Os motores elétricos impulsionam a automação moderna, alimentando aplicações que vão desde a robótica e os transportadores até aos drones e aos veículos elétricos. No entanto, os motores não podem funcionar isoladamente — necessitam de componentes eletrónicos precisos para controlar o seu desempenho. É aqui que entram em jogo os drivers e os controladores de motor.
Embora frequentemente utilizados de forma intercambiável, estes dois componentes desempenham funções distintas, mas complementares, no funcionamento do motor. Como fabricante de sistemas de motores, compreender as diferenças entre os controladores de motor e os reguladores de motor é fundamental para um projeto adequado do sistema, a otimização de custos e o desempenho específico para cada aplicação.

O que é o controlo de motores?
Antes de nos debruçarmos sobre as distinções, é importante compreender o conceito mais amplo de controlo de motores. Os motores requerem sinais elétricos regulados para funcionar às velocidades, binários e direções desejados. Estes sinais têm de ser ajustados dinamicamente com base no feedback, nas condições de carga ou na lógica programada.
Este processo de controlo é alcançado através de:
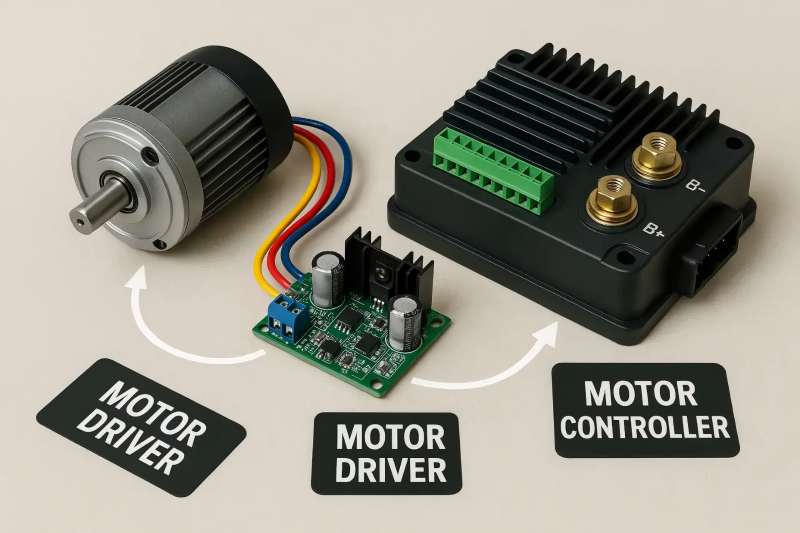
- Controladores de motor – o cérebro da operação
- Drivers de motor – o músculo que executa as instruções
Ambos são essenciais nos sistemas eletromecânicos.

O que é um controlador de motor?
Um driver de motor é um componente de hardware que fornece potência ao motor de acordo com os sinais de controlo que recebe. A sua principal função é amplificar sinais de baixa potência e traduzi-los em saídas de alta corrente que acionam o motor.
Funções principais:
- Amplificação de tensão e corrente
- Comutação de direção (por exemplo, ponte H para motores de corrente contínua)
- Controlo de comutação para motores de passo ou sem escovas
- Proteção térmica ou monitorização de falhas (em controladores avançados)
Orientados para o hardware
Os controladores de motor são, essencialmente, componentes de circuitos eletrónicos que fazem a ponte entre sinais de nível lógico e as fases de motores de alta potência.
O que é um controlador de motor?
Um controlador de motor é um sistema eletrónico (hardware + software) que gere a lógica, a tomada de decisões e os algoritmos de controlo que regem o comportamento do motor. Processa as entradas do utilizador, os dados dos sensores e o feedback em tempo real para produzir sinais de controlo para o controlador.
Funções principais:
- Planeamento do movimento (velocidade, direção, aceleração)
- Processamento de feedback (através de encoders e sensores)
- Controlo em circuito fechado (PID, FOC)
- Comunicação com sistemas anfitriões (por exemplo, PLC, MCU, PC)
- Funções de segurança e diagnóstico
Orientados para o software
Os controladores são mais inteligentes do que os drivers. Contêm microcontroladores, firmware ou lógica digital para ajustar dinamicamente o desempenho do motor.
Principais diferenças entre controladores de motor e drivers
| Característica | Controlador de motor | Controlador de motor |
| Função | Fornecimento de potência e comutação | Geração de comandos e lógica do sistema |
| Complexidade | Circuitos simples | Sistema de software + hardware |
| Integração de retroalimentação | Mínima ou nula | Essencial (por exemplo, codificador, corrente) |
| Ajustabilidade | Fixo ou limitado | Altamente programável |
| Controlo de posição/velocidade | Não suportado | Funcionalidade principal |
| Nível de inteligência | Baixo (reativo) | Elevado (adaptativo e preditivo) |
| Protocolos de comunicação | Raros (a menos que integrados) | Comuns (CAN, UART, Modbus, etc.) |
Como os controladores e os drivers de motor funcionam em conjunto
Um sistema típico de controlo de motores funciona da seguinte forma:
- Sinal de entrada: Um sistema anfitrião ou o utilizador define os requisitos de movimento.
- Controlador do motor: Calcula algoritmos de controlo (por exemplo, PID, FOC) e gera sinais de baixa tensão.
- Controlador de motor: Converte os sinais do controlador em formas de onda de alta corrente.
- Motor: Executa o comando — move-se em conformidade.
- Circuito de retroalimentação: Os sensores enviam informações ao controlador para o ajuste fino.
