Harmonic-Getriebemotoren spielen bei humanoiden Robotern eine wichtige Rolle, da sie ein hohes Drehmoment, kompakte Abmessungen, geringes Spiel und eine präzise Bewegungssteuerung bieten. Sie finden breite Anwendung in Schulter-, Ellbogen-, Handgelenk-, Hüft-, Knie-, Knöchel-, Hüftgelenk- und Nackenmechanismen.
Bei humanoiden Robotern wirkt sich die Qualität der Gelenkbewegung direkt auf die Laufstabilität, das Gleichgewicht, die Handhabung von Objekten und die menschenähnliche Bewegung aus. Harmonic-Getriebemotoren helfen Robotern, sich sanfter, präziser und zuverlässiger zu bewegen.
Warum humanoide Roboter Präzisionsgetriebemotoren benötigen
Humanoide Roboter unterscheiden sich von einfachen Industriemaschinen. Sie müssen gehen, sich drehen, das Gleichgewicht halten, Objekte heben, mit Menschen interagieren und flexible Bewegungen ausführen. Diese Aktionen erfordern das gleichzeitige Zusammenspiel vieler Gelenke.
Wenn beispielsweise ein humanoider Roboter geht, müssen Hüfte, Knie, Knöchel, Taille und Oberkörper kontinuierlich aufeinander abgestimmt sein. Wenn ein Gelenk zu viel Spiel oder Verzögerung aufweist, kann der Roboter wackeln, das Gleichgewicht verlieren oder sich unnatürlich bewegen.
Daher muss das Gelenkmotorsystem wichtige Leistungsanforderungen erfüllen.
| Anforderung | Warum dies bei humanoiden Robotern wichtig ist |
| Hohes Drehmoment | Unterstützt das Körpergewicht, das Gehen, das Heben und die Gelenkbewegung |
| Geringes Spiel | Verbessert Bewegungsgenauigkeit und Stabilität |
| Kompakte Größe | Passt in schlanke Roboterarme, -beine und -gelenke |
| Geringes Gewicht | Reduziert die Gesamtbelastung des Roboters und den Energieverbrauch |
| Flüssige Bewegung | Macht die Bewegung natürlicher und menschenähnlicher |
| Hohe Wiederholgenauigkeit | Gewährleistet stabile Abläufe bei wiederholten Aufgaben |

Was ist ein Harmonic-Getriebemotor?
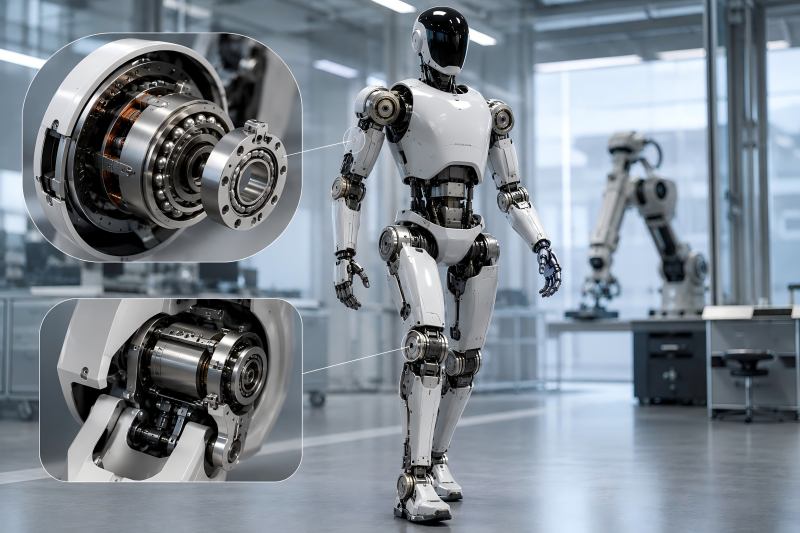
Ein Harmonic-Getriebemotor ist ein Motorsystem, das einen Harmonic-Reduzierer verwendet, um die Drehzahl zu reduzieren und das Drehmoment zu erhöhen. Der Reduzierer besteht aus einem Wellengenerator, einer Flex-Spline und einer kreisförmigen Spline.
