Schrittmotoren sind eine entscheidende Komponente in Präzisionssteuerungsanwendungen, da sie durch schrittweises Ausführen von Bewegungen genaue Bewegungen und Positionierungen ermöglichen. Unter den verschiedenen Arten von Schrittmotoren stechen der Permanentmagnet-Schrittmotor (PM) und der Schrittmotor mit variabler Reluktanz (VR) aufgrund ihrer einzigartigen Strukturen und Funktionsprinzipien hervor.
Die Arten von Schrittmotoren
Schrittmotoren wandeln elektrische Impulse in mechanische Rotation um und ermöglichen so eine präzise Bewegungssteuerung ohne Rückkopplungssysteme. Die wichtigsten Arten von Schrittmotoren sind:
- Permanentmagnet Schrittmotoren (PM): Diese Motoren verwenden Permanentmagnete im Rotor, um diskrete Schritte zu erzeugen.
- Schrittmotoren mit variabler Reluktanz (VR): Diese Motoren funktionieren, indem sie magnetische Reluktanz anstelle von Permanentmagneten im Rotor verwenden.
- Hybrid Schrittmotoren: Eine Kombination aus PM- und VR-Designs, die eine verbesserte Präzision bietet. Aus Sicht eines Controllers sind Hybride jedoch PM-Schrittmotoren ähnlich.
Wichtige Unterschiede zwischen PMSM und VRSM
| Aspekt | Permanentmagnet-Schrittmotor (PMSM) | Schrittmotor mit variabler Reluktanz (VRSM) |
| Rotorzusammensetzung | Permanentmagnet | Weicheisenkern |
| Funktionsprinzip | Magnetische Wechselwirkung zwischen Statorfeld und Rotorpolen | Rotor richtet sich aus, um die magnetische Reluktanz zu minimieren |
| Haltedrehmoment | Hoch aufgrund des permanenten Magnetfelds | Niedriger, abhängig von magnetischer Anziehung |
| Schrittgenauigkeit | Hoch, bietet normalerweise einen gleichmäßigeren Betrieb und eine höhere Auflösung | Niedriger, aufgrund der Abhängigkeit von der Ausrichtung der magnetischen Reluktanz |
| Rastdrehmoment | Vorhanden (Motor hält seine Position ohne Strom) | Nicht vorhanden (Rotor kann sich frei drehen, wenn er nicht mit Strom versorgt wird) |
| Kosten | Höher aufgrund der Verwendung von Permanentmagneten | Niedriger, einfachere Konstruktion ohne Permanentmagnete |
| Anwendungen | Wird in Anwendungen verwendet, die hohe Präzision und Drehmoment erfordern | Geeignet für Anwendungen, die eine einfachere Bewegungssteuerung zu geringeren Kosten erfordern |
| Drehmoment-Trägheitsverhältnis | Im Allgemeinen hoch, wodurch es effektiv für schnelle Beschleunigung und Verzögerung ist | Niedriger, daher weniger geeignet für Hochgeschwindigkeitsanwendungen |
Strukturelle Unterschiede
Das Verständnis der Struktur dieser Motoren gibt Aufschluss über ihr Betriebsverhalten.
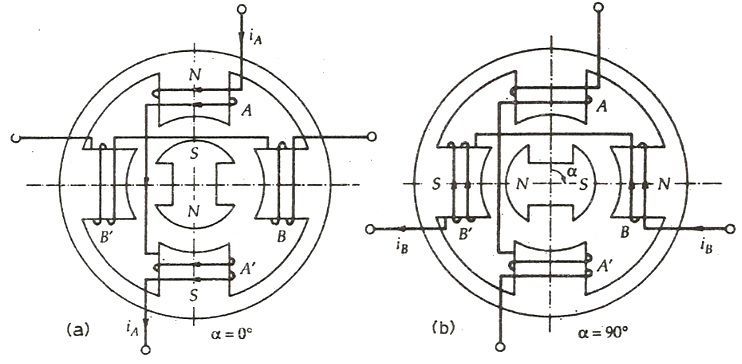
Permanentmagnet Schrittmotor
Im Rotor von PM-Schrittmotoren eingebaute Permanentmagnete interagieren mit dem elektromagnetischen Feld des Stators. Dieses Design verleiht dem Rotor einen „Rast“-Effekt, was bedeutet, dass er dazu neigt, in festen Positionen zu bleiben, auch wenn er nicht mit Strom versorgt wird. Die Bewegung des Rotors fühlt sich aufgrund der magnetischen Anziehung zwischen dem Rotor und den Statorpolen beim manuellen Drehen wie ein Getriebe oder eine Kerbe an.
