스테퍼 모터는 높은 정밀도와 반복성으로 유명하여 자동화, 3D 프린팅, CNC 기계, 로봇 공학 분야에서 필수적인 선택입니다. 하지만 적절한 스테퍼 모터 드라이버가 없다면 아무리 좋은 스테퍼 모터라도 성능이 떨어질 수 있습니다. 스테퍼 모터 공급업체로서, 저희는 드라이버의 호환성이나 전력 부족으로 인해 시스템 장애가 발생하는 사례를 수없이 경험해 왔습니다.
스테퍼 모터 드라이버란 무엇인가?
스테퍼 모터 드라이버는 제어 신호에 따라 권선에 전류를 공급합니다. 컨트롤러나 마이크로컨트롤러(아두이노, STM32, PLC 등)에서 입력되는 스텝 및 방향 펄스를 해석하여 코일에 올바른 순서로 전원을 공급하여 회전을 구현합니다.
스테퍼 드라이버의 주요 기능:
- 제어 신호(단계 및 방향) 해석
- 코일에 공급되는 전류를 제어합니다.
- 더 부드러운 동작을 위해 마이크로 스테핑을 활성화하세요
- 모터 가속 및 감속 관리
- 과전류, 과열, 저전압으로부터 보호
운전자를 선택할 때 고려해야 할 주요 매개변수
스테퍼 모터 드라이버를 선택할 때는 먼저 모터의 전기적 및 기계적 특성에 맞춰야 합니다. 필수 요소는 다음과 같습니다.
모터 유형(단극형 vs 양극형)
| 모터 유형 | 설명 | 드라이버 요구 사항 |
| 단극성 | 중심 탭이 있는 코일을 사용. 구동이 쉽지만 토크가 낮음. | 단극성 드라이버(5 또는 6개의 전선)와 호환 |
| 양극성 | 중심 탭이 없으며, H-브리지가 필요. 더 많은 토크를 제공. | 양극성 드라이버(4개의 전선)가 필요 |
양극 모터는 토크 대 크기 비율이 더 좋기 때문에 더 일반적입니다.
전압 및 전류 정격
모터와 드라이버의 전압 및 전류 정격을 일치시키세요:
- 전류(A/상): 드라이버는 모터의 상당 정격 전류를 처리해야 합니다. 여유 전류를 확보하기 위해 항상 10~20% 더 높은 전류 용량을 가진 드라이버를 선택하십시오.
- 전압(V): 전압이 높을수록 고속 성능이 더 뛰어나지만 드라이버 한계 내에 있어야 합니다.
-
예시 스텝퍼 모터 정격 전류 권장 드라이버 전류 NEMA 17 (42HS40) 1.5 A 1.7 – 2.0 A NEMA 23 (57BYGH76) 2.8 A 3.0 – 3.5 A
마이크로스테핑 지원
마이크로스테핑은 동작의 부드러움과 해상도를 향상시킵니다. 일반적인 마이크로스테핑 수준은 다음과 같습니다.
| 마이크로스텝 모드 | 회전당 단계 수 (1.8° 모터) |
| 전체 단계 | 200 단계 |
| 반 단계 | 400 단계 |
| 1/4 단계 | 800 단계 |
| 1/16 단계 | 3200 단계 |
| 1/32 단계 | 6400 단계 |
마이크로 스텝이 많을수록 움직임이 더 부드럽지만 더 정확한 신호가 필요하고 토크가 약간 줄어들 수 있습니다.
제어 인터페이스
귀하의 제어 시스템에 맞는 드라이버를 선택하세요:
| 제어 유형 | 인터페이스 | 일반적인 사용 |
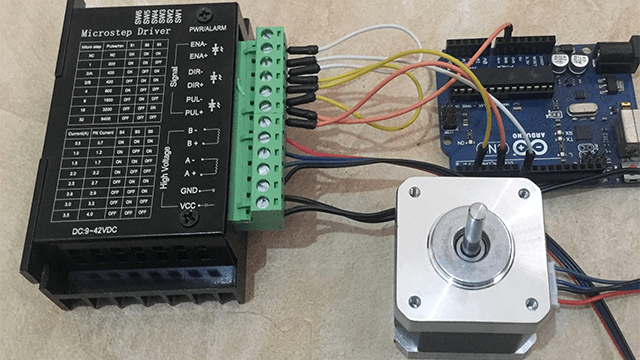
| Step/Dir | TTL 입력 | Arduino, PLC, CNC |
| UART/I2C | 직렬 버스 | 고급 마이크로컨트롤러 제어 |
| USB/CAN | 호스트 제어 | 로봇, 산업 제어 |
대부분의 응용 프로그램에서는 Step/Dir 제어가 가장 간단하고 폭넓게 지원됩니다.
