Un motoréducteur harmonique élimine le jeu grâce à la déformation élastique, à l’engrènement de plusieurs dents et à une précharge permanente. Le générateur d’ondes remodèle la cannelure flexible, maintenant ses dents en prise étroite avec la cannelure circulaire. Comme les dents restent en prise totale pendant la rotation et l’inversion de charge, le réducteur peut éliminer le jeu qui provoque le jeu de roulement.
Qu’est-ce que le jeu dans un motoréducteur ?
Le jeu est le petit espace entre les dents des engrenages en prise. Dans les systèmes d’engrenages traditionnels, un certain jeu est généralement nécessaire pour la lubrification, la dilatation thermique, les tolérances de fabrication et une rotation en douceur.
Cependant, ce jeu peut entraîner une erreur de mouvement. Lorsque le moteur inverse son sens de rotation, l’arbre d’entrée peut tourner légèrement avant que l’arbre de sortie ne réagisse. Ce décalage est appelé jeu.
Dans les applications de précision, le jeu peut entraîner :
- Une erreur de positionnement
- Des vibrations
- Du bruit
- Une mauvaise répétabilité
- Une précision de contrôle du mouvement réduite
- Mouvement instable des articulations du robot
Par exemple, si un bras de robot utilise un réducteur présentant un jeu, il se peut que le bras ne s’arrête pas exactement à l’endroit où le contrôleur lui ordonne de s’arrêter. Cela peut affecter la précision de l’assemblage, la stabilité de la préhension et les performances globales du robot.

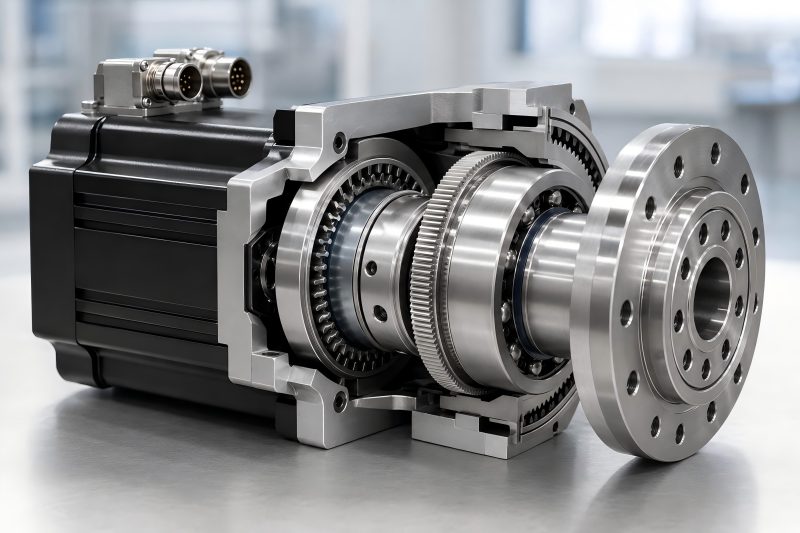
Structure de base d’un moteur à engrenages harmoniques
Un moteur à engrenages harmoniques combine un moteur électrique et un réducteur harmonique. Le réducteur harmonique se compose principalement d’un générateur d’ondes, d’une cannelure flexible et d’une cannelure circulaire. Harmonic Drive décrit l’engrenage à ondes de déformation comme un système basé sur la mécanique élastique des métaux, utilisant ces trois éléments de base pour obtenir des caractéristiques sans jeu et une structure compacte.
| Composant | Structure | Fonction dans le jeu nul |
| Générateur d’ondes | Came elliptique avec roulement | Déforme la flexspline en une ellipse |
| Flexspline | Coupelle fine et flexible à denture externe | S’engage fermement avec la cannelure circulaire |
| Canelure circulaire | Bague rigide à denture interne | Assure un engagement fixe de l’engrenage |
| Moteur | Servomoteur, moteur pas à pas ou moteur BLDC | Assure la rotation d’entrée |
| Bride/arbre de sortie | Raccordé à une couronne dentée flexible ou à une structure de sortie | Fournit une vitesse réduite et un couple élevé |
La principale différence par rapport aux réducteurs classiques réside dans le fait qu’un des composants de l’engrenage est flexible. Cette flexibilité permet aux dents de l’engrenage de rester en contact sans avoir recours à un jeu.
