ギアモーター選定ガイド:出力、トルク、速度の最適な組み合わせ方
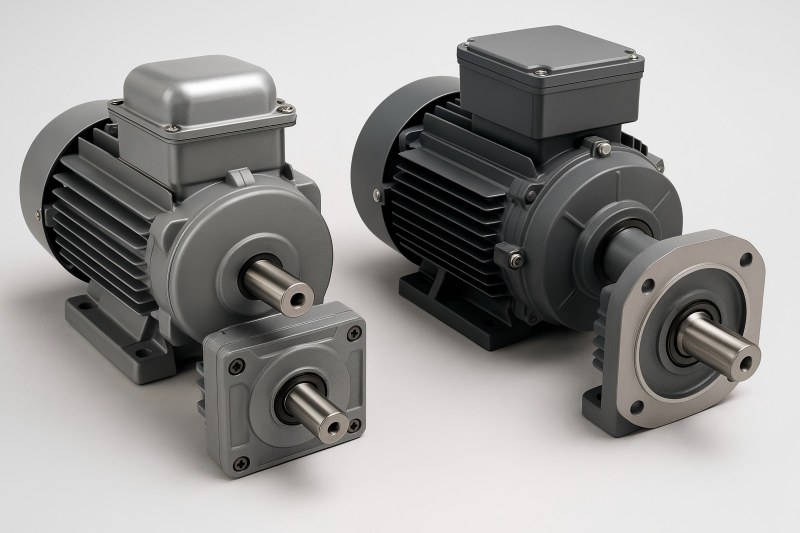
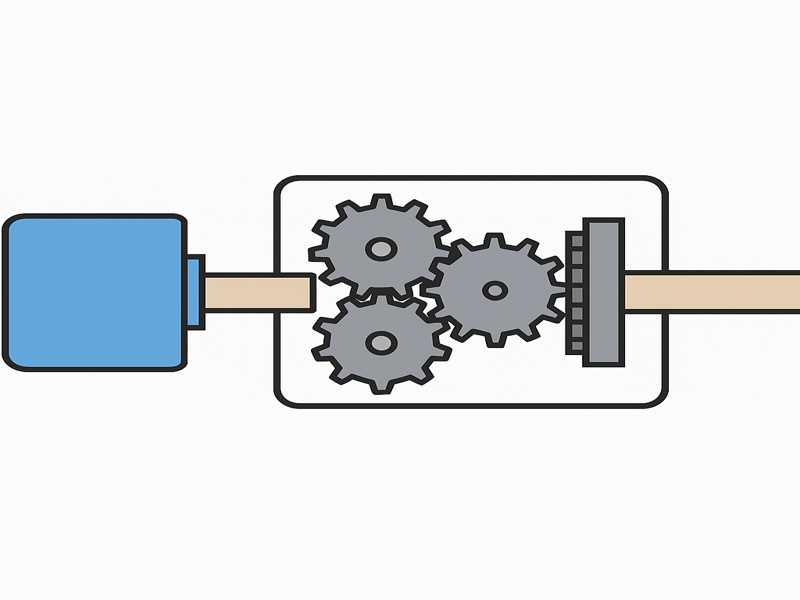
適切なギアモーターを選択することで、信頼性と効率性に優れた運用を実現できます。コンベアベルトの自動化、包装ラインの駆動、ロボットの駆動など、用途が多岐にわたる場合でも、適切なギアモーターのサイズ選定により、過剰な設備投資や早期故障のリスクを回避しながら、システムが期待通りの性能を発揮することを保証します。 ギアモーターのサイズが重要な理由 ギアモーターは、電動モーターとギアボックスを組み合わせることで、トルクを増幅し、速度を低下させます。サイズが適切でない場合、効率の低下、損傷、または故障のリスクがあります。 モーターのサイズが小さすぎると、過熱したり、停止したり、早期に摩耗したりします。 モーターが大きすぎると、エネルギーが無駄になり、コストがかさみ、不必要なスペースを占有します。 サイズが不正確な場合、不正確な動作制御、機械的ストレス、または生産停止につながる可能性があります。 製造業者にとって、適切なサイズ設定は単なる技術的な作業ではなく、生産性、エネルギー消費、メンテナンス コスト、機器の寿命に影響を与えるビジネス上の意思決定でもあります。 ギアモーターの基礎を理解する サイズを決める前に、3 つの主要なパラメータを確認しましょう。 トルク トルクとは、モーターが負荷を駆動するために提供する回転力です。ギアモーターでは、ギア減速によってトルクが増幅されるため、小型のモーターでも低速で重い負荷を動かすことができます。 スピード 速度とは、ギア減速後の出力回転速度を指します。ギアボックスは、コンベアの直線速度やドラムの回転速度など、アプリケーションの要件に合わせてモーターの速度を減速します。 力 出力は、仕事を行う速度、つまりモーターがどれだけの機械的エネルギーを供給できるかを表します。トルクと速度を結び付け、通常はワットまたは馬力で表されます。 これら 3 つのパラメータ間のバランスを理解することで、ギア モーターが満たす必要のある動作ウィンドウを定義するのに役立ちます。 ギアモーターのサイズ決定プロセスのステップバイステップ ステップ1: アプリケーション要件を定義する まず、ギア モーターが実行する正確な機械的タスクの概要を説明します。 動作の種類: 直線、回転、停止・開始、または連続動作タイプ 荷重特性: 定常、変動、または突然の衝撃荷重 希望する速度