핵심 드라이버 선택 기준
현재 등급 호환성
드라이버의 전류 정격은 모터의 상전류 정격과 거의 일치해야 합니다. 많은 최신 드라이버는 DIP 스위치나 소프트웨어를 통한 전류 조절 기능을 제공합니다. 전류가 부족하면 토크가 낮아지고, 전류가 과다하면 모터가 과열될 수 있습니다.
- 모범 사례: 모터 정격 전류보다 최소 10% 더 많은 전류를 지원하는 드라이버를 선택하세요. 하지만 모터의 최대 전류 정격을 초과해서는 안 됩니다.
전압 정격
전압이 높을수록 모터 속도와 동적 토크가 증가하지만 전력 손실도 증가합니다. 드라이버가 모터에 필요한 전압 범위를 지원하는지 항상 확인하십시오.
- 팁: 스테퍼 모터의 정격이 3V, 2A인 경우, 24V에서 작동하는 드라이버는 코일에 더 빠른 전원을 공급하여 성능을 크게 향상시킬 수 있습니다.
마이크로스테핑 기능
마이크로스테핑은 스텝을 분할하여 더욱 부드러운 동작과 정밀한 위치 분해능을 제공합니다. 애플리케이션에 필요한 분해능에 따라 드라이버를 선택하세요.
| 마이크로스텝 모드 | 회전당 단계 수 (1.8° 모터) |
| 전체 단계 | 200 단계 |
| 반 단계 | 400 단계 |
| 1/4 단계 | 800 단계 |
| 1/8 단계 | 1600 단계 |
| 1/16 단계 | 3200 단계 |
- 적용 팁: 3D 프린터나 카메라 위치 지정과 같은 정밀한 적용 분야에는 더 높은 마이크로스테핑을 사용하세요.
제어 인터페이스 호환성
드라이버가 모션 컨트롤러에서 제공하는 제어 신호 형식을 허용하는지 확인하세요.
- 단계/방향(CNC 및 3D 인쇄에 가장 일반적)
- 펄스 폭 변조(PWM)
- 직렬(UART/I²C/SPI)
- 아날로그 제어
- 산업용 애플리케이션을 위한 CANopen 또는 EtherCAT
드라이버 유형(초퍼 드라이브 대 L/R 드라이브)
| 유형 | 설명 |
| L/R 드라이버 | 간단하며, 저항을 사용해 전류를 제한하지만 효율이 낮음 |
| 초퍼 드라이버 | 고주파 스위칭을 사용해 전류를 동적으로 조절하며 효율적임 |
초퍼 드라이브는 성능과 효율성 면에서 이제 업계 표준이 되었습니다.
드라이버 유형 선택
가장 일반적인 드라이버 기술은 다음과 같습니다.
L/R(선형 저항) 드라이버
- 간단하고 저렴함
- 저속, 저성능 애플리케이션에 가장 적합
- 제한된 효율성
쵸퍼(PWM 전류 제어) 드라이버
- 펄스 폭 변조를 사용하여 코일 전류를 제어합니다.
- 더 효율적
- 마이크로 스테핑 및 동적 전류 제어 허용
- 예: A4988, DRV8825, TB6600
폐쇄 루프 스테퍼 드라이버
- 피드백을 위한 인코더를 포함합니다
- 단계 놓침 방지
- 서보와 같은 성능 제공
- 비용이 더 높고 까다로운 애플리케이션에 사용됨
-
드라이버 유형 비용 피드백 적합한 용도 L/R 드라이버 낮음 없음 기본 DIY 프로젝트 또는 교육용 PWM 드라이버 중간 없음 3D 프린터, CNC, 일반 자동화 클로즈드 루프 높음 있음 로봇, 정밀 운동, 무거운 하중
스테퍼 모터 드라이버 선택표
다음은 일반적인 스테퍼 모터와 적합한 드라이버에 대한 빠른 참조 차트입니다.
