Was ist der Unterschied zwischen Schrittmotor und Gleichstrommotor?
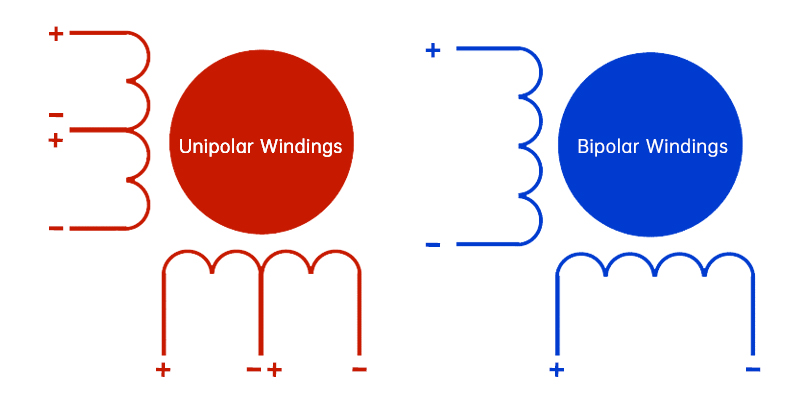
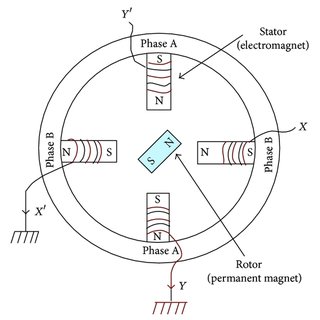
Wenn über Motoren gesprochen wird, die in verschiedenen mechanischen und elektronischen Anwendungen eingesetzt werden, werden häufig sowohl Schrittmotoren als auch Gleichstrommotoren erwähnt. Obwohl Schrittmotoren technisch gesehen eine Art Gleichstrommotor sind, unterscheiden sich ihr Design, ihre Funktionsweise und ihre Anwendung erheblich von herkömmlichen Gleichstrommotoren. Das Verständnis dieser Unterschiede ist für Ingenieure, Bastler und Techniker, die den richtigen Motor für ihre Projekte auswählen möchten, von entscheidender Bedeutung. Schrittmotor: Ein Untertyp des Gleichstrommotors Bevor wir die Unterschiede untersuchen, müssen wir unbedingt feststellen, dass Schrittmotoren eine Untergruppe der Gleichstrommotoren sind. Sowohl Schrittmotoren als auch herkömmliche Gleichstrommotoren laufen mit Gleichstrom (DC), was bedeutet, dass sie mit Elektrizität betrieben werden, die in eine Richtung fließt. Ihre Strukturen und Betriebsmethoden unterscheiden sich jedoch, was zu unterschiedlichen Eigenschaften und Verwendungen führt. Ein bestimmter Typ von Gleichstrommotor, der als Schrittmotor bezeichnet wird, ist so konstruiert, dass er sich in bestimmten Schritten bewegt. Im Gegensatz zu herkömmlichen Gleichstrommotoren, die sich kontinuierlich drehen, bewegen sich Schrittmotoren bei Anwendung elektrischer Impulse schrittweise um präzise Winkel (Schritte). Schrittmotoren eignen sich perfekt für Anwendungen, bei denen eine präzise Bewegung erforderlich ist, da ihre Schrittbewegung eine genaue Positionskontrolle ermöglicht. Wie funktionieren Schrittmotoren und Gleichstrommotoren? Um die Unterschiede zwischen Schrittmotoren und Gleichstrommotoren zu verstehen, ist es wichtig, zu untersuchen, wie jeder Motortyp funktioniert. Funktionsweise eines Schrittmotors Ein Schrittmotor besteht aus einem Rotor (einem magnetischen oder ferromagnetischen Kern), der von mehreren in Phasen angeordneten Statorspulen umgeben ist. Diese Spulen erzeugen Magnetfelder, die den Rotor entweder anziehen oder abstoßen, wodurch er sich schrittweise bewegt, je nachdem, in welcher Reihenfolge sie mit Strom versorgt werden. Jeder Schritt stellt einen Teil einer vollständigen Drehung dar, der normalerweise zwischen 1,8° und 15° liegt. Die sequentielle Aktivierung der Spulen kann durch einen Schrittmotortreiber oder einen Mikrocontroller gesteuert werden, wodurch sich der Motor präzise in vorgegebenen Schritten bewegen kann. Zu den wichtigsten Eigenschaften von Schrittmotoren gehören: Diskrete Bewegung: Eine genaue Kontrolle über Position und Drehung ist möglich, da sich Schrittmotoren in Schritten bewegen. Hohes Haltedrehmoment: Wenn sich ein Schrittmotor nicht dreht, kann er seine Position mit hohem Drehmoment halten. Impulsgesteuert: Schrittmotoren funktionieren, indem sie Stromimpulse erhalten, die die Anzahl der Schritte und die Bewegungsrichtung vorgeben. Betrieb von Gleichstrommotoren Herkömmliche Gleichstrommotoren arbeiten dagegen nach einfacheren Prinzipien. Ein Gleichstrommotor hat normalerweise einen Rotor (Anker) und einen Stator, der ein konstantes Magnetfeld erzeugt. Wenn Spannung an die Anschlüsse angelegt wird, fließt Strom durch die Ankerwicklungen und erzeugt ein Magnetfeld, das mit dem Magnetfeld des Stators interagiert. Diese Interaktion erzeugt ein Drehmoment, wodurch der Rotor kontinuierlich rotiert. Zu den wichtigsten Eigenschaften von Gleichstrommotoren gehören: Kontinuierliche Rotation: Gleichstrommotoren drehen sich kontinuierlich, wenn sie mit Strom versorgt werden, und eignen sich daher für Anwendungen, die eine gleichmäßige und kontinuierliche Bewegung erfordern. Einfache Bedienung: Sie sind unkompliziert zu steuern und erfordern oft nur eine variable Stromversorgung oder einen Motorregler zur Drehzahlregelung. Hohe Geschwindigkeit: Gleichstrommotoren können hohe Geschwindigkeiten erreichen, was bei Anwendungen wie Lüftern, Pumpen und anderen mechanischen Systemen nützlich sein kann. Schrittmotoren vs. Gleichstrommotoren Obwohl beide mit Gleichstrom betrieben werden, unterscheiden sich