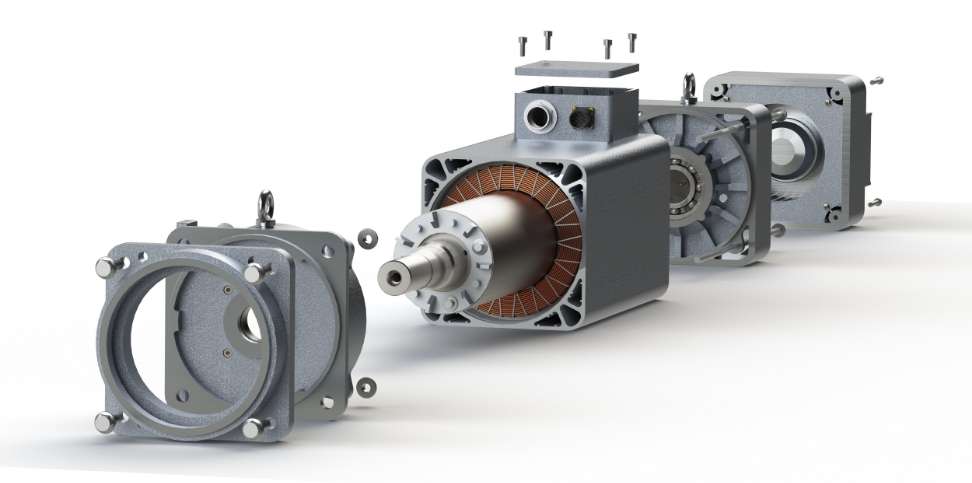
サーボモーターの構造:詳細な概要
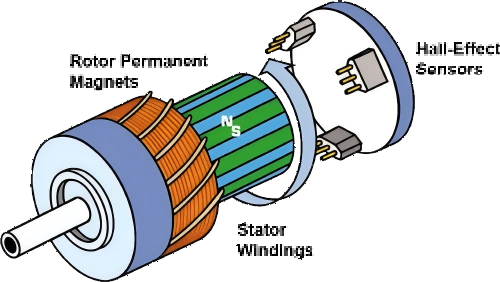
現代の多くの自動化システム、ロボット工学、CNC装置、精密アプリケーションにおいて、サーボモーターは不可欠な部品です。その設計と製造技術により、位置、速度、トルクを極めて高精度に制御できます。 サーボモーターの内部構造を理解することは、特定のアプリケーションに適したモーターを選択する上で重要です。この記事では、サーボモーターの構造、構成部品、そしてそれぞれの機能について詳しく見ていきます。 サーボモーターとは? サーボモーターと呼ばれる電気機械装置は、トルク、速度、角度位置を正確に制御できます。ロボット工学、CNCマシン、自動化システム、そして高性能なモーション制御を必要とするアプリケーションで広く利用されています。標準的なモーターとは異なり、サーボモーターは通常、フィードバックシステム(エンコーダなど)と統合されており、性能を継続的に監視・調整することで、モーターが制御コマンドに従って動作することを保証します。 サーボモーターの主要部品 サーボモーターの構造は比較的複雑で、精密な制御を実現するために連携して動作する複数の重要な部品で構成されています。これらの部品は以下のとおりです。 Stator ローター Feedback System (Encoder or Resolver) Controller Power Supply 各コンポーネントを詳しく見ていきましょう。 ステーター サーボモーターのステーターは固定部品です。銅コイルが巻かれた積層鋼板で構成され、ACまたはDC電源に接続されます。これらの巻線に電気が流れると、ローターと相互作用する磁場が発生し、回転運動を生み出します。 機能:ACサーボモーターの場合、この磁場は交流電流によって生成されますが、DCサーボモーターの場合は、モーター巻線に供給される直流電流によって磁場が生成されます。 構造:ステーターは通常、渦電流によるエネルギー損失を低減する薄い電磁鋼板(積層板)で作られています。銅またはアルミニウムの巻線を使用することで、電気伝導性を最大限に高めることができます。 ローター ローターは永久磁石(永久磁石型サーボモーターの場合)または電磁石(誘導型サーボモーターの場合)で構成されます。機械出力は、ローターが取り付けられたシャフトを介して負荷に伝達されます。 機能:ローターの役割は、ステーターの磁界内