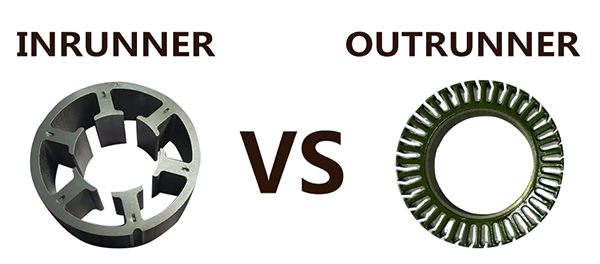
Outrunner vs. Bürstenloser Innenläufer-Gleichstrommotor: A Comprehensive Comparison
Was ist ein BLDC-Außenläufermotor? Ein bürstenloser Gleichstrommotor mit dem Rotor außen und dem Stator innen wird als bürstenloser Außenläufermotor bezeichnet. Diese Konstruktion steht im Gegensatz zu herkömmlichen Motoren, bei denen sich der Rotor normalerweise im Stator befindet. Die Außenläuferkonstruktion bietet bestimmte Leistungsvorteile, insbesondere bei der Erzeugung eines höheren Drehmoments. Schlüsselkomponenten Außenläufer: Der Rotor eines Außenläufermotors befindet sich außen und verfügt normalerweise über Permanentmagnete, die an seiner Innenfläche befestigt sind. Diese äußere Platzierung des Rotors ist entscheidend für die Fähigkeit des Motors, ein hohes Drehmoment zu erzeugen. Innenläufer: Der Stator befindet sich im Rotor und hält die Wicklungen. Wenn elektrischer Strom durch diese Wicklungen fließt, erzeugt er ein Magnetfeld. Wicklungen: Dies sind Drahtspulen im Stator. Sie erzeugen Bewegung, wenn Strom durch sie fließt, und verbinden sich mit dem Magnetfeld des Rotors, um ein elektromagnetisches Feld zu erzeugen. Funktionsprinzip Der Betrieb eines BLDC-Außenläufermotors umfasst die folgenden Schritte: Elektrischer Strom und Magnetfeld: Wenn ein elektrischer Strom durch die Statorwicklungen fließt, erzeugt er ein rotierendes Magnetfeld. Wechselwirkung mit Rotormagneten: Die Permanentmagnete an der Innenfläche des Außenrotors stehen mit diesem rotierenden Magnetfeld in Kontakt. Drehmomenterzeugung: Das durch die Wechselwirkung der Magnetfelder der Rotormagnete und der Statorwicklungen erzeugte Drehmoment bewirkt, dass sich der Rotor dreht. Kontinuierliche Drehung: Der Rotor dreht sich weiter, solange die Statorwicklungen mit Strom versorgt werden, und hält so ein rotierendes Magnetfeld aufrecht, das den Rotor in Bewegung hält. Für und Wider Empfohlenes Produkt Was ist ein bürstenloser Innenläufermotor? Ein Beispiel für einen bürstenlosen Gleichstrommotor (BLDC) mit einem Rotor im Inneren des Stators ist ein bürstenloser Innenläufermotor. Diese herkömmliche Konstruktion steht im Gegensatz zum Außenläufermotor, bei dem der Rotor außen liegt. Innenläufermotoren sind für ihre Fähigkeit bekannt, hohe Drehzahlen zu erreichen, und werden häufig in Anwendungen eingesetzt, bei denen Kompaktheit und hohe Drehzahlen wichtig sind. Funktionsprinzip Der Betrieb eines bürstenlosen Innenläufermotors umfasst die folgenden Schritte: Elektrischer Strom und Magnetfeld: Ein rotierendes Magnetfeld wird durch einen elektrischen Strom erzeugt, der durch die Statorwicklungen fließt. Interaktion mit Rotormagneten: Dieses rotierende Magnetfeld interagiert mit den Permanentmagneten auf der Oberfläche des Rotors. Drehmomenterzeugung: Die Interaktion der elektromagnetischen Felder von Stator und Rotor erzeugt ein Drehmoment, das den Rotor rotieren lässt. Kontinuierliche Rotation: Solange die Statorwicklungen mit Strom versorgt werden, bleibt das rotierende Magnetfeld erhalten und der Rotor dreht sich weiter, wodurch eine kontinuierliche Bewegung erzeugt wird. Hauptkomponenten Innenrotor: Der Rotor befindet sich im Stator und hat Permanentmagnete auf seiner Außenfläche. Die kompakte Anordnung des Rotors ermöglicht eine hohe Rotationsgeschwindigkeit. Außenstator: Die Wicklungen befinden sich im Stator, der den Rotor umgibt. Wicklungen: Bei Aktivierung erzeugen die Drahtspulen im Stator ein elektromagnetisches Feld. Wenn dieses Feld mit dem Magnetfeld des Rotors interagiert, entsteht Bewegung. Für und Wider Empfohlenes Produkt How to choose BLDC Innenläufer Motoren and BLDC Außenläufer Motoren? Hochgeschwindigkeitsanwendungen. Wählen Sie bürstenlose Innenläufermotoren: Gründe: Innenläufermotoren sind