Innenläufer- vs. Außenläufer-BLDC-Motoren: Welcher Motortyp eignet sich besser für Rasenmähroboter?
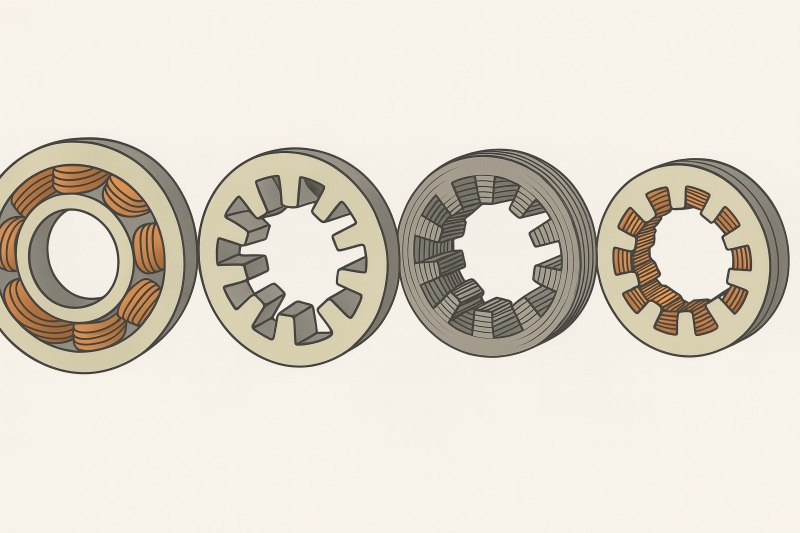
Die Bedeutung von Motoren in Mährobotern Der Motor ist das Herzstück jedes Mähroboters. Er wandelt elektrische Energie in mechanische Bewegung um und treibt so sowohl die Schneidmesser als auch die Räder an, die den Mäher über den Rasen bewegen. Mit dem Aufkommen von Smart-Home-Automatisierung und autonomen Gartenrobotern ist die Motorleistung zu einem entscheidenden Faktor für Schnittqualität, Laufzeit und Zuverlässigkeit geworden. Früher dominierten herkömmliche Bürsten-Gleichstrommotoren die Kleinrobotertechnik, doch ihre begrenzte Lebensdauer, der Bürstenverschleiß und die Energieverluste machten sie für moderne Mähroboter ungeeignet. BLDC-Motoren bieten Effizienz, leisen Betrieb und minimalen Wartungsaufwand. Diese Motoren nutzen elektronische Kommutierung anstelle von Bürsten, wodurch Reibungsverluste eliminiert und die Lebensdauer verlängert wird – ein entscheidender Vorteil für Mähroboter im Außenbereich, die lange Mähzyklen unter wechselnden Lasten absolvieren müssen. Unter Elektromotor für RasenmäherInnenläufer- und Außenläufermotoren stellen zwei unterschiedliche Bauarten dar. Beide nutzen dieselben elektromagnetischen Prinzipien, unterscheiden sich jedoch in der Rotoranordnung und den Leistungseigenschaften. Die Wahl des Motortyps kann darüber entscheiden, ob ein Rasenmäher auch auf unebenem Gelände reibungslos läuft, nasses Gras effektiv mäht oder den Akku vorzeitig entlädt. Motoranforderungen für Mähroboter Die Einsatzbedingungen für einen Mähroboter sind anspruchsvoll. Er muss mit hohem oder feuchtem Gras zurechtkommen, leise arbeiten und Hänge bewältigen und dabei so wenig Energie wie möglich verbrauchen. Diese Bedingungen führen zu spezifischen Leistungsanforderungen an die Motoren. Hohes Drehmoment bei niedrigen Drehzahlen Das Antriebssystem benötigt Drehmoment, um den Mäher durch dichtes oder nasses Gras zu bewegen, insbesondere beim Bergauffahren oder Manövrieren auf unebenem Gelände. Stabile Drehzahl und reibungsloser Betrieb Der Messermotor muss eine konstante Schnittgeschwindigkeit aufrechterhalten, typischerweise zwischen 3.000 und 4.000 U/min, um ein gleichmäßiges Trimmen zu gewährleisten und ein Einreißen des Grases zu vermeiden. Energieeffizienz Da Mähroboter auf Batterien angewiesen sind, müssen die Motoren effizient arbeiten, um die Laufzeit vor dem Aufladen zu maximieren. Leiser Betrieb Lärmreduzierung ist für den Komfort der Verbraucher und die Einhaltung der Lärmschutzbestimmungen im Wohnbereich von entscheidender Bedeutung. Langlebigkeit und Witterungsbeständigkeit Motoren müssen im Freien Staub, Feuchtigkeit und Temperaturschwankungen standhalten. Kompakte Integration Die Größe und das Gewicht des