تلعب محركات التروس التوافقية دورًا مهمًا في الروبوتات البشرية الشكل، حيث توفر عزم دوران عاليًا وحجمًا صغيرًا وارتدادًا منخفضًا وتحكمًا دقيقًا في الحركة. وتُستخدم على نطاق واسع في آليات الكتفين والمرفقين والمعصمين والوركين والركبتين والكاحلين ومفاصل الخصر والرقبة.
بالنسبة للروبوتات البشرية الشكل، تؤثر جودة حركة المفاصل بشكل مباشر على ثبات المشي والتوازن والتعامل مع الأشياء والحركة الشبيهة بالبشر. تساعد محركات التروس التوافقية الروبوتات على التحرك بشكل أكثر سلاسة ودقة وموثوقية.
لماذا تحتاج الروبوتات البشرية إلى محركات تروس دقيقة
تختلف الروبوتات البشرية عن الآلات الصناعية البسيطة. فهي يجب أن تمشي، وتستدير، وتحافظ على توازنها، وترفع الأشياء، وتتفاعل مع الناس، وتؤدي حركات مرنة. تتطلب هذه الإجراءات عمل العديد من المفاصل معًا في نفس الوقت.
على سبيل المثال، عندما يمشي الروبوت البشري الشكل، يجب أن تنسق الورك والركبة والكاحل والخصر والجزء العلوي من الجسم بشكل مستمر. إذا كان هناك رد فعل عكسي أو تأخير كبير في أحد المفاصل، فقد يهتز الروبوت أو يفقد توازنه أو يتحرك بشكل غير طبيعي.
ونتيجة لذلك، يجب أن يفي نظام محركات المفاصل بمتطلبات الأداء الرئيسية.
| المتطلبات | أهمية ذلك في الروبوتات البشرية |
| عزم دوران عالي | يدعم وزن الجسم والمشي والرفع وحركة المفاصل |
| تأخر منخفض | يحسن دقة الحركة واستقرارها |
| حجم صغير | يتناسب مع أذرع وأرجل ومفاصل الروبوتات النحيفة |
| خفيف الوزن | يقلل من الحمل الإجمالي للروبوت واستهلاك الطاقة |
| حركة سلسة | يجعل الحركة أكثر طبيعية وشبيهة بحركة الإنسان |
| قابلية عالية للتكرار | يضمن استقرار الحركات أثناء المهام المتكررة |

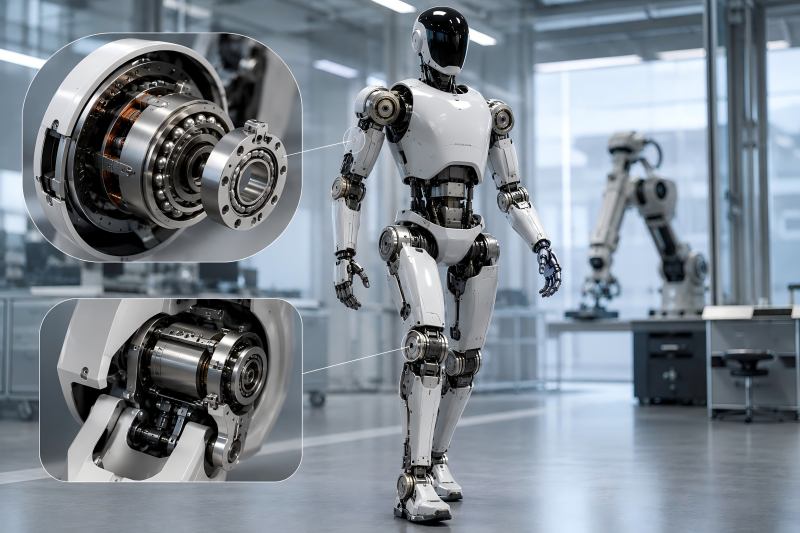
ما هو محرك التروس التوافقي؟
محرك التروس التوافقي هو نظام محرك يستخدم مخفض توافقي لتقليل السرعة وزيادة عزم الدوران. يتكون المخفض من مولد موجات، وخط منحني مرن، وخط دائري.
