A harmonic gear motor achieves zero backlash through elastic deformation, multi-tooth engagement, and permanent preload. The wave generator reshapes the flexspline, keeping its teeth tightly meshed with the circular spline. Because the teeth remain fully engaged during rotation and load reversal, the gearbox can eliminate the clearance that causes backlash.
What Is Backlash in a Gear Motor?
Backlash is the small gap between mating gear teeth. In traditional gear systems, a certain amount of clearance is usually needed for lubrication, thermal expansion, manufacturing tolerance, and smooth rotation.
However, this clearance can cause motion error. When the motor reverses direction, the input shaft may rotate slightly before the output shaft responds. This delay is called backlash.
In precision applications, backlash can lead to:
- Positioning error
- Vibration
- Noise
- Poor repeatability
- Reduced motion control accuracy
- Unstable robot joint movement
For example, if a robot arm uses a gearbox with backlash, the arm may not stop exactly where the controller commands it to stop. This can affect assembly accuracy, gripping stability, and overall robot performance.

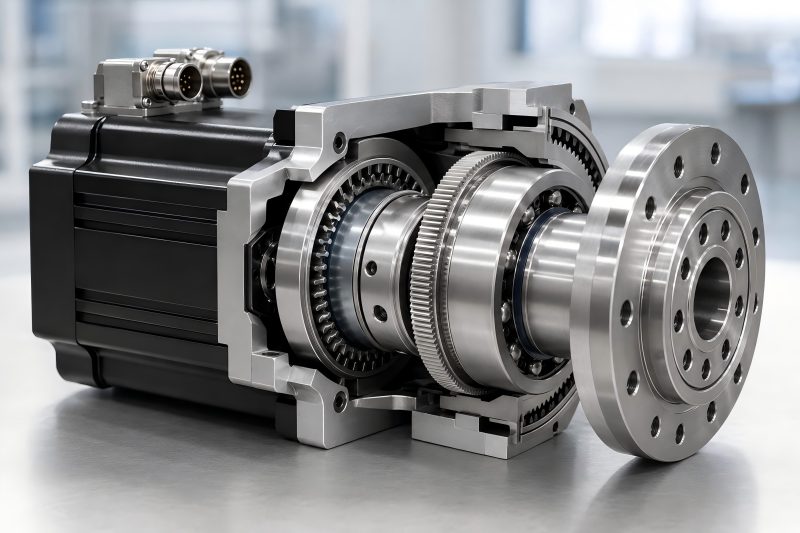
Basic Structure of a Harmonic Gear Motor
A harmonic gear motor combines an electric motor with a harmonic reducer. The harmonic reducer mainly consists of a wave generator, flexspline, and circular spline. Harmonic Drive describes strain wave gearing as a system based on the elastic mechanics of metals, using these three basic parts to achieve zero-backlash characteristics and compact structure.
| Component | Structure | Function in Zero Backlash |
| Wave Generator | Elliptical cam with bearing | Deforms the flexspline into an ellipse |
| Flexspline | Thin flexible cup with external teeth | Engages tightly with the circular spline |
| Circular Spline | Rigid ring with internal teeth | Provides fixed gear engagement |
| Motor | Servo, stepper, or BLDC motor | Provides input rotation |
| Output Flange/Shaft | Connected to flexspline or output structure | Delivers reduced speed and high torque |
The key difference from ordinary gearboxes is that one gear component is flexible. This flexibility allows the gear teeth to maintain contact without relying on loose clearance.
How the Harmonic Gear Mechanism Works
The motor drives the wave generator. The elliptical wave generator sits inside the flexspline. When it rotates, it forces the flexspline to deform into an ellipse.
The flexspline has external teeth, while the circular spline has internal teeth. The flexspline meshes with the circular spline at two opposite points of the ellipse. Harmonic Drive explains that the flexspline is slightly smaller and has fewer teeth than the circular spline, often with a difference of two teeth. As the wave generator rotates, each full rotation moves the flexspline by this tooth difference.
This enables large speed reduction in limited space. More importantly, the teeth are not loosely meshed. They are pressed into engagement by elastic deformation.
How Zero Backlash Is Achieved
Elastic Deformation Removes Tooth Clearance
In a traditional gearbox, backlash exists because the teeth need clearance. In a harmonic gear motor, the flexspline is elastically deformed by the wave generator. This deformation pushes the flexspline teeth into the circular spline teeth.
Because the flexspline is flexible, it can maintain close tooth contact during rotation. This reduces or eliminates the clearance that normally creates backlash.
In simple terms, the gearbox does not depend on loose tooth spacing. It uses controlled elastic pressure to keep the gear teeth engaged.
Multiple Teeth Engage at the Same Time
Traditional spur gears or planetary gears often transmit load through a limited number of gear teeth. A harmonic gear reducer engages many teeth across wider contact areas.
Harmonic Drive notes that the flexspline and circular spline engage across two regions along the major axis of the wave generator ellipse, not just at a single point. Continuous tooth engagement along the major axis enables zero backlash in strain wave gearheads.
This multi-tooth engagement improves load sharing, reduces local tooth clearance, and increases torsional stiffness.
Permanent Preload Keeps Teeth in Contact
Another important reason is preload. In a harmonic gear system, the flexspline is continuously pressed against the circular spline by the wave generator.
This preload maintains tight tooth contact during load reversal. Harmonic Drive SE states that due to permanent preload, Harmonic Drive gears have no backlash in the teeth, including when the load is reversed.
This is why harmonic gear motors are suitable for applications that require frequent forward and reverse movement, such as robot joints and precision positioning stages.
