Les servomoteurs sont des éléments essentiels de nombreuses applications, notamment l’automatisation, la robotique, les machines CNC et la fabrication. Pour garantir des performances optimales, une rentabilité et une efficacité énergétique optimales, il est essentiel de sélectionner la taille de servomoteur appropriée. Ce guide fournit un aperçu approfondi des tailles de servomoteurs, de leurs spécifications et de la manière de sélectionner celui qui convient à votre application.
Qu’est-ce qu’un servomoteur ?
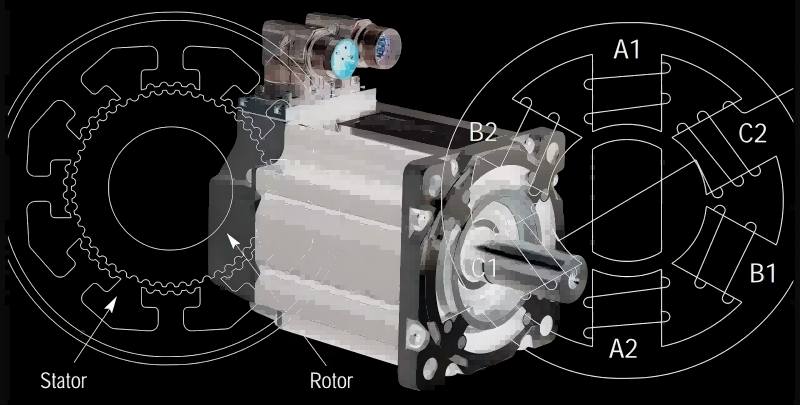
Un servomoteur est un type d’actionneur linéaire ou rotatif qui permet un contrôle précis de l’accélération, de la vitesse et de la position angulaire. Un moteur et un capteur de rétroaction sont couplés pour un contrôle en boucle fermée. Les industries nécessitant un positionnement précis et un contrôle de la vitesse font largement appel aux servomoteurs.
Caractéristiques principales :
- Haute précision
- Temps de réponse rapide
- Conception compacte
- Couple et vitesse personnalisables
Pourquoi les tailles de servomoteurs sont-elles importantes ?
La taille d’un servomoteur a un impact sur son couple, sa vitesse et sa capacité à fonctionner sous charge. Le choix d’un moteur mal dimensionné peut entraîner :
- Sous-dimensionnement : couple insuffisant, surchauffe et durée de vie réduite.
- Surdimensionnement : coût inutile, besoins en espace plus importants et inefficacité.
Pour garantir des performances optimales, il est essentiel de comprendre les classifications de taille des moteurs et leurs spécifications.
Classification des servomoteurs par taille
Les servomoteurs sont disponibles dans une variété de tailles, allant des moteurs miniatures pour les petits appareils électroniques aux gros moteurs utilisés dans les machines industrielles. Le dimensionnement d’un servomoteur dépend de plusieurs facteurs, notamment :
- Exigences de couple : la quantité de couple nécessaire pour déplacer ou maintenir une charge.
- Exigences de vitesse : la vitesse à laquelle le moteur doit fonctionner.
- Inertie de charge : la résistance de la charge aux changements de mouvement.
- Type d’application : si le moteur sera utilisé pour le positionnement, le mouvement continu ou les deux.
Facteurs clés du dimensionnement des servomoteurs
Il est essentiel de comprendre votre application et les capacités du moteur pour dimensionner correctement le servomoteur. Les principales considérations sont les suivantes :
Couple
Les servomoteurs sont évalués en fonction de leur couple de sortie, qui est généralement exprimé en Newton-mètres (Nm) ou en onces-pouces (oz-in). Le couple nécessaire à votre application détermine la taille du moteur.
- Couple continu : le couple qu’un moteur peut fournir en continu sans surchauffer.
- Couple de pointe : le couple le plus élevé qu’un moteur peut produire pendant de brèves périodes.
Vitesse
La vitesse du moteur est généralement mesurée en tours par minute (RPM). Les applications nécessitant des mouvements à grande vitesse peuvent nécessiter des moteurs plus petits et plus légers avec des capacités de RPM plus élevées.
Puissance
Le produit du couple et de la vitesse angulaire est utilisé pour calculer la puissance. Pour les applications nécessitant une puissance plus élevée, des servomoteurs plus gros peuvent être nécessaires.
Dimensions physiques
Les servomoteurs sont disponibles dans différentes tailles physiques, souvent déterminées par la taille du châssis. Les tailles de châssis courantes sont basées sur des normes industrielles, telles que les tailles NEMA (National Electrical Manufacturers Association).