Motors beeinflussen direkt das Gleichgewicht, die Manövrierfähigkeit und das Gesamtleistungsgewicht des Roboters. Diese Kriterien beeinflussen, ob eine Innenläufer- oder Außenläuferkonfiguration für die jeweilige Funktion des Mähers besser geeignet ist. Vor- und Nachteile von Innenrotoren in Mährobotern Innenläufer-BLDC-Motoren zeichnen sich durch einen rotierenden Innenrotor aus, der von einem stationären Stator umgeben ist. Ihre zylindrische Bauweise ist kompakt und mechanisch robust und ermöglicht hohe Drehzahlen sowie eine präzise Steuerung. Vorteile Hochgeschwindigkeitsleistung Innenläufermotoren sind für hohe Drehzahlen optimiert und erreichen oft über 10.000 Umdrehungen pro Minute. Dadurch eignen sie sich ideal für Schneidklingen, da die hohe Drehzahl einen sauberen und effizienten Schnitt ermöglicht. Kompaktes Design Durch ihren geringeren Durchmesser und den geschlossenen Rotor lassen sie sich leichter in beengte Räume integrieren – ideal für kleinere Roboterplattformen. Präzise Steuerung Die geringe Trägheit des Rotors ermöglicht schnelles Beschleunigen und Abbremsen und unterstützt so eine präzise Drehzahlregelung. Wirksame Abdichtung gegen Schmutz Da der Rotor im Inneren liegt, lassen sich diese Motoren besser gegen Staub, Feuchtigkeit und Grasschnitt abdichten – ein wertvolles Merkmal für den Einsatz im Freien. Geringer Wartungsaufwand und lange Lebensdauer Keine Bürsten bedeuten geringeren Verschleiß, und ihre robuste Innenkonstruktion schützt die internen Komponenten bei längeren Mähvorgängen. Nachteile Niedriges Drehmoment Der kleine Rotorradius begrenzt die Drehmomenterzeugung, weshalb bei Radantriebsanwendungen eine zusätzliche Getriebeuntersetzung erforderlich ist. Kühlungsherausforderungen Die Position des Rotors im Stator erschwert die Wärmeableitung. Dies kann die Leistung bei längeren oder intensiven Mähvorgängen beeinträchtigen, sofern keine zusätzliche Kühlung eingesetzt wird. Höhere Kosten und Komplexität Um ein ausreichendes Drehmoment zu erzielen, sind oft Präzisionsgetriebe erforderlich, was die Systemkosten und die mechanische Komplexität erhöht. Bei niedrigen Geschwindigkeiten weniger energieeffizient Ihre Effizienz erreicht ihren Höhepunkt bei hohen Drehzahlen, wodurch sie für langsame, kontinuierliche Radbewegungen weniger geeignet sind. Kurz gesagt, Innenläufermotoren glänzen bei der Rotorblattrotation oder in kompakten Hilfsmechanismen, sind aber nicht immer die beste Wahl für Antriebssysteme, bei denen das Drehmoment entscheidend ist. Vor- und Nachteile von Außenrotoren bei Mährobotern Außenläufer-BLDC-Motoren kehren die Bauweise von Innenläufermotoren um: Der Rotor befindet sich außen und rotiert um den inneren Stator. Diese Konstruktion ermöglicht einen größeren Durchmesser und einen längeren magnetischen Weg, was das Drehmoment direkt