サーボモーターとステッピングモーターの徹底比較
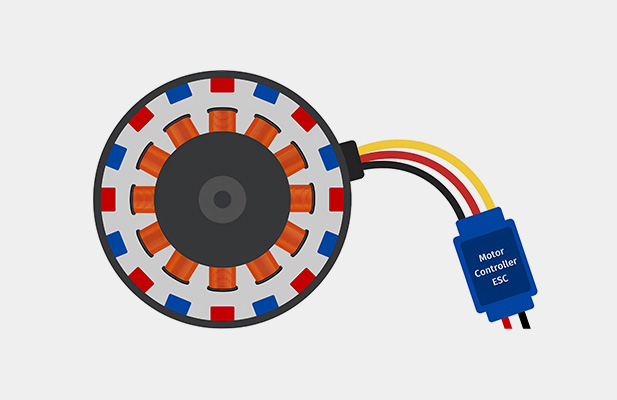
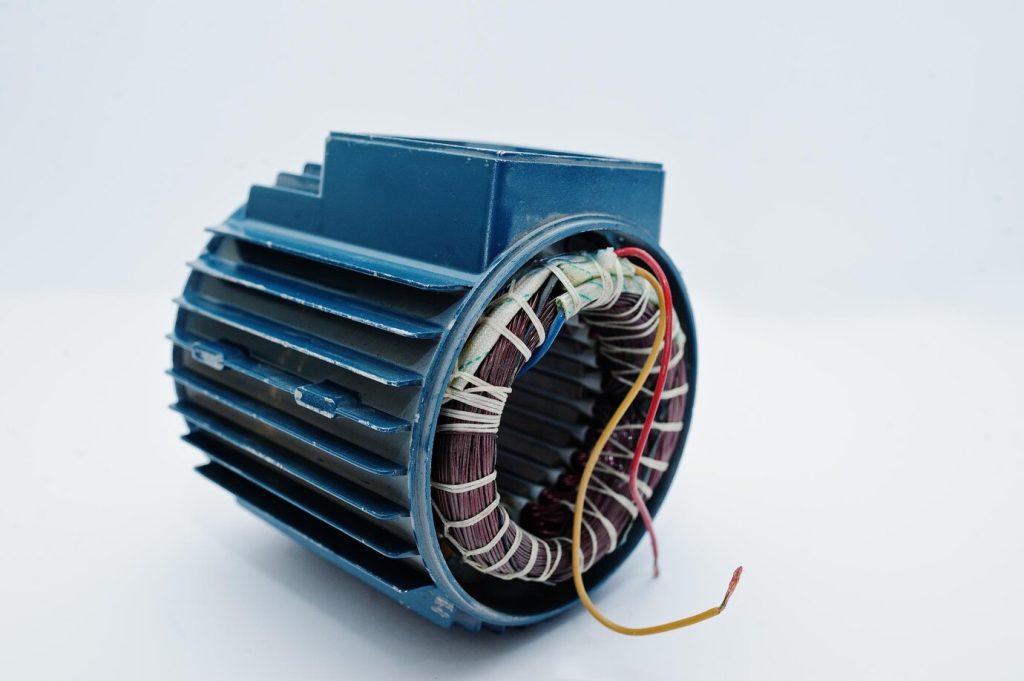
サーボモーターとステッピングモーターは、ロボット工学、オートメーション、CNC機械などの業界で最も一般的に使用されている2種類のモーターです。どちらもアクチュエーターとして機能しますが、どちらを選択するかは、トルク、速度、システム制御などのさまざまな性能要因によって異なります。 サーボモーター サーボモーターは、加速度、速度、角度、直線位置を正確に制御できるという特長があります。サーボモーターは閉ループシステムであり、フィードバックによって性能を監視し、それに応じてモーターの位置を調整します。優れた精度と応答性により、サーボモーターは産業オートメーション、ロボット工学、CNC機械で広く利用されています。 利点: 閉ループ制御による高精度・高精度。 安定したトルク出力で高速運転が可能。 高負荷時でもステップロスなく動作。 必要な電流のみ消費するため、電力効率に優れています。 短所: エンコーダやコントローラなどの追加コンポーネントにより、コストが高くなります。 セットアップが複雑になり、チューニングとキャリブレーションが必要になります。 メンテナンスもより高度なレベルが必要になります。 ステッピングモーター 一方、ステッピングモーターは明確なステップで動作するように作られています。オープンループシステムであるため、位置制御にフィードバックを必要とせずに動作します。3Dプリンター、繊維機械、その他の自動化プロセスなど、再現性と正確な位置決めが不可欠なアプリケーションでは、ステッピングモーターが頻繁に使用されます。 利点: 精密制御を必要とするアプリケーション向けのシンプルで低コストなソリューションです。 定電流を必要とせず、高い保持トルクを実現します。 フィードバックが不要なため、シンプルな制御システムです。 低速・高トルクのアプリケーションに最適です。 短所: 速度範囲が制限され、高速回転時にはトルクが急激に低下します。 負荷がかかった状態ではステップが失われる可能性があり、エラーを修正する方法はありません。 保持中でも継続的に電流を消費するため、電力効率が低くなります。 動作原理の比較 サーボモーターの動作原理 サーボモーターは、フィードバックループ(エンコーダなど)を使用して実際の位置を常に監視し、コントローラから送信される目標位置に基づいて位置を調整します。こ