Fonctionnement du mécanisme à engrenage harmonique
Le moteur entraîne le générateur d’ondes. Le générateur d’ondes elliptique est logé à l’intérieur de la flexspline. Lorsqu’il tourne, il force la flexspline à se déformer en une ellipse.
La flexspline possède des dents externes, tandis que la cannelure circulaire possède des dents internes. La flexspline s’engrène avec la cannelure circulaire en deux points opposés de l’ellipse. Harmonic Drive explique que la flexspline est légèrement plus petite et comporte moins de dents que la spline circulaire, souvent avec une différence de deux dents. À mesure que le générateur d’ondes tourne, chaque rotation complète déplace la flexspline de cette différence de dents.
Cela permet une forte réduction de vitesse dans un espace restreint. Plus important encore, les dents ne s’engrènent pas de manière lâche. Elles sont mises en prise par déformation élastique.
Comment obtenir un jeu nul
La déformation élastique élimine le jeu entre les dents
Dans un réducteur traditionnel, le jeu existe car les dents ont besoin d’un jeu. Dans un motoréducteur harmonique, la flexspline est déformée élastiquement par le générateur d’ondes. Cette déformation enfonce les dents de la flexspline dans celles de la cannelure circulaire.
Comme la flexspline est flexible, elle peut maintenir un contact étroit entre les dents pendant la rotation. Cela réduit ou élimine le jeu qui crée normalement un jeu.
En termes simples, le réducteur ne dépend pas d’un espacement lâche entre les dents. Il utilise une pression élastique contrôlée pour maintenir les dents des engrenages en prise.
Engagement simultané de plusieurs dents
Les engrenages droits ou planétaires traditionnels transmettent souvent la charge par l’intermédiaire d’un nombre limité de dents. Un réducteur à engrenages harmoniques engage de nombreuses dents sur des zones de contact plus larges.
Harmonic Drive souligne que la flexspline et la cannelure circulaire s’engrènent sur deux zones le long de l’axe principal de l’ellipse du générateur d’ondes, et non pas en un seul point. L’engrènement continu des dents le long de l’axe principal permet d’éliminer tout jeu dans les réducteurs à ondes de déformation.
Cet engrènement de plusieurs dents améliore la répartition de la charge, réduit le jeu local entre les dents et augmente la rigidité en torsion.
Une précharge permanente maintient les dents en contact
Une autre raison importante est la précharge. Dans un système d’engrenage harmonique, la cannelure flexible est continuellement pressée contre la cannelure circulaire par le générateur d’ondes.
Cette précharge maintient un contact serré entre les dents lors de l’inversion de la charge. Harmonic Drive SE affirme qu’en raison de la précharge permanente, les engrenages Harmonic Drive ne présentent aucun jeu au niveau des dents, y compris lorsque la charge est inversée.
C’est pourquoi les motoréducteurs harmoniques conviennent aux applications nécessitant des mouvements fréquents en avant et en arrière, telles que les articulations de robots et les platines de positionnement de précision.
La flexspline compense les petites erreurs
Comme la flexspline est élastique, elle peut mieux absorber les petites variations de fabrication et d’assemblage qu’une paire d’engrenages complètement rigide. Cela permet de maintenir un engrènement fluide et de réduire le jeu.
Cependant, cela ne signifie pas que la flexspline est faible. La flexspline est conçue pour être flexible radialement mais rigide en torsion. Cela signifie qu’elle peut se déformer tout en transmettant le couple avec précision.