Der Wellengenerator formt die flexible Welle zu einer Ellipse um. Während sich der Motor dreht, greift die flexible Welle in die kreisförmige Welle ein. Da die beiden Zahnräder einen geringen Zahnabstand aufweisen, wird die Abtriebsdrehzahl reduziert, während das Abtriebsdrehmoment zunimmt.
Diese Struktur ermöglicht es einem harmonischen Getriebemotor, auf sehr kleinem Raum ein hohes Untersetzungsverhältnis zu erzielen. Dies ist besonders nützlich für humanoide Roboter, bei denen der Platz an den Gelenken begrenzt ist, aber ein hohes Drehmoment benötigt wird.
Hauptfunktion von Harmonic-Getriebemotoren in humanoiden Robotern
Bereitstellung eines hohen Drehmoments in kompakten Gelenken
Gelenke humanoider Roboter müssen klein, aber leistungsstark sein. In einem Roboterarm, -bein oder -taillengelenk kann kein großes Industriegetriebe verwendet werden, da dies den Roboter sperrig und schwer machen würde.
Harmonische Getriebemotoren lösen dieses Problem durch ihre hohe Drehmomentdichte. Sie können ein starkes Ausgangsdrehmoment liefern und gleichzeitig das Gelenk kompakt halten. Dies hilft Roboterkonstrukteuren dabei, schlankere Arme, leichtere Beine und menschenähnlichere Körperproportionen zu entwickeln.
Beispielsweise benötigt das Schultergelenk genügend Drehmoment, um den Arm anzuheben. Die Hüft- und Kniegelenke benötigen sogar noch mehr Drehmoment, um das Gehen und Stehen zu unterstützen. Harmonische Getriebemotoren helfen dabei, diese Drehmomentanforderungen zu erfüllen, ohne zu viel Platz einzunehmen.
Verbesserung der Bewegungsgenauigkeit
Humanoide Roboter benötigen oft präzise Bewegungen. Wenn ein Roboter einen Gegenstand aufhebt, mit der Hand winkt, seine Haltung anpasst oder den Kopf dreht, muss das Gelenk an der richtigen Position anhalten.
Harmonische Getriebemotoren haben ein sehr geringes Spiel, was dazu beiträgt, Positionierfehler zu reduzieren. Dies ist wichtig für:
- Roboterarme
- Hände und Finger
- Halsdrehung
- Hüftbewegungen
- Gleichgewicht beim Gehen
- Objektmanipulation
Ein geringes Spiel ermöglicht es dem Roboter, sich präziser zu bewegen und dieselbe Aktion viele Male mit stabilen Ergebnissen zu wiederholen.
Unterstützung flüssiger und menschenähnlicher Bewegungen
Ein humanoider Roboter sollte sich nicht wie eine grobe Maschine bewegen. Seine Bewegungen sollten flüssig, stabil und kontrolliert sein. Harmonic-Getriebemotoren tragen dazu bei, da ihr Zahnradantrieb kontinuierlich und kompakt ist.
Flüssige Bewegungen sind wichtig für Serviceroboter, medizinische Roboter, Forschungsroboter und interaktive humanoide Roboter. Wenn sich ein Roboter natürlich bewegt, wirkt er auf Menschen sicherer und akzeptabler.
Wenn ein Roboter beispielsweise den Kopf dreht, den Arm hebt oder das Knie beugt, verbessert eine flüssige Gelenkbewegung das gesamte Benutzererlebnis.
Anwendungsbereiche in humanoiden Robotergelenken
Verschiedene Robotergelenke haben unterschiedliche Bewegungsanforderungen. Einige Gelenke benötigen ein hohes Drehmoment, während andere eine kompakte Bauweise und präzise Steuerung erfordern.
