ブラシ付きDCモーターとブラシレスDCモーターの比較:総合ガイド
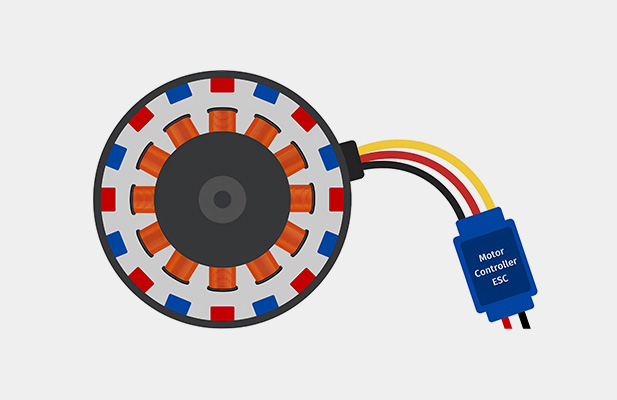
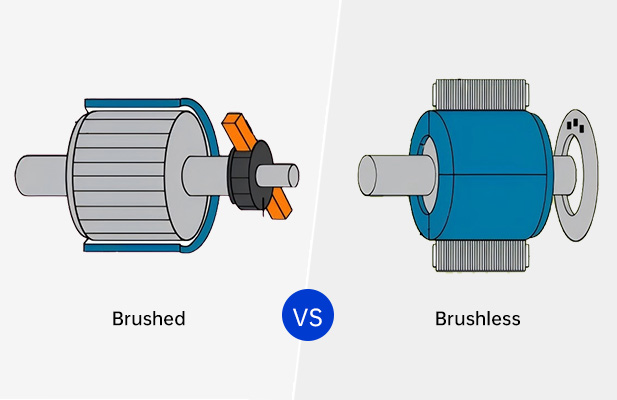
プロジェクトに最適なモーターを検討する際、ブラシ付きDCモーターとブラシレスDCモーター(BLDC)のどちらを選択するかは、性能、コスト、そして寿命に大きな影響を与える可能性があります。どちらのモーターにもそれぞれ長所と短所があり、最適なモーターを選択するには、その主な違いを理解することが重要です。 この記事では、ブラシ付きDCモーターとブラシレスDCモーターの主な違いを、設計、効率、メンテナンス、コスト、そして用途に焦点を当てて詳しく解説し、データに基づいた比較結果を提供します。 ブラシ付きDCモーター ブラシ付きDCモーターの動作は、アンペールの法則と電磁誘導の法則に基づいています。モーターは、ステーター、ローター、ブラシ、整流子などの部品で構成されています。DC電源がブラシを介してモーターに電力を供給すると、ステーターは静止磁界を発生させ、ローターはブラシと整流子を介して電源に接続され、回転磁界を形成します。 この回転磁界とステーター磁界の相互作用によって生じる電磁トルクによってモーターは回転します。モーターの動作中、ブラシは整流子上を摺動することで電流整流を行い、モーターを連続的に回転させます。 主な特性: ブラシ:ブラシ付きモーターには、整流子と接触して電気経路を形成する物理的なブラシが搭載されています。 整流子:モーターの巻線の電流方向を切り替える機械式スイッチです。 巻線の配置:巻線はローター上にあります。 磁石の配置:永久磁石はステーターの周囲に配置されています。 ブラシレスDCモーター(BLDC) ブラシ付きDCモーターとは異なる動作をする同期モーターをBLDCモーターと呼びます。ブラシレスDCモーターのローターには永久磁石が、ステーターには巻線が内蔵されています。コントローラは、ステーター巻線に特定の電流波形を印加することで回転磁界を発生させます。この回転磁界とローターの永久磁石が生成する磁界との相互作用によって生じる電磁トルクによってモーターが回転します。 モーターの動作中、コントローラはローターの位置情報を検出し、ステーター巻線に流れる電流波形を調整することで、モーターを精密に制御します。 主な特徴: 電子整流:BLDCモーターは、電流を変化させるために機械式ブラシを使用する代わりに、電子制御装置を採用しています。 ローターの永久磁石:ロー