Jeu nul vs rigidité torsionnelle élevée
Un jeu nul ne signifie pas que le réducteur ne présente aucune déformation élastique. Il s’agit d’une distinction importante.
Le jeu désigne l’espace libre entre les dents des engrenages. La rigidité en torsion désigne la mesure dans laquelle la sortie se tord sous la charge.
Un motoréducteur harmonique peut présenter un jeu nul tout en affichant une légère déformation élastique sous l’effet du couple. C’est normal pour toute transmission mécanique. Pour les systèmes de haute précision, les ingénieurs doivent tenir compte à la fois du jeu et de la rigidité en torsion.
| Élément | Signification | Effet sur le mouvement |
| Jeu | Jeu entre les dents des engrenages | Provoque une perte de mouvement lors d’un changement de direction |
| Rigidité en torsion | Résistance à la torsion sous charge | Influence le positionnement sous couple |
| Erreur de transmission | Différence entre la position de sortie idéale et la position de sortie réelle | Influence la précision et la fluidité |
| Répétabilité | Capacité à revenir à la même position | Influence la précision et la stabilité du mouvement |
Pour les articulations de robot, l’absence de jeu permet d’éliminer le jeu, tandis qu’une rigidité en torsion élevée aide l’articulation à résister à la torsion sous une charge externe.
Pourquoi l’absence de jeu est importante dans le contrôle de mouvement
Meilleure précision de positionnement
Dans les servosystèmes, le contrôleur envoie des commandes de position précises. Si le réducteur présente un jeu, le codeur du moteur peut indiquer un mouvement, mais le côté sortie peut ne pas bouger immédiatement. Cela crée une erreur de positionnement.
Un motoréducteur harmonique réduit ce problème car la sortie réagit plus directement au mouvement du moteur.
Une répétabilité accrue
La répétabilité garantit que le système revient à la même position. L’absence de jeu contribue à améliorer la répétabilité car il y a moins de jeu aléatoire lors des changements de direction.
Ceci est important pour :
- Les bras robotiques
- La manipulation de plaquettes de semi-conducteurs
- Axes rotatifs CNC
- Équipements d’imagerie médicale
- Systèmes de réglage optique
- Machines d’inspection
Inversion de sens plus fluide
De nombreuses machines de précision nécessitent de fréquents changements de sens. En cas de jeu, chaque inversion peut entraîner des chocs, des vibrations ou un mouvement instable.
Un motoréducteur harmonique assure une inversion plus fluide, car les dents restent en prise sous précharge.
Stabilité améliorée des articulations des robots
Sur les robots, le jeu peut donner l’impression que les articulations sont lâches. Sur les robots humanoïdes, les robots collaboratifs ou les robots chirurgicaux, le jeu au niveau des articulations peut nuire à la sécurité et à la qualité des mouvements.
Les moteurs à engrenages harmoniques aident les articulations des robots à se déplacer avec plus de précision, à mieux maintenir leur position et à réagir de manière plus naturelle.
Moteur à engrenages harmoniques vs moteurs à engrenages traditionnels
| Caractéristique | Moteur à engrenages harmoniques | Moteur à engrenages planétaires | Moteur à engrenages droits | Moteur à vis sans fin |
| Jeu | Nul ou quasi nul | Faible à moyen | Moyen | Moyen |
| Engagement des dents | Engagement élastique de plusieurs dents | Contacts multiples entre les engrenages | Contact limité entre les dents | Contact glissant |
| Rapport de réduction | Élevé en une seule étape | Moyen à élevé | Généralement faible | Moyen à élevé |
| Compacité | Très compacte | Compact | Simple mais plus volumineux pour un rapport élevé | Souvent plus encombrant |
| Précision | Excellente | Bonne | Modérée | Modérée |
| Meilleure utilisation | Robotique, automatisation de précision, aérospatiale | Automatisation générale | Transmission simple | Transmission de couple à basse vitesse |
Un motoréducteur planétaire peut également offrir un bon couple et un encombrement réduit, mais il nécessite généralement un usinage très précis et plusieurs étages pour réduire le jeu. Un motoréducteur harmonique permet d’obtenir un jeu faible, voire nul, principalement grâce à sa structure à ondes de déformation élastiques.
