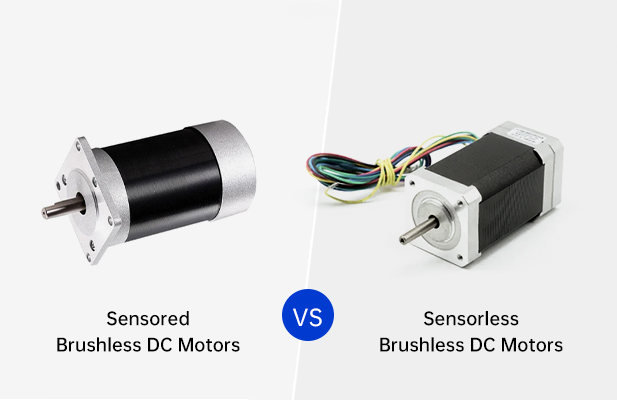
センサ付きブラシレスDCモータとセンサレスブラシレスDCモータ:主な違いを理解する
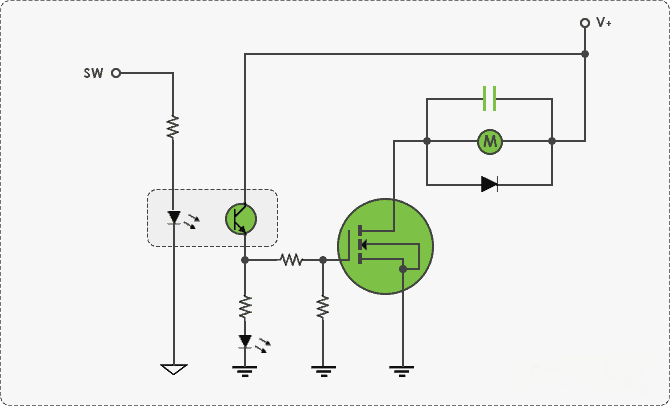
ブラシレスDC(BLDC)モーターは、幅広い用途において高い効率、信頼性、そして高性能を提供し、現代工学の礎となっています。電気自動車からドローン、ロボット工学、家電製品まで、あらゆる分野で広く普及しています。BLDCモーターは従来のブラシ付きモーターに比べて効率が高いですが、制御機構に基づいてセンサー付きモーターとセンサーレスモーターの2つの主要なタイプに分類できます。 ブラシレスDCモーターの種類とは? BLDCモーターの動作における課題は、ステーター巻線のスイッチングを同期させるためにローターの位置を決定することです。BLDCモーターには、主に以下の2つの種類があります。 センサー付きBLDCモーター:これらのモーターは、センサーを使用してローターの位置を検出します。 センサーレスBLDCモーター:これらのモーターは、逆起電力(back-EMF)信号を使用してローターの位置を検出します。 センサー付きBLDCモーター センサー付きBLDCモーターには、位置センサー(通常はホール効果センサー)が搭載されており、ローターの正確な位置をモーターコントローラーにフィードバックします。ステーターに固定されたこれらのセンサーは、ローターの磁場を検出します。モーターコントローラーはこの情報を用いて整流プロセスを正確に同期させ、特に低速時の制御性を向上させます。 センサー付きBLDCモーターの仕組み ホール効果センサーはステーターの様々な場所に配置され、ローターからの磁場を監視します。これらのセンサーはローターの正確な位置を示す信号を生成し、コントローラーは巻線をいつ通電するかを決定します。これらのセンサーからのフィードバックにより、モーターは極めて低速でもスムーズに動作し、優れたトルク制御を実現します。 センサー付きBLDCモーターの利点 スムーズな低速性能:センサー付きモーターは低速でも安定したスムーズな性能を発揮するため、ロボットや電気自動車など、精密な制御が不可欠なアプリケーションに最適です。 効率的な起動:センサー付きモーターは、ローターの初期動作を必要とせず、簡単かつスムーズに起動できます。特に、頻繁に起動と停止を繰り返すアプリケーションに有効です。 高負荷時の信頼性の高い動作:センサーが継続的に位置フィードバックを提供するため、モーターコントローラーは適切な電