiniert, die je nach Anwendung jeweils spezifische Vorteile bieten. Schrittmotoren zeichnen sich durch präzise, inkrementelle Bewegungen aus und sind