サーボモーターは、位置、速度、トルクを精密に制御できるため、高い性能が求められるシステムに最適です。しかし、サーボモーターの制御は複雑なプロセスであり、特定の要件に基づいて最適な性能を実現するために、さまざまな制御手法が用いられます。
この記事では、サーボモーターによく使用される5つの制御手法を取り上げ、それぞれの特徴、利点、最適な使用シナリオについて説明します。また、これらの制御手法の違いをより明確に理解するための図表もいくつか掲載しています。
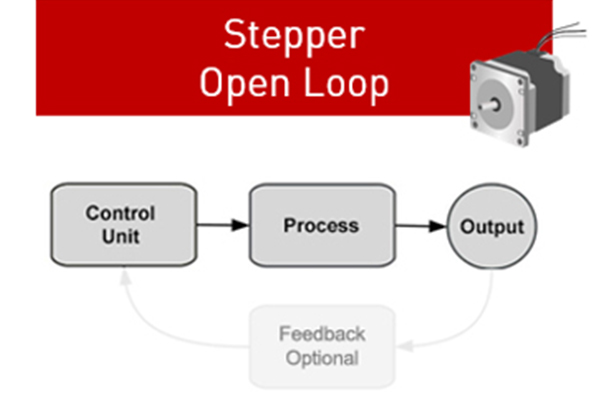
オープンループ制御
オープンループ制御は、サーボモーター制御の最もシンプルな形式です。このシステムでは、モーターはフィードバック機構を介さずに、速度、位置、トルクなどの設定値に基づくコマンドを受け取ります。タスクを実行するには、コントローラがサーボモーターに信号を送り、サーボモーターはこの入力に応じて反応します。
オープンループ制御では、モーターの性能を継続的に監視しません。そのため、システムに変化が生じたり、外乱(負荷や摩擦の変動など)が生じたりすると、モーターがそれに応じて調整できない可能性があります。
特長と利点
- シンプルさ:オープンループ制御システムは、フィードバックセンサーや複雑なアルゴリズムを必要としないため、シンプルで実装が容易です。
- コスト効率:追加のセンサーが不要なため、クローズドループシステムに比べてシステムコストが低くなります。
- 要求の低いアプリケーションに適しています:オープンループ制御は、精度がそれほど重要ではなく、外部からの干渉が最小限に抑えられるアプリケーションに適しています。
制限事項
- フィードバックなし:オープンループ制御の最大の欠点は、位置、速度、トルクの誤差を補正できないことです。
- パフォーマンスの不安定さ:負荷や外力が変化した場合、モーターが期待どおりに動作しない可能性があります。
ユースケース
- 小型ロボットまたは自動化システム。
- 精度要件が低いアプリケーション。
- 趣味のプロジェクトまたは教育用セットアップ。
| 制御方式 | システムの複雑さ | コスト | 位置精度 | フィードバック使用 |
| オープンループ制御 | 低い | 低い | 低い | なし |
| クローズドループ制御 | 高い | 高い | 高い | あり |
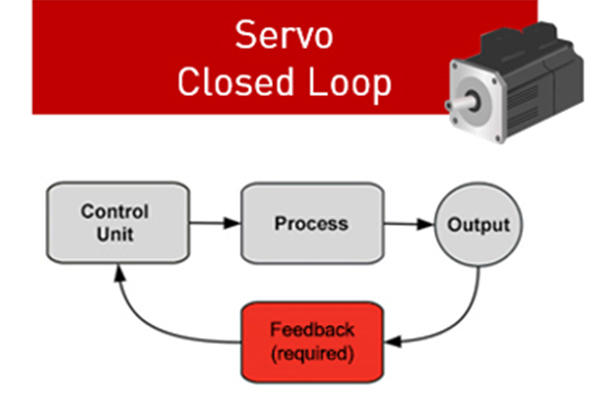
閉ループ制御(フィードバック制御)
サーボモーターを制御するためのより高度な技術として、閉ループ制御(フィードバック制御とも呼ばれます)があります。閉ループシステムでは、エンコーダ、レゾルバ、タコメータなどのフィードバックデバイスを用いて、モーターの位置、速度、トルクを監視します。
誤差信号と呼ばれる誤差に基づいて、コントローラはモーターの性能をリアルタイムで調整し、所望の出力を実現します。
この継続的なフィードバック機構により、モーターは正確な位置、速度、トルクを維持するために自己調整を行います。
特長と利点
- 精度:閉ループシステムは高い精度を提供し、負荷、摩擦、環境条件の変動を補正できます。