Wicklungskonfiguration:
- Normalerweise hat er zwei separate Wicklungen, entweder mit oder ohne Mittelanzapfung.
- Kann mit einem Ohmmeter identifiziert werden, da es zwei separate Wicklungen ohne gemeinsame Rückleitung anzeigt.
Winkelauflösung:
- PM-Schrittmotoren können feinere Schrittauflösungen erreichen, die je nach Modell und Konfiguration oft von 1,8 Grad pro Schritt bis hin zu 0,72 Grad pro Schritt reichen.
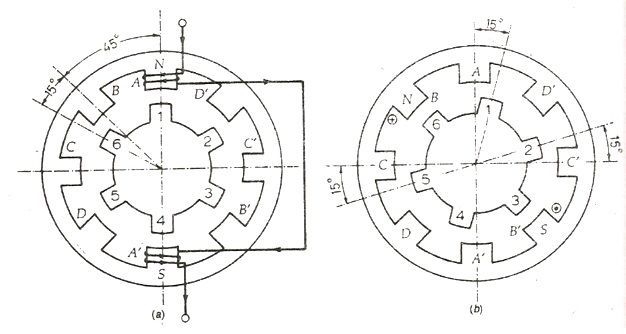
Schrittmotor mit variabler Reluktanz
Der Rotor von VR-Schrittmotoren ist jedoch frei von Permanentmagneten. Stattdessen besteht der Rotor aus Weicheisen oder ferromagnetischem Material, das sich bei Stromzufuhr mit den Statorpolen ausrichtet, wodurch die magnetische Reluktanz minimiert und eine Drehbewegung erzeugt wird. Ohne Strom drehen sich VR-Motoren normalerweise freier, mit nur geringem Widerstand aufgrund der Restmagnetisierung im Rotor.
Wicklungskonfiguration:
- VR-Motoren haben oft drei oder vier Wicklungen mit einer gemeinsamen Rückleitung. Dies kann mit einem Ohmmeter bestätigt werden, da es mehrere Wicklungen zeigt, die sich einen einzigen Rückleitungspfad teilen.
Winkelauflösung:
- VR-Schrittmotoren haben im Allgemeinen gröbere Schrittwinkel als PM-Schrittmotoren. Der typische Schrittwinkel für VR-Motoren ist höher, beispielsweise 15 oder 30 Grad pro Schritt, was ihre Auflösung für Anwendungen begrenzt, die eine feinere Steuerung erfordern.
Identifizierung von PM- und VR-Schrittmotoren
Wenn das Etikett auf einem Schrittmotor fehlt, kann die Unterscheidung zwischen PM- und VR-Schrittmotoren durch einfache Beobachtungen und Tests erfolgen: Um den Rotor manuell zu testen, drehen Sie ihn mit Ihren Fingern.
- PM-Schrittmotor: Der Rotor fühlt sich aufgrund der magnetischen Anziehung der Permanentmagnete verzahnt oder eingekerbt an.
- VR-Schrittmotor: Der Rotor dreht sich freier und mit minimalem Widerstand.
Ohmmeter-Test: Untersuchen Sie die Wicklungskonfiguration mit einem Ohmmeter.
- PM-Schrittmotor: Hat normalerweise zwei unabhängige Wicklungen.
- VR-Schrittmotor: Hat normalerweise drei oder vier Wicklungen mit einer gemeinsamen Rückleitung.
Betrieb und Haltedrehmoment
Sowohl PM- als auch VR-Schrittmotoren verriegeln den Rotor in einem festen Winkel, wenn mindestens eine Wicklung aktiviert ist. Dieses Haltedrehmoment ist entscheidend für Anwendungen, bei denen der Motor seine Position beibehalten muss, während er stillsteht.
- PM-Schrittmotoren: Bietet mehr Haltedrehmoment aufgrund des magnetischen Kontakts der Permanentmagnete von Stator und Rotor. Dieses Haltedrehmoment ermöglicht es dem Motor, äußeren Kräften bis zu einem bestimmten Punkt zu widerstehen, bevor das Drehmoment überschritten wird.