Principaux avantages des moteurs à engrenages harmoniques sans jeu
Haute précision
L’absence de jeu permet à la sortie du moteur de suivre la commande d’entrée avec plus de précision. Cela est utile pour les machines qui nécessitent un positionnement angulaire précis.
Conception compacte
Les moteurs à engrenages harmoniques peuvent atteindre des rapports de réduction élevés en une seule étape. Harmonic Drive SE indique que les engrenages à ondes de déformation peuvent atteindre des rapports de réduction de 30:1 à 160:1 avec seulement trois composants, tandis que des solutions sur mesure peuvent atteindre des rapports encore plus élevés.
Densité de couple élevée
Comme la charge est répartie sur de nombreuses dents, les moteurs à engrenages harmoniques peuvent transmettre un couple élevé dans un boîtier compact. C’est pourquoi ils conviennent aux articulations de robots et aux modules d’automatisation compacts.
Mouvement fluide
L’engrènement continu des dents contribue à réduire les vibrations et améliore la fluidité du mouvement. Cela est particulièrement utile pour les applications qui exigent un fonctionnement silencieux et des mouvements stables.
Domaines d’application
Les moteurs à engrenages harmoniques sont largement utilisés dans les industries de précision où le contrôle du jeu est essentiel.
| Application | Pourquoi l’absence de jeu est-elle importante ? |
| Robots humanoïdes | Améliore la stabilité des articulations, l’équilibre lors de la marche et la précision des mouvements |
| Bras robotiques industriels | Permet un positionnement précis et des mouvements reproductibles |
| Équipements pour semi-conducteurs | Permet une manipulation précise des plaquettes et des mouvements d’inspection |
| Dispositifs médicaux | Assure des mouvements fluides, contrôlés et précis |
| Systèmes aérospatiaux | Prend en charge des mécanismes de précision compacts et fiables |
| Instruments optiques | Permet un réglage angulaire fin |
| Tables rotatives CNC | Améliore la précision d’indexation et la qualité d’usinage |
Idées reçues courantes sur l’absence de jeu
L’absence de jeu ne signifie pas l’absence d’erreur
Un motoréducteur harmonique peut éliminer le jeu entre les dents, mais d’autres erreurs peuvent subsister. Celles-ci peuvent inclure une erreur de codeur, une erreur de réglage de la commande, une déformation des roulements, un désalignement de l’arbre et une déformation élastique liée à la charge.
L’absence de jeu ne signifie pas une capacité de charge illimitée
Si le motoréducteur est surchargé, la précision et la durée de vie peuvent tout de même être affectées. Il est important de choisir le couple approprié.
L’absence de jeu nécessite une installation correcte
Même un motoréducteur harmonique de haute qualité peut présenter des performances médiocres si la surface de montage est inégale, si l’arbre est désaligné ou si la charge n’est pas correctement supportée.
Comment choisir un motoréducteur harmonique sans jeu
Lors du choix d’un motoréducteur harmonique, les acheteurs ne doivent pas se contenter de vérifier s’il présente un jeu nul. Ils doivent également évaluer l’ensemble du système de mouvement.
Les facteurs de sélection importants comprennent :
- Couple nominal
- Couple de pointe
- Rapport de réduction
- Rigidité en torsion
- Précision de positionnement
- Répétabilité
- Capacité de charge en sortie
- Type de moteur
- Résolution du codeur
- Cycle de service
- Encombrement
- Exigences en matière de durée de vie
Pour les applications haut de gamme, il est également important de vérifier l’inertie de la charge, l’accélération, les chocs, les performances thermiques et les conditions de lubrification.