DCサーボモータの伝達関数に対するモータパラメータの影響
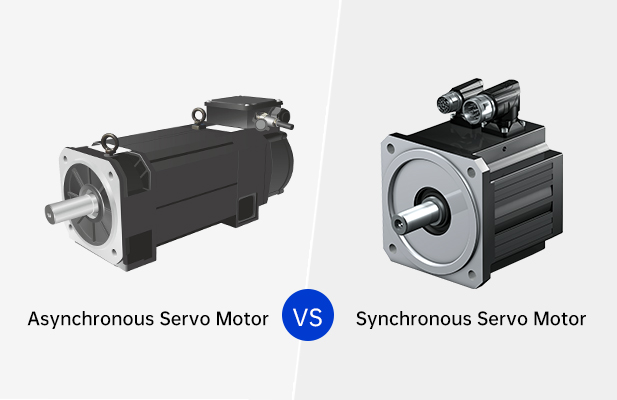
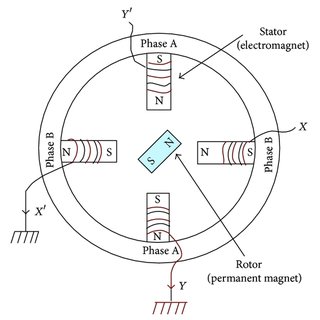
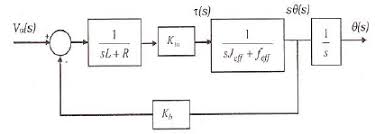
DCサーボモーターの伝達関数は、モーターの入力(通常は電圧または電流)と出力(通常は速度または位置)の関係を周波数領域で表します。この数学モデルは、ロボット工学、CNC工作機械、自動車システムなど、様々なアプリケーションにおけるモーターの挙動を制御する制御システムの設計に不可欠です。 伝達関数の精度は、抵抗(R)、インダクタンス(L)、摩擦(b)など、モーターの入力応答のダイナミクスに影響を与える様々なモーターパラメータの影響を受けます。 DCサーボモーターの伝達関数を理解する 特定のパラメータの影響について詳しく説明する前に、DCサーボモーターの伝達関数の基本構造を理解することが重要です。一般的なDCモーターは、以下の要素で構成されています。 電機子抵抗 (R): モーターの巻線の抵抗。 電機子インダクタンス (L): 電機子巻線のインダクタンス。 逆起電力 (EMF): モーターの回転によって発生する電圧で、入力電圧に逆らうもの。 モーター慣性 (J): 回転速度の変化に対するモーターの抵抗。 ダンピング (b): モーターの回転に逆らう摩擦力。 トルク定数 (K_T): 入力電流とモーターの出力トルクの比例定数。 逆起電力定数 (K_E): モーター速度と発生する逆起電力の比例定数。 DC モーターの伝達関数は次のように表すことができます。 どこ: ω(s)\omega(s)ω(s)はモータの角速度(出力)、 V(s)V(s)V(s)は入力電圧、 sssはラプラス領域における複素周波数変数です。 伝達関数に対する抵抗(R)の影響 電機子巻線の抵抗は、モータの電気的時定数を決定する上で重要な役割を果たし、モータの過渡特性と定常特性の両方に影響を与えます。抵抗値はモータシステムの減衰に直接影響し、伝達関数の分母に組み込まれます。具体的には、抵抗はモータの挙動の以下の側面に影響を与えます。 速度応答:抵抗値が高いほど巻線でのエネルギー損失が大きくなり、加速が遅くなり、モーターの応答性が低下します。抵抗値の増加はシステムの減衰不足を引き起こし、整定時間が長くなる可能性があります。 消費電力:抵抗値の増加は熱として消費される電力を増加させ、モーターの効率を低下させ、システムの熱負荷を増加させます。 安定性:抵抗値はモーターの減衰比を制御する上で重要なパラメータです。抵