- VR-Schrittmotoren: Haben ein geringeres Haltedrehmoment im Vergleich zu PM-Schrittmotoren, da der Rotor keine Permanentmagnete hat. Der Halteeffekt wird ausschließlich durch die aktivierten Statorpole erzeugt, die sich mit den Rotorzähnen ausrichten.
Winkelauflösung und Mikroschritt
Schrittmotoren können in ihrer Schrittauflösung stark variieren. Die Wahl zwischen einem PM-Schrittmotor und einem VR-Schrittmotor hängt oft von der erforderlichen Präzision ab:
- PM-Schrittmotoren: Bieten normalerweise feinere Schrittauflösungen, wie 1,8 oder 0,72 Grad pro Schritt. Mit fortschrittlichen Controllern können PM-Motoren im Halbschritt- oder Mikroschrittmodus betrieben werden, was noch kleinere Schritte und sanftere Bewegungen ermöglicht.
- VR-Schrittmotoren: Bieten im Allgemeinen gröbere Schrittwinkel, wie 15 oder 30 Grad pro Schritt, was ihren Einsatz in hochpräzisen Anwendungen einschränkt.
Anwendungen und Eignung
Die Wahl zwischen PM- und VR-Schrittmotoren hängt von den spezifischen Anforderungen der Anwendung ab:
Permanentmagnet-Schrittmotoren
Vorteile:
- Hohe Präzision mit finere Schrittauflösungen.
- Sie eignen sich aufgrund ihres größeren Haltedrehmoments für Anwendungen, die eine hohe Positionsgenauigkeit erfordern.
Einschränkungen:
- Komplexer und möglicherweise teurer als VR-Motoren.
Anwendungsfälle:
- Drucker, Roboter und Präzisionsinstrumente, bei denen eine gleichmäßige, kontrollierte Bewegung unerlässlich ist.
Schrittmotoren mit variabler Reluktanz
Vorteile:
- Einfachere Konstruktion, was häufig zu geringeren Kosten führt.
- Weniger komplexe Wicklungskonfigurationen im Vergleich zu Hybriddesigns.
Einschränkungen:
- Sie eignen sich aufgrund ihrer gröberen Schrittauflösung und ihres schwächeren Haltedrehmoments weniger für hochpräzise Anwendungen.
- Freie Rotation ohne Strom kann bei Anwendungen, die eine stationäre Halterung erfordern, ein Nachteil sein.
Herausforderungen bewältigen und Leistung verbessern
Für beide Motortypen kann die Gewährleistung einer optimalen Leistung Anpassungen und Verbesserungen erfordern:
Verbesserung der Schrittmotorleistung
- PM-Schrittmotoren: Verwenden Sie Mikroschritttreiber, um einen gleichmäßigeren Betrieb und kleinere Schrittgrößen zu erreichen. Dies verringert die Möglichkeit einer Resonanz bei niedrigen Geschwindigkeiten und ermöglicht eine genauere Kontrolle der Bewegung.
- VR-Schrittmotoren: Kombinieren Sie sie mit gut abgestimmten Steuerungen, die die Drehmomentverteilung für einen reibungsloseren Betrieb optimieren können.
Handhabung von Last- und Drehmomentanforderungen
- PM-Motoren: Stellen Sie sicher, dass das Drehmoment des Motors für die zu bewegende Last ausreicht. Anwendungen mit hoher Last können von Motoren mit höheren Drehmomentwerten oder Untersetzungsmechanismen profitieren.
- VR-Motoren: Wählen Sie VR-Schrittmotoren für Anwendungen mit geringeren Drehmomentanforderungen, da ihr einfacheres Design kostengünstiger sein kann.
Fazit
Während sowohl Permanentmagnet-Schrittmotoren als auch Schrittmotoren mit variabler Reluktanz effektive Lösungen für die Bewegungssteuerung darstellen, sind sie aufgrund ihrer unterschiedlichen Eigenschaften für unterschiedliche Anwendungsarten geeignet. Hersteller von Schrittmotoren betonen, dass PM-Schrittmotoren eine höhere Präzision, ein besseres Haltedrehmoment und eine feinere Schrittauflösung bieten, was sie zur ersten Wahl für Präzisionsaufgaben macht. Umgekehrt sind VR-Schrittmotoren einfacher zu verwenden und weniger teuer, was sie für Anwendungen geeignet macht, bei denen ein hohes Drehmoment und eine hohe Auflösung nicht unbedingt erforderlich sind.