Exemplo:
Para um motor BLDC:
- O controlador executa o Controlo Orientado para o Campo (FOC)
- O controlador de motor emite impulsos trifásicos
- O codificador comunica a posição do rotor
- O controlador ajusta o sinal PWM em conformidade
Tipos de controladores de motor
| Tipo de controlador | Descrição | Motores típicos |
| Controladores de malha aberta | Sem retroalimentação, controlo simples | Motores de passo |
| Controladores de circuito fechado | Utilizam feedback para ajuste dinâmico | Servo, BLDC, PMSM |
| Controladores incorporados | Firmware e microprocessadores integrados | Módulos integrados |
| Controladores externos | Unidade lógica separada, controla vários motores | Variadores industriais |
Tipos de controladores de motor
| Tipo de controlador | Descrição | Motores de destino |
| Controladores de ponte H | Permitem corrente bidirecional para motores de corrente contínua | Motores de corrente contínua com escovas |
| Meia-ponte | Aciona numa direção por fase | BLDC, de passo |
| Ponte completa | Alimenta ambos os lados de cada bobina do motor | BLDC, motores trifásicos |
| Controladores de porta | Controlam os MOSFETs ou IGBTs de potência | Sistemas de alta tensão |
| Controladores inteligentes | Combinam alguma lógica de controlo (por exemplo, limitação de corrente) | Servomotores |
Comparação entre controlador de motor e driver de motor
| Aspecto | Controlador de motor | Controlador de motor |
| Função | Converte sinais em potência para o motor | Gera e ajusta sinais de controlo |
| Componentes principais | MOSFETs, BJTs, circuitos de ponte em H | Microcontroladores, DSPs, firmware |
| Nível de controlo | Baixo nível, apenas hardware | Nível elevado, lógica e retroalimentação |
| Entrada de sinal | PWM, lógica ALTO/BAIXO | Comandos seriais, E/S, sensores |
| Saída de sinal | Correntes das bobinas do motor | Sinais de controlo do controlador |
| Capacidade de comunicação | Mínima | Pilha de protocolos completa (CAN, SPI, RS485) |
| Complexidade de integração | Baixa | Moderada a elevada |
| Custo | Mais baixo | Mais elevado devido à inteligência |
Casos de utilização baseados em aplicações
Caso 1: Pequeno robô de passatempo (motor CC com escovas)
- Controlador do motor: Ponte H L298N
- Controlador do motor: Arduino UNO com código PID
- Função: O Arduino envia PWM para o L298N → O L298N aciona o motor
Caso 2: Sistema servo industrial
- Motor: Servomotor CA com codificador
- Controlador: Controlador de servo dedicado (por exemplo, Siemens, Delta)
- Driver: Inversor de alta potência com proteção térmica
- Função: O controlador calcula o binário e a velocidade → O driver fornece a corrente de fase
Caso 3: Drone (motor BLDC)
- Controlador de velocidade: ESC (Controlador Eletrónico de Velocidade, funciona como controlador)
- Controlador: Controlador de voo (por exemplo, Pixhawk)
- Integração: Controlo em tempo real das hélices com feedback do giroscópio
Perspetiva do fabricante sobre integração e conceção
Como fabricante de sistemas de motores, deve ter em conta:
- Solução personalizada vs. solução pronta a usar: se deve conceber um controlador proprietário ou utilizar circuitos integrados disponíveis no mercado, como o DRV8880 ou o TMC2209.
- Módulos integrados: Tendência crescente para integrar o controlador de potência e o controlador de voo numa única unidade, para poupar espaço e aumentar a fiabilidade.
- Concepção térmica: Os controladores de potência requerem dissipadores de calor, placas de circuito impresso (PCB) ou pacotes MOSFET adequados.
- Desenvolvimento de firmware: Os controladores de motor personalizados requerem frequentemente meses de afinação, conceção de algoritmos e testes de conformidade.
Exemplo: Um servoacionamento integrado inclui tanto o controlador como o controlador de potência num único invólucro, ideal para AGVs e sistemas CNC.
Considerações-chave para a seleção de controladores de potência e controladores
| Critérios | Questões a colocar |
| Tipo de motor | Com escovas, BLDC, de passo, PMSM? |
| Valores nominais de tensão e corrente | Quais são as necessidades de potência do seu motor? |
| Requisitos de controlo | Precisa de controlo de velocidade, binário ou posição? |
| Tipo de feedback | Codificador, sensor Hall ou sem sensor? |
| Protocolo de comunicação | É necessária uma interface CANopen, Modbus ou USB? |
| Espaço e formato | Unidades integradas ou separadas? |
| Restrições de custo | O que é mais importante: o orçamento ou o desempenho? |
| Segurança e proteção | São necessárias funcionalidades como OVP, OTP ou deteção de bloqueio? |
Embora os drivers de motor e os controladores de motor sejam por vezes confundidos, desempenham funções muito diferentes num sistema eletromecânico. Os drivers concentram-se no fornecimento de potência, atuando como amplificadores de sinal, enquanto os controladores são responsáveis pelo controlo inteligente, pela geração de sinais e pelo processamento de feedback.
Na prática, trabalham em conjunto — um a comandar, o outro a executar. Como fabricante, a escolha da combinação certa depende da complexidade da sua aplicação, dos requisitos de desempenho, das restrições de custo e das necessidades de integração.
Compreender esta distinção ajuda os engenheiros a conceber sistemas de controlo de movimento mais robustos, eficientes e económicos — seja para automação industrial, robótica, veículos elétricos ou dispositivos domésticos inteligentes.
Precisa de ajuda para selecionar ou conceber a solução ideal de controlo de motores para o seu produto? Como fabricante de confiança de sistemas de motores, oferecemos controladores de motores personalizados, soluções integradas de drivers e consultoria técnica adaptada às suas especificações exatas.
Indique-nos o seu tipo de motor, aplicação e objetivos de desempenho — e nós ajudá-lo-emos a construí-lo da forma correta.