erhöht – ein wesentlicher Vorteil für den Antrieb. Vorteile Hohes Drehmoment bei niedrigen Drehzahlen Der größere Rotorradius und die magnetische Hebelwirkung ermöglichen ein hohes Drehmoment ohne komplexe Getriebeuntersetzungssysteme und sind somit ideal für Radantriebsmotoren geeignet. Natürliche Luftkühlung Da sich der Rotor außen dreht, trägt er zu einer effektiven Wärmeableitung bei und gewährleistet so einen stabilen Betrieb auch im Freien. Effizient für den kontinuierlichen Betrieb bei niedriger Drehzahl Außenläufermotoren behalten auch bei niedrigeren Drehzahlen eine hohe Effizienz bei und verlängern so die Akkulaufzeit bei längeren Mähzyklen. Gleichmäßiger Lauf und starke Anlaufleistung Sie bieten eine stabile Rotationskraft auch unter variablen Lastbedingungen wie dichtem oder unebenem Gras. Einfacheres Design, geringerer Wartungsaufwand Ohne zusätzliche Getriebeübersetzungen können die Außenläufer direkt mit Rädern oder Schaufeln gekoppelt werden, wodurch die mechanischen Verluste reduziert werden. Nachteile Größere Größe und höheres Gewicht Durch ihren größeren Durchmesser können kompakte Mähwerke schwieriger konstruiert werden, insbesondere Mehrrotor-Konfigurationen. Gefährdung durch Trümmer Da sich der äußere Rotor nach außen dreht, ist beim Abdichten gegen das Eindringen von Graspartikeln oder Staub besondere Sorgfalt geboten. Reduzierte maximale Drehzahl Außenläufermotoren arbeiten typischerweise mit Drehzahlen unter 6.000 U/min, wodurch sie für schnell rotierende Schneidmesser weniger effizient sind, sofern sie nicht optimiert werden. Trägheitseffekte Der schwerere äußere Rotor erhöht das Massenträgheitsmoment und verlangsamt so schnelle Geschwindigkeitsänderungen bzw. Bremsreaktionen. Trotz dieser Kompromisse bietet die Außenläuferbauweise ein überlegenes Drehmoment, eine höhere Haltbarkeit und eine bessere Kühlung für Traktionssysteme und ist daher die bevorzugte Wahl für den Antrieb von Mährobotern. Vergleichstabelle Innenläufer- vs. Außenläufermotoren Besonderheit Innenläufer-BLDC-Motor Außenläufer-BLDC-Motor Rotorposition Im Inneren des Stators Außerhalb des Stators Drehmomentausgang Mittel bis niedrig Hoch Geschwindigkeitsbereich Hohe Drehzahl (10.000+) Niedrige bis mittlere Drehzahl (2.000–6.000 U/min) Effizienzbereich Am besten bei hoher Geschwindigkeit Am besten bei niedriger bis mittlerer Geschwindigkeit Kühlung Intern, weniger effektiv Natürliche Luftkühlung Geräuschpegel Etwas höher Niedrigere, gleichmäßigere Rotation Größe und Gewicht Kleinerer Durchmesser, leichter Größerer Durchmesser, höheres Gewicht Eignung für den Anwendungsbereich Klingenmotoren, Kompaktwerkzeuge Antriebsmotoren, Lastanwendungen Wartung Minimal Minimal, erfordert aber Abdichtung Steuerungspräzision Exzellent Mäßig Kostenniveau Etwas höher (Getriebe erforderlich) Untere