يعيد مولد الموجات تشكيل الشريحة المرنة لتصبح بيضاوية الشكل. مع دوران المحرك، تتشابك الشريحة المرنة مع الشريحة الدائرية. ونظرًا لوجود فرق بسيط في أسنان التروس، تنخفض سرعة الخرج بينما يزداد عزم الدوران الناتج.
تسمح هذه البنية لمحرك التروس التوافقي بتحقيق نسبة تخفيض عالية في مساحة صغيرة جدًا. وهو مفيد بشكل خاص للروبوتات البشرية، حيث تكون مساحة المفاصل محدودة ولكن الطلب على عزم الدوران مرتفع.
الدور الرئيسي لمحركات التروس التوافقية في الروبوتات البشرية
توفير عزم دوران عالي في المفاصل المدمجة
يجب أن تكون مفاصل الروبوتات البشرية صغيرة الحجم ولكنها قوية. لا يمكن لمفصل ذراع أو ساق أو خصر الروبوت استخدام علبة تروس صناعية كبيرة لأنها ستجعل الروبوت ضخمًا وثقيلًا.
تحل محركات التروس التوافقية هذه المشكلة من خلال توفير كثافة عزم دوران عالية. يمكنها توفير عزم دوران قوي مع الحفاظ على صغر حجم المفصل. يساعد ذلك مصممي الروبوتات على بناء أذرع أنحف وأرجل أخف وزنًا ونسب جسم أكثر شبهاً بالإنسان.
على سبيل المثال، يحتاج مفصل الكتف إلى عزم دوران كافٍ لرفع الذراع. تحتاج مفاصل الورك والركبة إلى عزم دوران أعلى لدعم المشي والوقوف. تساعد محركات التروس التوافقية على تلبية متطلبات عزم الدوران هذه دون شغل مساحة كبيرة.
تحسين دقة الحركة
غالبًا ما تحتاج الروبوتات البشرية إلى حركة دقيقة. عندما يلتقط الروبوت شيئًا ما، أو يلوح بيده، أو يضبط وضعيته، أو يدير رأسه، يجب أن يتوقف المفصل في الموضع الصحيح.
تتميز محركات التروس التوافقية برد فعل عكسي منخفض جدًا، مما يساعد على تقليل أخطاء تحديد الموضع. وهذا أمر مهم بالنسبة لـ:
- أذرع الروبوت
- الأيدي والأصابع
- دوران الرقبة
- حركة الخصر
- توازن المشي
- التعامل مع الأشياء
يسمح التفاعل المنخفض للروبوت بالتحرك بدقة أكبر وتكرار نفس الحركة عدة مرات بنتائج ثابتة.
دعم الحركة السلسة والشبيهة بالبشر
لا ينبغي أن يتحرك الروبوت البشري مثل آلة خشنة. يجب أن تكون حركته سلسة ومستقرة وخاضعة للسيطرة. تساعد محركات التروس التوافقية في تحقيق ذلك لأن تداخل تروسها مستمر ومضغوط.
تعد الحركة السلسة مهمة للروبوتات الخدمية والطبية والبحثية والإنسانية التفاعلية. عندما يتحرك الروبوت بشكل طبيعي، يبدو أكثر أمانًا وقبولًا لدى الناس.
على سبيل المثال، عندما يدير الروبوت رأسه أو يرفع ذراعه أو يثني ركبته، فإن حركة المفاصل السلسة تحسن تجربة المستخدم الإجمالية.
مجالات التطبيق في مفاصل الروبوتات البشرية
تختلف متطلبات الحركة باختلاف مفاصل الروبوت. تحتاج بعض المفاصل إلى عزم دوران عالٍ، بينما تتطلب مفاصل أخرى هيكلًا مدمجًا وتحكمًا دقيقًا.