| 모터 모델 | 크기 | 전압 | 전류 | 적합한 드라이버 모델 | 마이크로 스테핑 | 노트 |
| 42HS40 NEMA 17 | 17 | 12V | 1.5A | A4988, DRV8825 | 1/16 | 3D 프린터에 적합 |
| 57BYGH76 NEMA 23 | 23 | 24–48V | 2.8A | TB6600, DM542 | 1/32 | CNC 라우터, 레이저 인그레이버 |
| 86BYG250 NEMA 34 | 34 | 48V | 6.0A | DM860, Leadshine CL86T | 폐쇄형 루프 | 중장비 애플리케이션 |
찾아야 할 추가 기능
드라이버를 선택할 때 다음 기능을 활용하면 성능과 안정성을 향상시킬 수 있습니다.
과전류 및 과열 보호
과부하나 과열로 인한 손상으로부터 모터와 드라이버를 보호합니다.
조정 가능한 전류 제한
모터 사양에 맞게 미세 조정이 가능하며 과도한 열을 방지합니다.
유휴 전류 감소
모터가 유휴 상태일 때 전류를 줄여 발열과 전력 소비를 줄입니다.
내장형 방열판 또는 팬
고전류 드라이버가 온도 안정성을 유지하는 데 필수적입니다.
전원 공급 장치와 일치하는 드라이버
전원 공급 장치가 두 가지 모두의 전압과 전류 요구 사항을 충족하는지 확인하세요.
| 모터 드라이버 | 권장 공급 전압 | 노트 |
| A4988 | 8–35V | 더 나은 성능을 위해 12V 또는 24V 사용 |
| DRV8825 | 8.2–45V | 중급 모터에 적합 |
| TB6600 | 9–42V | 속도에서 토크를 위해 24V 이상 사용 |
| DM542 | 18–50V | 산업용 등급, NEMA 23에 탁월함 |
- 경험 법칙: 총 전류 = 모터 정격 전류의 1.5배(마진용)
응용 프로그램 예제
예시 1: 3D 프린터(NEMA 17 + A4988)
- 낮은 토크, 높은 정밀도
- 저렴한 비용, 공간 제약
- 드라이버: A4988 또는 DRV8825
- 전원: 12–24V @ 2A
예 2: CNC 라우터(NEMA 23 + TB6600)
- 중간 토크, 빠른 동작
- 드라이버: TB6600 또는 DM542
- 전원: 24–48V @ 4A
예 3: 컨베이어 벨트 시스템(NEMA 34 + 폐쇄 루프 드라이버)
- 높은 토크와 피드백이 필요합니다
- 드라이버: Leadshine CL86T
- 전원: 48V @ 6–8A
피해야 할 일반적인 실수
- 과소평가된 드라이버 전류: 단계 건너뛰기나 동작 정지로 이어질 수 있습니다.
- 잘못된 제어 인터페이스: 마이크로컨트롤러나 PLC와의 통신에 오류가 발생합니다.
- 냉각 불량: 과열 및 드라이버 종료로 이어집니다.
- 노이즈가 있는 동작: 마이크로 스테핑이 부족하거나 PWM 주파수가 낮으면 발생합니다.
- 과구동 전압: 드라이버나 모터 절연이 손상됩니다.
적합한 드라이버를 선택하는 것은 단순히 사양을 맞추는 것만이 아닙니다. 애플리케이션 요구 사항, 모터 특성, 그리고 성능 목표를 이해해야 합니다. 적합한 드라이버는 부드럽고 효율적이며 오래 지속되는 스테퍼 작동을 보장합니다.
취미용 3D 프린터를 제작하든 산업용 CNC 시스템을 제작하든, 이 가이드를 사용하여 전류, 전압, 제어 방식, 마이크로 스테핑, 보호 기능 등을 기준으로 드라이버 옵션을 비교해 보세요.
아직도 확신이 없으신가요? 저희는 전문 스테퍼 모터 및 드라이버 공급업체로서 기술 지원을 제공하고 고객의 애플리케이션 요구 사항에 맞는 드라이버를 찾아드립니다. 언제든지 문의하세요!