für hohe Drehzahlen (U/min) ausgelegt. Aufgrund ihres leichten und kompakten Designs können sie in Situationen eingesetzt werden, in denen eine hohe Effizienz bei hohen Geschwindigkeiten erforderlich ist. Beispiele: Elektrowerkzeuge (Bohrer, Schleifmaschinen), ferngesteuerte Autos und Boote, Hochgeschwindigkeitsroboter, Elektrofahrzeuge (insbesondere in Anwendungen, in denen der Platz begrenzt ist und eine hohe U/min erforderlich ist). Anwendungen mit hohem Drehmoment Wählen Sie bürstenlose Outrunner-Motoren: Gründe: Outrunner-Motoren bieten aufgrund ihres größeren Rotordurchmessers ein höheres Drehmoment. Aufgrund ihrer Stärke und Fähigkeit, große Lasten zu bewältigen, sind sie perfekt für Anwendungen geeignet, die viel Drehmoment erfordern. Beispiele: Drohnen (für Auftrieb und Manövrierfähigkeit), Elektrofahrräder, kardanische Aufhängungssysteme, Industriemaschinen, die ein hohes Drehmoment bei niedrigeren Geschwindigkeiten benötigen. Kompakte und leichte Designs Wählen Sie bürstenlose Innenläufermotoren: Gründe: Innenläufermotoren sind im Allgemeinen kompakter und leichter als Außenläufermotoren, was sie für Anwendungen geeignet macht, bei denen Platz und Gewicht entscheidende Faktoren sind. Beispiele: Robotik (wo Präzision und Kompaktheit entscheidend sind), kleine Elektrofahrzeuge, tragbare Werkzeuge. Anwendungen, die einen reibungslosen Betrieb erfordern Wählen Sie bürstenlose Outrunner-Motoren: Gründe: Outrunner-Motoren laufen tendenziell reibungsloser mit weniger Drehmomentwelligkeit und bieten eine stabile Leistung, die für Anwendungen entscheidend ist, die eine feine Steuerung und gleichmäßige Bewegung erfordern. Beispiele: Kamerakardanringe, medizinische Geräte, Präzisionsinstrumente, Hobbyprojekte, die eine reibungslose und stabile Leistung erfordern. Anforderungen an hohe Effizienz Wählen Sie bürstenlose Innenläufermotoren für hohe Effizienz bei hohen Geschwindigkeiten: Gründe: Innenläufermotoren sind bei hohen Geschwindigkeiten hocheffizient und daher ideal für Anwendungen, bei denen die Aufrechterhaltung der Effizienz bei hohen Drehzahlen entscheidend ist. Beispiele: Hochgeschwindigkeits-Elektrofahrzeuge, Hochleistungs-Elektrowerkzeuge und alle Anwendungen, bei denen ein kontinuierlicher Hochgeschwindigkeitsbetrieb erforderlich ist. Wählen Sie bürstenlose Außenläufermotoren für hohe Drehmomenteffizienz: Gründe: Außenläufermotoren wandeln elektrische Energie effizient in Drehmoment um und sind daher für Anwendungen geeignet, bei denen eine effiziente Drehmomenterzeugung erforderlich ist. Beispiele: Elektrofahrräder, Drohnen (für effizienten Auftrieb und Manövrierfähigkeit) und Anwendungen, bei denen ein anhaltendes Drehmoment erforderlich ist. Umgebungsbedingungen Wählen Sie basierend auf den Kühlanforderungen: Innenläufermotoren: Effektive Kühlung durch den Stator, geeignet für Umgebungen, in denen die Kühlung gesteuert werden kann und hohe Geschwindigkeiten erforderlich sind. Außenläufermotoren: Bessere natürliche Kühlung durch den Außenrotor, daher geeignet für Umgebungen, in denen die Kühlung eine Herausforderung darstellen kann. Fazit Die Wahl zwischen Outrunner- und Inrunner-BLDC-Motoren hängt von Ihren spezifischen Anwendungsanforderungen ab. Für schnelle, kompakte und leichte Anwendungen sind Inrunner-Motoren aufgrund ihrer effizienten Hochdrehzahlfähigkeiten ideal. Umgekehrt zeichnen sich Outrunner-Motoren für einen drehmomentstarken, robusten und reibungslosen Betrieb durch ihren größeren Rotordurchmesser und ihre stabile Leistung aus. Berücksichtigen Sie die Umgebungsbedingungen, Kühlanforderungen und Effizienzanforderungen. Inrunner-Motoren eignen sich für Hochgeschwindigkeitswerkzeuge und Elektrofahrzeuge, während Outrunner-Motoren besser für Drohnen und Elektrofahrräder geeignet sind.