- 適応性:フィードバックにより、システムは負荷の変化や予期せぬ外乱に適応できるため、システムの堅牢性が向上します。
- 高効率:閉ループ制御は、モーターがシステムのニーズに合わせて動作を調整できるため、エネルギーの無駄を最小限に抑えます。
制限事項
- 複雑さ:閉ループ制御システムにはエンコーダやコントローラなどの追加コンポーネントが必要となるため、開ループシステムよりも複雑でコストがかかります。
- 高コスト:フィードバック機構とより高度なコントローラが必要となるため、閉ループ制御システムはより高価です。
ユースケース
- 産業オートメーションシステム。
- CNCマシンとロボット工学。
- 医療機器などのアプリケーションでは、高い精度が求められます。
| パラメータ | オープンループ制御 | クローズドループ制御 |
| フィードバック機構 | なし | 連続的なフィードバック |
| 精度 | 低い | 高い |
| システムの複雑さ | シンプル | 複雑 |
| コスト | 低い | 高い |
| 適用範囲 | 低要求タスク向き | 高精度タスク向き |
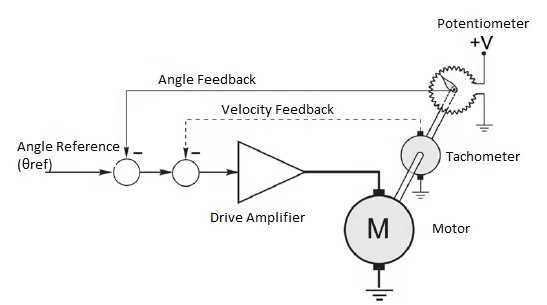
位置制御
位置制御は、サーボモーターの位置を正確に制御することに重点を置いています。この方法では、コントローラがモーターに信号を送り、特定の位置に移動させます。フィードバック機構によって、モーターはその位置に到達し、保持されます。ロボットやCNC工作機械など、正確な位置決めが求められるアプリケーションでは、このシステムに大きく依存しています。
位置制御では、コントローラはモーターの位置を継続的に監視し、入力信号を調整して目標位置からの偏差を補正します。この方法は、精度を向上させるために、閉ループ制御と組み合わせて実装されることがよくあります。
機能と利点
- 高精度:高精度な位置決めを実現し、ロボット工学、自動製造、医療用途に最適です。
- リアルタイム調整:モーターは、負荷の変化や外乱が発生した場合でも、正確な位置に到達するために継続的に調整できます。
- 汎用性:特定の角度または直線位置決めが必要な用途に最適です。
制限事項
- 複雑なセットアップ:モーターの動きを正確に制御するには、高精度なフィードバックデバイス(エンコーダなど)とアルゴリズムが必要です。
- 高コスト:より多くのセンサーと制御が必要になるため、システムのコストが高くなります。
ユースケース
- CNCマシンと3Dプリンター。
- ロボットアームと自動ピックアンドプレースシステム。
- 精密製造プロセス。
| 制御方式 | 主な目的 | 精度 | 速度制御 | 負荷補償 |
| 位置制御 | 位置精度 | 高い | 制限あり | 高い |
| 速度制御 | 速度の安定化 | 中程度 | 高い | 中程度 |
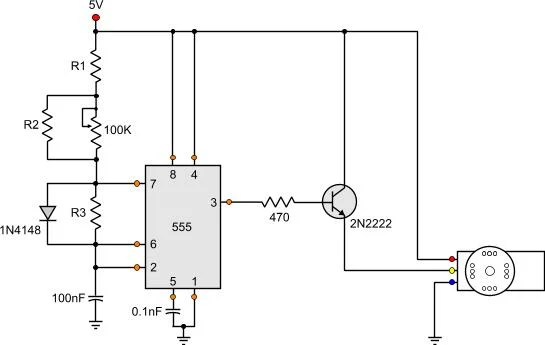
速度制御
速度制御では、入力信号を変化させることでモーターの速度を調整し、負荷変動やその他の外乱の影響を受けても一定速度を維持します。速度制御は、位置精度よりも一定速度の維持が重要なアプリケーションにとって非常に重要です。