Tailles courantes des servomoteurs
Voici une répartition des tailles courantes des servomoteurs et de leurs applications typiques :
| Taille du moteur servo | Plage de couple | Plage de vitesse | Applications typiques |
| Micro | < 0,1 Nm | 1000–5000 RPM | Petits robots, drones, projets de loisirs |
| Petit | 0,1–1 Nm | 1000–6000 RPM | Appareils médicaux, imprimantes 3D, machines CNC |
| Moyen | 1–10 Nm | 500–3000 RPM | Robots industriels, machines d’emballage |
| Grand | > 10 Nm | 100–1500 RPM | Machines lourdes, systèmes de convoyeurs |
Couple et vitesse : comprendre le compromis
Les servomoteurs fonctionnent dans un compromis entre couple et vitesse. Plus un moteur tourne vite, moins il peut fournir de couple. À l’inverse, les moteurs à couple élevé ont souvent des vitesses maximales inférieures. Cette relation est généralement représentée sur une courbe couple-vitesse.
Exemple de courbe couple-vitesse
Vous trouverez ci-dessous une représentation générale d’une courbe couple-vitesse pour un servomoteur :
- Région 1 : Couple continu à faible vitesse.
- Région 2 : Couple maximal pendant de brèves durées.
- Région 3 : Couple réduit à grande vitesse.
| Vitesse (tr/min) | Couple (Nm) |
| 500 | 10 |
| 1000 | 8 |
| 2000 | 6 |
| 3000 | 4 |
| 4000 | 2 |
Exemple de dimensionnement : Sélection d’un servomoteur pour une machine CNC
Imaginez que vous conceviez une machine CNC qui nécessite les éléments suivants :
- Inertie de charge : 0,02 kg·m²
- Vitesse : 1 500 tr/min
- Couple continu : 3 Nm
- Couple maximal : 6 Nm
À l’aide de ces paramètres, vous :
- Sélectionnez la plage de vitesse : Choisissez un moteur capable d’atteindre au moins 1 500 tr/min.
- Vérifiez les exigences de couple : recherchez un moteur fournissant un couple continu de 3 Nm et un couple de pointe de 6 Nm.
- Faites correspondre l’inertie : assurez-vous que l’inertie du moteur correspond ou est légèrement supérieure à l’inertie de charge pour la stabilité.
Pour cet exemple, un servomoteur de taille moyenne serait probablement approprié.
Tableau de dimensionnement des servomoteurs NEMA
Pour simplifier le processus de sélection, voici un tableau général indiquant les tailles de servomoteurs typiques et leurs spécifications :
| Taille du cadre | Couple continu (Nm) | Couple de crête (Nm) | Vitesse (RPM) | Applications |
| NEMA 17 | 0,2–0,5 | 0,5–1,0 | 3000–5000 | Petits robots, imprimantes 3D |
| NEMA 23 | 0,5–2,0 | 2,0–4,0 | 1000–3000 | Machines CNC, emballage |
| NEMA 34 | 2,0–8,0 | 8,0–16,0 | 500–1500 | Automatisation industrielle, robots |
| Grand personnalisé | > 8,0 | > 16,0 | 100–500 | Convoyeurs, levage lourd |
Étapes pour choisir la bonne taille de servomoteur
- Définissez les exigences de l’application : déterminez le couple, la vitesse et l’inertie de charge.
- Examinez les spécifications du moteur : comparez les spécifications des moteurs disponibles avec vos exigences.
- Tenez compte des contraintes physiques : pour vous assurer que le moteur fonctionnera avec votre machine, vérifiez ses dimensions physiques.
- Exécutez des simulations : utilisez des outils ou des logiciels de simulation pour vérifier les performances du moteur dans les conditions de fonctionnement prévues.
- Évaluez les facteurs environnementaux : tenez compte de la dissipation thermique, des vibrations et des exigences de montage.
Avantages d’un dimensionnement approprié du servomoteur
- Efficacité : évite le gaspillage d’énergie et la surchauffe.
- Rentabilité : réduit les coûts initiaux et opérationnels.
- Fiabilité : assure un fonctionnement à long terme sans panne.
- Performance : offre un contrôle et une précision précis.
Tendances futures en matière de conception de servomoteurs
À mesure que la technologie évolue, les servomoteurs deviennent plus petits, plus puissants et économes en énergie. Les principales tendances incluent :
- Miniaturisation : micro-servomoteurs avec un couple plus élevé pour les applications compactes.
- Intégration : contrôleurs intégrés pour une fonctionnalité plug-and-play.
- Efficacité énergétique : conceptions améliorées réduisant la consommation d’énergie.
Conclusion
Le choix de la bonne taille de servomoteur est une étape essentielle dans la conception d’un système efficace et rentable. Comprendre la relation entre la taille, le couple et les exigences de l’application garantit des performances optimales. En prenant en compte des facteurs tels que les exigences de charge, les conditions environnementales et la compatibilité du système, et en consultant un fabricant de servomoteurs de confiance, vous pouvez sélectionner un servomoteur qui répond à vos besoins spécifiques.