Schrittmotoren und Gleichstrommotoren erheblich in Aufbau, Steuerungsmechanismen und Anwendungen. Im Folgenden finden Sie eine Liste der Hauptunterschiede dieser beiden Motortypen: A. Bewegung und Positionierung Schrittmotor: Die Fähigkeit, sich in exakten, inkrementellen Schritten zu bewegen, ist das, was einen Schrittmotor auszeichnet. Aus diesem Grund sind Schrittmotoren ideal für Geräte wie Roboterarme, CNC-Maschinen und 3D-Drucker, die eine präzise Positionierung erfordern. Da die Anzahl der an den Motor abgegebenen Impulse bestimmt, wie viel Bewegung er macht, benötigen Schrittmotoren keine Rückkopplungssysteme, um an Ort und Stelle zu bleiben. Gleichstrommotor: Ein herkömmlicher Gleichstrommotor bietet kontinuierliche Drehung und ist besser für Anwendungen geeignet, bei denen eine gleichmäßige, ununterbrochene Bewegung erforderlich ist, wie z. B. bei Förderbändern und einfachen mechanischen Antrieben. Für die Positionssteuerung bei Gleichstrommotoren wird häufig ein externer Rückkopplungsmechanismus wie ein Potentiometer oder ein Encoder benötigt, um die Position zu verfolgen und zu ändern. B. Geschwindigkeitsregelung Schrittmotor: Durch Ändern der Eingangsimpulsfrequenz können Schrittmotoren eine genaue Geschwindigkeitsregelung erreichen. Ihre maximale Geschwindigkeit ist jedoch im Allgemeinen niedriger als die von Gleichstrommotoren, und das Drehmoment nimmt mit zunehmender Geschwindigkeit ab. Schrittmotoren funktionieren gut in Situationen, in denen sowohl präzise Bewegung als auch Geschwindigkeitsregelung erforderlich sind. Gleichstrommotor: Gleichstrommotoren zeichnen sich durch Hochgeschwindigkeitsbetrieb aus und sind zur Geschwindigkeitsregelung relativ einfach zu steuern. Die Geschwindigkeit kann durch Pulsweitenmodulation (PWM) oder Ändern der Eingangsspannung angepasst werden. Gleichstrommotoren halten das Drehmoment bei hohen Geschwindigkeiten besser aufrecht als Schrittmotoren. C. Drehmoment und Leistung Schrittmotor: Einer der Vorteile Ein Vorteil von Schrittmotoren ist ihre Fähigkeit, bei niedrigen Drehzahlen ein hohes Drehmoment aufrechtzuerhalten, wodurch sie sich ideal dafür eignen, eine Position auch ohne kontinuierliche Drehung fest zu halten. Dieses hohe Haltedrehmoment ist besonders nützlich bei Anwendungen, bei denen eine stationäre Position unter Last aufrechterhalten werden muss. Gleichstrommotor: Gleichstrommotoren können bei hohen Drehzahlen ein hohes Drehmoment liefern, aber ihr Drehmoment sinkt im Allgemeinen, wenn der Motor langsamer wird. Obwohl sie mit Getriebesystemen modifiziert werden können, um das Drehmoment zu erhöhen, verfügen sie nicht über die inhärente Fähigkeit, das Drehmoment im Stillstand ohne zusätzliche Steuerung aufrechtzuerhalten. D. Komplexität und Steuerung Schrittmotor: Das Steuerungssystem für Schrittmotoren ist komplexer als das für Gleichstrommotoren. Schrittmotoren erfordern spezielle Steuerungen oder Treiber, die Impulsfolgen senden, um den Motor in bestimmten Schritten zu drehen. Diese Komplexität ermöglicht jedoch eine genauere Steuerung der Bewegung und Position. Gleichstrommotor: Gleichstrommotoren sind einfacher zu steuern, da sie nur eine Stromquelle und optional einen Motortreiber oder -controller zum Einstellen der Geschwindigkeit benötigen. Die Richtungssteuerung kann mit einer einfachen H-Brückenschaltung verwaltet werden, wodurch sie für grundlegende Anwendungen einfacher zu implementieren sind. E. Rückmeldung und Genauigkeit Schrittmotor: Schrittmotoren haben den Vorteil, dass sie für die offene Positionierung keine Rückmeldungsgeräte benötigen. Die genaue Position wird durch die Anzahl der Impulse bestimmt, was ein hohes Maß an Genauigkeit garantiert. Ohne ein geschlossenes System besteht jedoch die Gefahr, dass bei hoher Belastung oder hohen Geschwindigkeiten Schritte verpasst werden. Gleichstrommotor: Für eine genaue Positionierung benötigen Gleichstrommotoren normalerweise ein Rückmeldungssystem, beispielsweise einen Encoder, der Informationen über die Position oder Geschwindigkeit des Motors liefert. Diese geschlossene Regelung sorgt für eine höhere Genauigkeit und korrigiert etwaige Abweichungen während des Betriebs. Die genaue Position wird durch