| منطقة مفصل الروبوت | وظيفة محرك التروس التوافقي | الميزة الرئيسية |
| مفصل الكتف | يتحكم في رفع الذراع ودورانه | عزم دوران عالي وحجم صغير |
| مفصل الكوع | يدعم حركة ثني الذراع | حركة سلسة ودقيقة |
| مفصل الرسغ | يتيح وضع اليد بمرونة | رد فعل منخفض ودقة عالية |
| مفصل الورك | يدعم المشي وتوازن الجسم | قدرة تحمل عالية |
| مفصل الركبة | يتحكم في ثني الساق وتمديدها | عزم دوران قوي |
| مفصل الكاحل | يساعد على التوازن وثبات المشي | استجابة سريعة ودقة في التحكم |
| مفصل الخصر | يسمح بدوران الجسم وتعديل الوضع | حركة دورانية مستقرة |
| مفصل الرقبة | يتحكم في حركة الرأس | تشغيل سلس وهادئ |
لماذا تعتبر محركات التروس التوافقية مناسبة للروبوتات البشرية الشكل
نسبة تخفيض عالية
عادةً ما تستخدم الروبوتات البشرية محركات عالية السرعة، لكن مفاصل الروبوت تتطلب حركة أبطأ وأقوى. يمكن لمخفض التروس التوافقي توفير نسبة تخفيض عالية في مرحلة واحدة، مما يحول سرعة المحرك إلى عزم دوران مفصلي قابل للاستخدام.
يساعد ذلك الروبوت على التحرك بقوة وتحكم بدلاً من السرعة غير المنضبطة.
تأثير ارتدادي منخفض
يمكن أن يتسبب التباطؤ في ارتخاء المفاصل والاهتزاز وعدم دقة تحديد المواقع. في الروبوتات البشرية الشكل، يمكن أن يؤثر ذلك على توازن المشي والتحكم في الذراع والتعامل مع الأشياء.
تشتهر محركات التروس التوافقية بانخفاض التباطؤ، مما يساعد على تحسين استقرار الروبوت ودقته.
تصميم مدمج وخفيف الوزن
المساحة محدودة داخل مفاصل الروبوتات البشرية الشكل. تتميز محركات التروس التوافقية بأنها مدمجة، مما يسهل دمجها في الأذرع والساقين والمعصمين والكاحلين.
كما أن المفصل الأخف وزنًا يقلل من الحمل على المفاصل الأخرى. على سبيل المثال، إذا كان محرك الذراع أخف وزنًا، فإن مفصل الكتف يحتاج إلى عزم دوران أقل لرفع الذراع.
كثافة عزم دوران عالية
كثافة العزم تعني مقدار العزم الذي يمكن لنظام المحرك توفيره مقارنة بحجمه ووزنه. توفر محركات التروس التوافقية كثافة عزم عالية، وهو أمر ضروري لتصميم الروبوتات البشرية.
وهذا يسمح للروبوتات بأداء حركات أقوى دون استخدام مشغلات كبيرة الحجم.
محرك التروس التوافقي مقابل حلول مفاصل الروبوتات الأخرى
قد تستخدم الروبوتات البشرية أيضًا محركات التروس الكوكبية، أو مخفضات التروس الدائرية، أو محركات الدفع المباشر، أو أنظمة نقل الحركة بالحزام. ومع ذلك، غالبًا ما يتم اختيار محركات التروس التوافقية عندما تكون الدقة والصغر في الحجم هما الأولويتان الرئيسيتان.
| العنصر | محرك التروس التوافقي | محرك التروس الكوكبية | محرك الدفع المباشر |
| الارتداد | منخفض جدًا | منخفض إلى متوسط | لا يوجد تباطؤ في علبة التروس |
| كثافة العزم | عالية | متوسطة إلى عالية | أقل ما لم يكن المحرك كبير الحجم |
| الحجم | صغير جدًا | صغير الحجم | عادةً ما يكون أكبر |
| الدقة | ممتاز | جيد | ممتاز |
| نسبة التخفيض | عالية في مرحلة واحدة | تتطلب مراحل متعددة للحصول على نسبة عالية | لا يوجد تخفيض |
| التكلفة | متوسطة إلى عالية | متوسطة | مرتفعة للحصول على عزم دوران مرتفع |
| أفضل استخدام | مفاصل الروبوتات الدقيقة | مفاصل الأتمتة العامة | مفاصل التحكم في عزم الدوران المتطورة |
كيف تساعد محركات التروس التوافقية الروبوتات على المشي
يعد المشي من أصعب المهام بالنسبة للروبوتات البشرية. يجب على الروبوت الحفاظ على توازنه أثناء تحريك ساقيه، وتحويل وزنه، وتعديل وضعيته في الوقت الفعلي.
تساعد محركات التروس التوافقية في تحسين أداء المشي بعدة طرق.