多くの場合、速度制御は閉ループ制御などの他の制御方法と組み合わせて使用され、モーターが所定の速度を維持し、負荷変動に適応できるようにします。
特長と利点
- 一貫性:速度制御により、負荷が変動してもモーターは一定速度で動作します。
- 効率:位置精度よりも速度維持が重要なアプリケーションにおいて、消費電力を削減します。
- シンプルさ:位置制御よりも実装が簡単なため、特定のアプリケーションではコスト効率が向上します。
制限事項
- 位置決め精度の欠如:速度制御はモーターの位置ではなく速度の維持に重点を置いているため、精密アプリケーションには適していません。
- 堅牢性が低い:大きな負荷変動などの大きな外乱に対して性能を維持するのが困難な場合があります。
ユースケース
- コンベアベルト、ファン、ポンプ。
- 位置精度を必要とせず連続動作が求められる用途。
- HVACシステムおよび低負荷産業用途。
| 制御方式 | 主な目的 | 精度 | 効率 | 適用分野 |
| 速度制御 | 速度の安定化 | 中程度 | 高い | コンベヤー、ファン |
| トルク制御 | トルクの安定化 | 高い | 中程度 | 負荷に敏感なタスク |
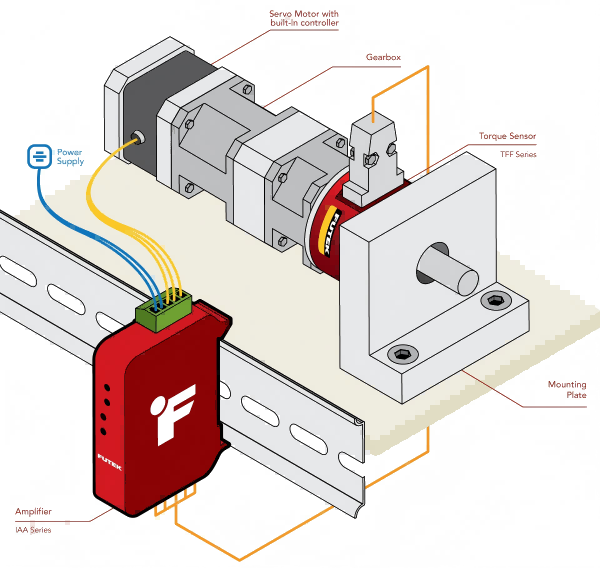
トルク制御
トルク制御は、サーボモーターのトルク出力を調整することに重点を置いています。この方法では、モーターは速度や位置に関係なく、特定のトルクを維持するために電流を調整します。トルク制御は、特定の速度や位置の維持よりも、一定の力やトルクが重要となるアプリケーションに不可欠です。
トルク制御は、試験機、プレス機、および精密な力制御を必要とするシステムで一般的に使用されています。
特長と利点
- 力制御:材料試験や製造プロセスなど、力の精密制御が求められる用途に最適です。
- 負荷感度:モーターはトルク出力を調整することで変化する負荷に適応し、安定した性能を確保します。
- 柔軟性:速度や位置の制御よりも、加えられる力の方が重要となる用途に適しています。
制限事項
- 複雑なセットアップ:トルクを効果的に制御するには、正確なトルク検知と高度なコントローラが必要です。
- 精度が低い:トルク制御には優れていますが、位置や速度に高い精度が求められるアプリケーションには効果が低くなります。
ユースケース
- テストベンチ、材料試験機、プレス機。
- ロボットアームにはフォースフィードバックが必要です。
- 精密な力の適用が必要な自動組立ライン。
| 制御方式 | 主な目的 | 精度 | 力制御 | 適用分野 |
| トルク制御 | トルクの安定化 | 中程度 | 高い | 材料試験 |
| 位置制御 | 位置精度 | 高い | 低い | ロボット工学、CNC |
サーボモーターの最適な制御戦略を決定する上で、アプリケーションの特定の要件が重要な役割を果たします。位置精度、速度の一定化、正確なトルク制御など、どのような制御方法を求めているかに関わらず、それぞれの制御方法には明確な利点とトレードオフがあります。システムを可能な限り効率的かつ効果的に動作させるには、サーボモーターメーカーはこれらの制御技術の違いを理解する必要があります。