| Robotergelenkbereich | Funktion des Harmonic-Getriebemotors | Hauptvorteil |
| Schultergelenk | Steuert das Anheben und Drehen des Arms | Hohes Drehmoment und kompakte Bauweise |
| Ellbogengelenk | Unterstützt die Beugung des Arms | Flüssige und präzise Bewegung |
| Handgelenk | Ermöglicht eine flexible Handpositionierung | Geringes Spiel und hohe Präzision |
| Hüftgelenk | Unterstützt das Gehen und das Körpergleichgewicht | Hohe Belastbarkeit |
| Kniegelenk | Steuert die Beugung und Streckung des Beins | Hohe Drehmomentabgabe |
| Sprunggelenk | Unterstützt das Gleichgewicht und die Gehstabilität | Schnelle Reaktion und hohe Steuerungsgenauigkeit |
| Hüftgelenk | Ermöglicht Körperdrehungen und Haltungsanpassungen | Stabile Drehbewegung |
| Halsgelenk | Steuert die Kopfbewegung | Leichter und geräuscharmer Betrieb |
Warum Harmonic-Getriebemotoren für humanoide Roboter geeignet sind
Hohe Untersetzung
Humanoide Roboter verwenden in der Regel Hochgeschwindigkeitsmotoren, doch Robotergelenke erfordern langsamere und kraftvollere Bewegungen. Ein harmonisches Getriebe kann in einer Stufe eine hohe Untersetzung bieten und die Motordrehzahl in nutzbares Gelenkmoment umwandeln.
Dies hilft dem Roboter, sich kraftvoll und kontrolliert zu bewegen, anstatt mit unkontrollierter Geschwindigkeit.
Geringes Spiel
Spiel kann zu lockeren Gelenken, Vibrationen und ungenauer Positionierung führen. Bei humanoiden Robotern kann dies das Gleichgewicht beim Gehen, die Armsteuerung und die Handhabung von Objekten beeinträchtigen.
Harmonische Getriebemotoren sind für ihr geringes Spiel bekannt, was die Stabilität und Präzision des Roboters verbessert.
Kompaktes und leichtes Design
Der Platz in den Gelenken humanoider Roboter ist begrenzt. Harmonic-Getriebemotoren sind kompakt, wodurch sie sich leichter in Arme, Beine, Handgelenke und Knöchel integrieren lassen.
Ein leichteres Gelenk reduziert zudem die Belastung anderer Gelenke. Ist beispielsweise der Armmotor leichter, benötigt das Schultergelenk weniger Drehmoment, um den Arm anzuheben.
Hohe Drehmomentdichte
Die Drehmomentdichte gibt an, wie viel Drehmoment ein Motorsystem im Verhältnis zu seiner Größe und seinem Gewicht liefern kann. Harmonic-Getriebemotoren bieten eine hohe Drehmomentdichte, was für die Konstruktion humanoider Roboter unerlässlich ist.
Dadurch können Roboter kraftvollere Bewegungen ausführen, ohne dass überdimensionierte Aktuatoren erforderlich sind.
Harmonische Getriebemotoren im Vergleich zu anderen Lösungen für Robotergelenke
Humanoide Roboter können auch Planetengetriebemotoren, Zykloidenuntersetzungsgetriebe, Direktantriebsmotoren oder Riemenantriebssysteme verwenden. Harmonic-Getriebemotoren werden jedoch häufig gewählt, wenn Präzision und Kompaktheit im Vordergrund stehen.
| Artikel | Harmonischer Getriebemotor | Planetengetriebemotor | Direktantriebsmotor |
| Spiel | Sehr gering | Gering bis mittel | Kein Getriebespiel |
| Drehmomentdichte | Hoch | Mittel bis hoch | Geringer, sofern der Motor nicht groß ist |
| Größe | Sehr kompakt | Kompakt | In der Regel größer |
| Präzision | Hervorragend | Gut | Hervorragend |
| Untersetzungsverhältnis | Hoch in einer Stufe | Erfordert mehrere Stufen für hohe Untersetzung | Keine Untersetzung |
| Kosten | Mittel bis hoch | Mittel | Hoch bei hohem Drehmoment |
| Beste Verwendung | Präzisions-Robotergelenke | Allgemeine Automatisierungsgelenke | Hochwertige Drehmomentsteuerungsgelenke |
Wie Harmonic-Getriebemotoren das Gehen von Robotern unterstützen
Das Gehen ist eine der schwierigsten Aufgaben für humanoide Roboter. Der Roboter muss das Gleichgewicht halten, während er seine Beine bewegt, sein Gewicht verlagert und seine Körperhaltung in Echtzeit anpasst.
Harmonische Getriebemotoren unterstützen die Gehleistung auf verschiedene Weise.