أولاً، توفر عزم دوران كافٍ لمفاصل الورك والركبة والكاحل. يجب أن تدعم هذه المفاصل جسم الروبوت وتتحكم في حركة الساقين.
ثانياً، يساعد انخفاض الارتداد على تقليل حركة المفاصل غير المرغوب فيها. وهذا يحسن التوازن ويجعل المشي أكثر استقراراً.
ثالثاً، يقلل التصميم المدمج من وزن الساقين. فالساقان الأخف وزناً تتطلبان طاقة أقل للحركة، مما يساعد على تحسين الكفاءة.
رابعاً، يتيح تحديد الموضع الدقيق تحكماً أفضل في المشية. يمكن للروبوت وضع قدمه بدقة أكبر وتعديل وضعيته بسلاسة أكبر.
كيف تعمل محركات التروس التوافقية على تحسين أذرع وأيدي الروبوت
تحتاج أذرع الروبوت إلى الدقة والمرونة. قد يحتاج الروبوت البشري الشكل إلى التقاط الأشياء، أو حمل الأدوات، أو فتح الأبواب، أو الضغط على الأزرار، أو مصافحة الآخرين.
تعد محركات التروس التوافقية مفيدة في مفاصل الذراع لأنها توفر حركة سلسة ودقيقة. فهي تساعد الروبوت على التحكم في الكتف والكوع والمعصم بتكرار أفضل.
بالنسبة لأيدي الروبوت، يمكن استخدام محركات تروس توافقية أصغر حجمًا أو مشغلات دقيقة صغيرة للتحكم في حركة الأصابع. على الرغم من أن مفاصل الأصابع لا تستخدم جميعها محرك تروس توافقي، إلا أن هدف التصميم يظل كما هو: الحجم المدمج، والتحكم الدقيق، وعزم الدوران الموثوق.
عوامل الاختيار المهمة
عند اختيار محركات التروس التوافقية للروبوتات البشرية، يحتاج المهندسون إلى النظر في أكثر من عزم الدوران المقنن. يجب أن يتوافق المحرك مع نظام الروبوت بالكامل.
عزم الدوران وسعة الحمولة
يجب أن يوفر المحرك عزم دوران كافٍ للحركة وحمل الأحمال والتسارع وظروف الصدمات. عادةً ما تتطلب مفاصل الورك والركبة والكاحل عزم دوران أعلى من مفاصل المعصم أو الرقبة.
الوزن والحجم
يساعد المحرك الأصغر والأخف وزنًا في تقليل الوزن الإجمالي للروبوت. وهذا مهم بشكل خاص للروبوتات البشرية المتحركة التي تحتاج إلى وقت تشغيل طويل.
الارتداد ودقة تحديد الموضع
يعد انخفاض التباطؤ أمرًا بالغ الأهمية لاستقرار المشي، والتعامل مع الأشياء، والتحكم الدقيق في الوضع.
الكفاءة والتحكم في الحرارة
قد تعمل الروبوتات البشرية بشكل مستمر، لذا يمكن أن تؤدي الحرارة الزائدة للمحرك إلى انخفاض الكفاءة أو تقصير العمر التشغيلي أو تلف الأجزاء الداخلية.
عمر الخدمة
يعمل الشريط المرن داخل المخفض التوافقي من خلال التشوه المرن. لذلك، يجب مراعاة عمر التعب وجودة المواد والتشحيم وتصميم الحمل بعناية.
التحديات الشائعة
على الرغم من أن محركات التروس التوافقية مناسبة جدًا للروبوتات البشرية الشكل، إلا أنها تنطوي أيضًا على بعض القيود.
أحد التحديات هو التكلفة. عادةً ما تكون محركات التروس التوافقية أغلى من محركات التروس البسيطة. بالنسبة للروبوتات ذات المفاصل المتعددة، قد تكون التكلفة الإجمالية للمحركات عالية.
التحدي الآخر هو الحمل الصدمي. قد تؤثر الصدمات المفاجئة الناتجة عن السقوط أو القفز أو الحركة السريعة على عمر المخفض. يجب على المهندسين تصميم هوامش عزم دوران مناسبة وحماية ميكانيكية.
الحرارة مهمة أيضًا. قد يكون لمفاصل الروبوتات المدمجة مساحة تبريد محدودة، لذا يجب مراعاة التصميم الحراري منذ البداية.