드론에 적합한 무브러시 모터를 선택하기 위한 자세한 가이드
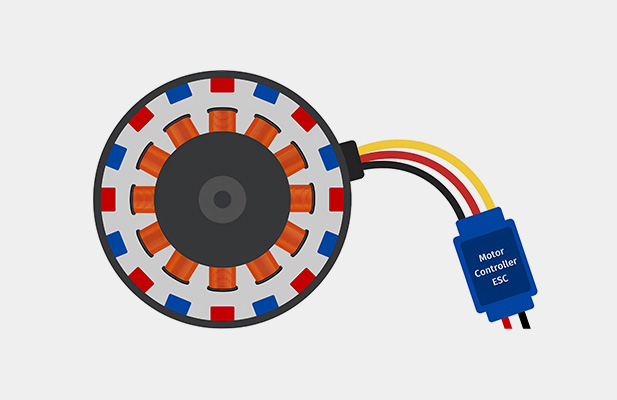
드론을 설계하거나 업그레이드할 때 올바른 무브러시 모터를 선택하는 것은 중요한 결정입니다. 전기 에너지에서 변환된 기계적 에너지로 프로펠러에 동력을 공급하는 모터는 드론의 두뇌입니다. 이상적인 무브러시 모터를 선택하면 드론의 성능, 효율성 및 전반적인 비행 경험에 큰 영향을 미칠 수 있습니다. 무브러시 모터 선택을 위한 주요 고려 사항 드론에 적합한 무브러시 모터를 선택하는 것은 속도, 안정성, 내구성과 같은 전반적인 비행 특성에 영향을 미치는 여러 요인에 따라 달라집니다. 가장 중요한 고려 사항을 분석해 보겠습니다. KV 정격: 모터 속도 이해 KV 정격은 모든 무브러시 모터에 가장 중요한 사양 중 하나입니다. 이는 인가된 볼트당 모터의 RPM(분당 회전 수)을 나타냅니다. 예를 들어, 1볼트를 수신하는 모터는 2300RPM으로 회전하고 KV 정격은 2300KV입니다. 높은 KV 모터: 높은 KV 정격(예: 2300KV~2700KV)의 모터는 더 빠르게 회전하며 속도와 민첩성이 우선시되는 레이싱 드론이나 FPV(First Person View) 드론에 이상적입니다. 그러나 이러한 모터는 토크가 덜 생성되는 경향이 있어 더 큰 프로펠러를 사용하면 효율이 떨어질 수 있습니다. 낮은 KV 모터: 낮은 KV 정격(예: 800KV~1400KV)의 모터는 더 느리게 회전하지만 토크가 더 큽니다. 안정성과 효율성이 필요한 대형 드론이나 항공 사진 플랫폼에 더 적합하며, 특히 더 큰 프로펠러를 사용할 때 더욱 그렇습니다. 모터 모델 직경 (mm) 길이 (mm) 축 직경 (mm) 무게 (g) 출력 (W) 전압 (V) BLDC-2015 20 15 2 35 25 12 BLDC-2830 28 30 3 65 40 24 BLDC-3548 35 48 5 150 120 36 BLDC-4250 42 50 5 220 200 48 BLDC-5055 50 55 6 330 350 48 BLDC-6374 63 74 8 820 500 60 BLDC-80100 80 100 10 1250 1200 72 모터 크기 및 무게 무브러시 모터는 다양한 크기로 제공되며 일반적으로 두 개의 숫자(예: 2205, 2306, 2812)로 표시됩니다. 밀리미터 단위의 고정자 높이는 두 번째 숫자로 표시되고 밀리미터 단위의 고정자 직경은 첫 번째 숫자로 표시됩니다. 예를 들어 “2205”라는 라벨이 붙은 모터는 직경이 22mm이고 높이가 5mm인 고정자를 갖습니다. 소형 모터(예: 1806, 2204): 이 모터는 가볍고 컴팩트하여 무게가 주요 관심사인 소형 드론이나 마이크로 쿼드콥터에 이상적입니다. 고속 기동 FPV 레이싱 드론에서 자주 사용됩니다. 대형 모터(예: 2212, 2814): 대형 모터는 더 무겁고 토크가 더 크며, 이는 항공 사진 드론의 카메라나 짐벌과 같은 더 무거운 탑재물을 운반하는 데 필수적입니다. 이 모터는 또한 더 큰 프로펠러로 더 효율적입니다. 추력 및 전력 요구 사항 추력은 모터가 드론을 공중으로 들어올리기 위해 생성하는 힘의 양입니다. 드론이 얼마나 많은 무게를 실을 수 있고 얼마나 빨리 가속할 수 있는지를 결정하는 데 중요한 요소입니다. 무브러시 모터는 일반적으로 특정 프로펠러와 전압과 함께 사용할 때 생성할 수 있는 최대 힘을 나타내는 추력 정격을 갖습니다. 추력 대 중량 비율: 2:1 추력 대 중량 비율은 종종 합리적인 목표입니다. 즉, 드론의 모터는 드론의 총 중량(프레임, 배터리, 탑재량 포함)의 두 배의 추력을 생성해야 합니다. 예를 들어, 드론의 무게가 1kg인 경우 모든 모터의 총 추력은 2kg이 되어야 합니다. 이렇게 하면 호버링, 등반 및 기동에 충분한 전력이 보장됩니다. 전력 출력: 와트로 측정되며 전압에 전류를 곱하여 계산합니다. 드론에 필요한 모터 전력을 계산하려면 다음 공식을 사용할 수 있습니다. Power (W) = Voltage (V) x Current (A) 선택한 모터가 과열되거나 배터리에서 너무 많은 전류를 소모하지 않으면서도 드론의 전력 요구 사항을 처리할 수 있는지 확인하세요. 전압 및 배터리 호환성 모터에 공급되는 전압은 또 다른 중요한 요소입니다. 