Erstens liefern sie ausreichend Drehmoment für die Hüft-, Knie- und Knöchelgelenke. Diese Gelenke müssen den Roboterkörper stützen und die Beinbewegung steuern.
Zweitens trägt das geringe Spiel dazu bei, unerwünschte Gelenkbewegungen zu reduzieren. Dies verbessert das Gleichgewicht und macht das Gehen stabiler.
Drittens reduziert die kompakte Bauweise das Gewicht der Beine. Leichtere Beine benötigen weniger Energie für die Bewegung, was zur Effizienzsteigerung beiträgt.
Viertens ermöglicht die präzise Positionierung eine bessere Gangsteuerung. Der Roboter kann seinen Fuß genauer aufsetzen und seine Körperhaltung sanfter anpassen.
Wie Harmonic-Getriebemotoren Roboterarme und -hände verbessern
Roboterarme benötigen Genauigkeit und Flexibilität. Ein humanoider Roboter muss möglicherweise Gegenstände aufheben, Werkzeuge halten, Türen öffnen, Knöpfe drücken oder Hände schütteln.
Harmonische Getriebemotoren sind in Armgelenken nützlich, da sie für sanfte und präzise Bewegungen sorgen. Sie helfen dem Roboter, Schulter, Ellbogen und Handgelenk mit höherer Wiederholgenauigkeit zu steuern.
Bei Roboterhänden können kleinere harmonische Getriebemotoren oder Mikro-Präzisionsaktuatoren zur Steuerung der Fingerbewegungen eingesetzt werden. Auch wenn nicht jedes Fingergelenk mit einem harmonischen Getriebemotor ausgestattet ist, bleibt das gleiche Konstruktionsziel bestehen: kompakte Größe, präzise Steuerung und zuverlässiges Drehmoment.
Wichtige Auswahlkriterien
Bei der Auswahl von Harmonic-Getriebemotoren für humanoide Roboter müssen Ingenieure mehr als nur das Nenndrehmoment berücksichtigen. Der Motor muss zum gesamten Robotersystem passen.
Drehmoment und Belastbarkeit
Der Motor muss ausreichend Drehmoment für Bewegung, Lasthaltung, Beschleunigung und Stoßbelastungen bereitstellen. Hüft-, Knie- und Sprunggelenke erfordern in der Regel ein höheres Drehmoment als Handgelenk- oder Halsgelenke.
Gewicht und Größe
Ein kleinerer und leichterer Motor trägt dazu bei, das Gesamtgewicht des Roboters zu reduzieren. Dies ist besonders wichtig für mobile humanoide Roboter, die eine lange Betriebszeit benötigen.
Spiel und Positioniergenauigkeit
Ein geringes Spiel ist entscheidend für die Laufstabilität, die Handhabung von Objekten und die präzise Haltungskontrolle.
Wirkungsgrad und Wärmeableitung
Humanoide Roboter können im Dauerbetrieb laufen, daher kann übermäßige Motorwärme den Wirkungsgrad senken, die Lebensdauer verkürzen oder interne Bauteile beschädigen.
Lebensdauer
Die Flex-Spline im Inneren eines Harmonic-Getriebes arbeitet durch elastische Verformung. Daher müssen Ermüdungslebensdauer, Materialqualität, Schmierung und Belastungskonzeption sorgfältig berücksichtigt werden.
Häufige Herausforderungen
Obwohl Harmonic-Getriebemotoren für humanoide Roboter sehr gut geeignet sind, weisen sie auch einige Einschränkungen auf.
Eine Herausforderung sind die Kosten. Harmonic-Getriebemotoren sind in der Regel teurer als einfache Getriebemotoren. Bei Robotern mit vielen Gelenken können die Gesamtkosten für die Aktuatoren hoch sein.
Eine weitere Herausforderung ist die Stoßbelastung. Plötzliche Stöße durch Stürze, Sprünge oder schnelle Bewegungen können die Lebensdauer des Getriebes beeinträchtigen. Ingenieure müssen angemessene Drehmomentreserven und mechanische Schutzvorrichtungen einplanen.
Auch die Wärmeentwicklung ist ein wichtiger Faktor. Kompakte Robotergelenke verfügen möglicherweise nur über begrenzten Kühlraum, daher muss die thermische Auslegung von Anfang an berücksichtigt werden.