The Flexspline Compensates for Small Errors
Because the flexspline is elastic, it can absorb small manufacturing and assembly variations better than a completely rigid gear pair. This helps maintain smooth engagement and reduces looseness.
However, this does not mean the flexspline is weak. The flexspline is designed to be radially flexible but torsionally stiff. This means it can deform in shape while still transmitting torque accurately.
Zero Backlash vs High Torsional Stiffness
Zero backlash does not mean the gearbox has no elastic deformation at all. This is an important distinction.
Backlash refers to free mechanical clearance between gear teeth. Torsional stiffness refers to how much the output twists under load.
A harmonic gear motor can have zero backlash but still show small elastic deflection under torque. This is normal for any mechanical transmission. For high-precision systems, engineers should consider both backlash and torsional stiffness.
| Item | Meaning | Effect on Motion |
| Backlash | Free clearance between gear teeth | Causes lost motion during direction change |
| Torsional Stiffness | Resistance to twisting under load | Affects positioning under torque |
| Transmission Error | Difference between ideal and actual output position | Affects accuracy and smoothness |
| Repeatability | Ability to return to the same position | Affects precision motion stability |
For robot joints, zero backlash helps eliminate looseness, while high torsional stiffness helps the joint resist twisting under external load.
Why Zero Backlash Matters in Motion Control
Better Positioning Accuracy
In servo systems, the controller sends precise position commands. If the gearbox has backlash, the motor encoder may show movement, but the output side may not move immediately. This creates positioning error.
A harmonic gear motor reduces this problem because the output responds more directly to motor movement.
Higher Repeatability
Repeatability ensures the system returns to the same position. Zero backlash helps improve repeatability because there is less random looseness during direction changes.
This is important for:
- Robot arms
- Semiconductor wafer handling
- CNC rotary axes
- Medical imaging equipment
- Optical adjustment systems
- Inspection machines
Smoother Direction Reversal
Many precision machines require frequent direction changes. If backlash exists, each reversal can cause impact, vibration, or unstable motion.
A harmonic gear motor provides smoother reversal because the teeth remain engaged under preload.
Improved Robot Joint Stability
For robots, backlash can make joints feel loose. In humanoid robots, collaborative robots, or surgical robots, joint looseness can reduce safety and motion quality.
Harmonic gear motors help robot joints move more precisely, hold position better, and respond more naturally.
Harmonic Gear Motor vs Traditional Gear Motors
| Feature | Harmonic Gear Motor | Planetary Gear Motor | Spur Gear Motor | Worm Gear Motor |
| Backlash | Zero or near-zero | Low to medium | Medium | Medium |
| Tooth Engagement | Multiple teeth in elastic engagement | Multiple gear contacts | Limited tooth contact | Sliding contact |
| Reduction Ratio | High in one stage | Medium to high | Usually lower | Medium to high |
| Compactness | Very compact | Compact | Simple but larger for high ratio | Often bulkier |
| Precision | Excellent | Good | Moderate | Moderate |
| Best Use | Robotics, precision automation, aerospace | General automation | Simple transmission | Low-speed torque transmission |
A planetary gear motor can also provide good torque and compact size, but it usually needs very precise machining and multiple stages to reduce backlash. A harmonic gear motor achieves low or zero backlash mainly through its elastic strain wave structure.
Main Benefits of Zero Backlash Harmonic Gear Motors
High Accuracy
Zero backlash allows the motor output to follow the input command more accurately. This is useful for machines that require precise angular positioning.
Compact Design
Harmonic gear motors can achieve high reduction ratios in one stage. Harmonic Drive SE states that strain wave gears can achieve reduction ratios of 30:1 to 160:1 with only three components, while customer-specific solutions can reach higher ratios.
High Torque Density
Because many teeth share the load, harmonic gear motors can transmit high torque in a compact body. That’s why they suit robot joints and compact automation modules.
Smooth Motion
Continuous tooth engagement helps reduce vibration and improves motion smoothness. This is valuable for applications that require quiet operation and stable movement.
Application Areas
Harmonic gear motors are widely used in precision industries where backlash control is critical.
| Application | Why Zero Backlash Matters |
| Humanoid Robots | Improves joint stability, walking balance, and motion accuracy |
| Industrial Robot Arms | Supports accurate positioning and repeatable movement |
| Semiconductor Equipment | Enables precise wafer handling and inspection motion |
| Medical Devices | Provides smooth, controlled, and accurate movement |
| Aerospace Systems | Supports compact and reliable precision mechanisms |
| Optical Instruments | Helps achieve fine angular adjustment |
| CNC Rotary Tables | Improves indexing accuracy and machining quality |
Common Misunderstandings About Zero Backlash
Zero Backlash Does Not Mean Zero Error
A harmonic gear motor can eliminate tooth clearance, but other errors may still exist. These may include encoder error, control tuning error, bearing deformation, shaft misalignment, and load-related elastic deflection.
Zero Backlash Does Not Mean Unlimited Load Capacity
If the gear motor is overloaded, accuracy and service life can still be affected. Correct torque selection is important.
Zero Backlash Requires Proper Installation
Even a high-quality harmonic gear motor may perform poorly if the mounting surface is uneven, the shaft is misaligned, or the load is not properly supported.
How to Select a Zero Backlash Harmonic Gear Motor
When choosing a harmonic gear motor, buyers should not only ask whether it has zero backlash. They should also evaluate the full motion system.
Important selection factors include:
- Rated torque
- Peak torque
- Reduction ratio
- Torsional stiffness
- Positioning accuracy
- Repeatability
- Output bearing capacity
- Motor type
- Encoder resolution
- Duty cycle
- Installation space
- Service life requirement
For high-end applications, it is also important to check load inertia, acceleration, shock load, thermal performance, and lubrication conditions.