무브러시 모터는 사용하는 배터리 유형에 따라 결정되는 특정 전압 범위에서 작동하도록 설계되었습니다. 대부분의 드론 배터리는 LiPo(리튬 폴리머)이며 다양한 셀 수(예: 3S, 4S, 6S)로 제공되며 각 셀은 약 3.7볼트를 공급합니다. 3S 배터리(11.1V): 일반적으로 전력이 덜 필요한 소형 모터 및 드론과 함께 사용됩니다. 더 높은 KV 모터는 3S 배터리와 함께 자주 사용됩니다. 4S 배터리(14.8V) 및 6S 배터리(22.2V): 레이싱 또는 중량물 운반 드론과 같은 고성능 드론을 위한 더 강력한 모터와 함께 사용됩니다. KV 정격이 낮은 모터는 일반적으로 더 높은 전압 배터리와 페어링되어 과열 없이 원하는 RPM을 달성합니다. 드론의 배터리와 모터가 호환되는지 확인하세요. 모터나 다른 부품이 손상되는 것을 방지하세요. 프로펠러 크기 및 모터 매칭 프로펠러는 모터 설정의 중요한 부분으로, 모터가 전기 에너지를 추력으로 얼마나 효과적으로 변환할 수 있는지 결정합니다. 최적의 성능을 위해 프로펠러 크기와 피치는 모터의 KV 정격 및 출력과 일치해야 합니다. 작은 프로펠러(예: 4~5인치): 작은 프로펠러는 고속 비행을 위해 높은 KV 모터(예: 2300KV 이상)와 페어링되며, 일반적으로 레이싱 드론에 사용됩니다. 추력은 낮지만 가속이 빠르고 기동성이 더 좋습니다. 큰 프로펠러(예: 6~10인치): 큰 프로펠러는 안정성과 효율적인 비행을 위해 낮은 KV 모터(예: 800KV~1400KV)와 페어링되며, 특히 탑재물을 운반할 때 유용합니다. 더 큰 프로펠러에서 생성되는 더 큰 전력으로 드론이 더 효과적으로 호버링하고 더 큰 하중을 운반할 수 있습니다. 또 다른 요인은 프로펠러의 피치인데, 피치가 클수록 항력은 증가하는 대신 앞으로 더 많이 밀어냅니다. 모터를 다른 드론 구성 요소에 맞추기 올바른 무브러시 모터를 선택할 때는 ESC, 배터리, 프레임과 같은 다른 중요한 드론 구성 요소와의 호환성을 보장하는 것이 필수적입니다. ESC(전자 속도 컨트롤러) 호환성 ESC는 모터에 적절한 양의 전력을 공급하는 역할을 합니다. 각 모터에는 적절한 전류 정격의 ESC가 필요합니다. 예를 들어, 모터가 부하 상태에서 최대 20암페어를 소모하는 경우 안전하고 안정적인 작동을 보장하기 위해 최소 25암페어 정격의 ESC를 선택해야 합니다. 전류 정격 외에도 ESC는 사용 중인 배터리 유형(3S, 4S 등)을 지원해야 하며 드론의 비행 컨트롤러와 호환되어야 합니다. ESC에 대해 자세히 알아보려면 이 문서를 읽어보세요. 전자 속도 컨트롤러(ESC) 문제 해결 배터리 용량 및 C-등급 드론이 비행할 수 있는 시간은 배터리 용량에 따라 결정되며, 이는 mAh(밀리암페어-시간)로 표현됩니다. 일반적으로 더 큰 모터는 더 많은 전력을 소모하므로 더 긴 비행 시간을 유지하려면 더 높은 용량의 배터리가 필요합니다. 배터리의 C 정격도 중요한데, 이는 배터리가 얼마나 빨리 전력을 방전할 수 있는지를 나타내기 때문입니다. 배터리가 과열되지 않고 모터의 요구 사항을 충족할 수 있는 충분한 전류를 공급할 수 있는지 확인하십시오. 프레임 크기 및 모터 장착 드론 프레임의 크기는 사용할 수 있는 최대 모터 크기와 프로펠러 직경을 결정합니다. 대부분의 드론 프레임에는 특정 모터 크기(예: 2204 또는 2212)에 맞게 설계된 사전 정의된 모터 장착 구멍이 있습니다. 선택한 모터가 프레임의 장착 패턴과 호환되고 적절한 프로펠러 크기를 수용할 수 있는지 확인하세요. 무브러시 모터를 선택할 때 피해야 할 일반적인 오류 드론에 무브러시 DC 모터를 선택할 때 성능 저하, 과열 또는 드론 손상으로 이어질 수 있는 실수를 하기 쉽습니다. 피해야 할 몇 가지 일반적인 실수는 다음과 같습니다. 잘못된 KV 정격 선택: 높은 KV 모터가 반드시 최선의 선택은 아닙니다. 항공 사진용 드론을 만드는 경우 안정성과 낮은 RPM이 필요하므로 낮은 KV 모터를 선택하세요. 반면, 레이싱 드론을 만드는 경우 높은 KV 모터가 필요한 속도와 반응성을 제공합니다. 모터와 프로펠러의 불일치: 모터에 비해 너무 큰 프로펠러를 사용하면 과도한 전류 소모가 발생하여 과열되고 효율성이 떨어질 수 있습니다. 항상 모터에 대한 제조업체의 권장 프로펠러 크기를 확인하세요. 무게 무시: 무거운 모터는 토크를 더 많이 제공할 수 있지만 드론의 총