ハイブリッドステッピングモーターメーカー
当社は、様々なフレームサイズ(20mmから110mm)、ステップ角、オプションに対応したハイブリッド型ステッピングモーターの設計・製造を専門としています。カスタマイズ可能な既製のハイブリッド同期ステッピングモーターでプロジェクトを開始するか、専任のエンジニアリングチームと連携して、お客様の特定の要件を満たすカスタムソリューションをご提案いたします。
カスタマイズ可能なオプションの一部を次に示します。
- 相構成: 2相、3相、4相、5相
- ステップ角度: 0.72度、0.9度、1.2度、1.8度
- 巻線構成:単極および双極
- シャフトオプション: 長さ、直径、形状(丸型、Dカット、キー付きなど)、材質
Home / ハイブリッド ステッピング モーター
成分
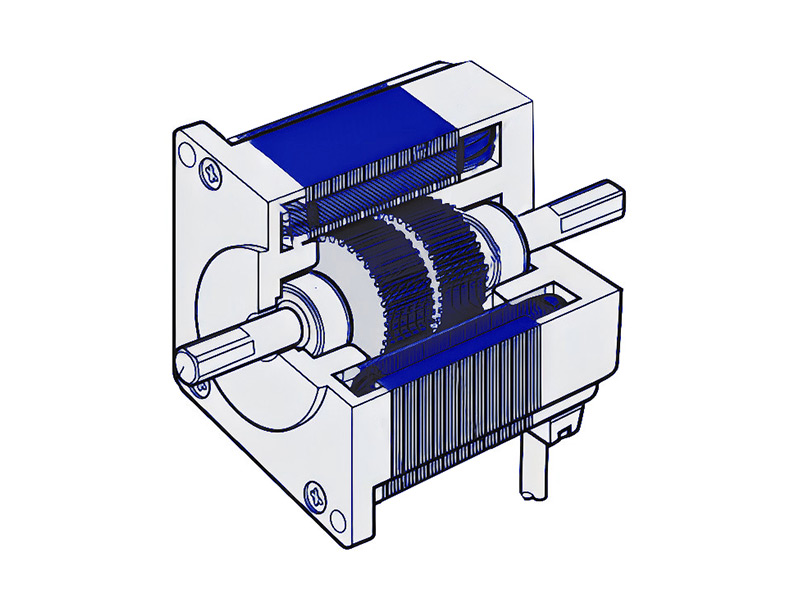
- ローター: ローターには永久磁石、渦電流損失を低減する積層コア、およびステーターとの精密な位置決めのための歯が付いています。
- ステーター: ステーターの複数の巻線が磁場を生成し、その歯がローターの歯と揃うことでトルクと精度が向上します。
- 軸: ローターを負荷に接続し、さまざまな構成(丸型、D カット、キー付き)が考えられます。
- ベアリング: ローターをサポートし、スムーズで低摩擦な回転を実現します。
- ハウジング: 内部コンポーネントを保護し、取り付けフランジが含まれる場合があります。
- エンドベル/キャップ: モーターの端を囲み、ベアリングとシャフトを支えます。
ステップ角度別
当社では、精度、解像度、アプリケーションの柔軟性の最適なバランスを実現するために、ハイブリッド ステッピング モーターにおいて標準、微細、カスタムのステップ角度を提供しています。
標準ステップ角度
- PM ステッピング モーターの場合は通常 7.5°、15°、または 18° です。
- 1 回転あたり 48、24、または 20 ステップになります。
- コスト、シンプルさ、機械的な解像度のバランスをとります。
- 汎用ドライバ IC で幅広くサポートされています。
- プリンター、自動販売機、回転表示器などに使用されます。
細かいステップ角度
- 標準より小さいステップ角度(例:1.8°、ハイブリッドの場合は0.9°、PMの場合は3.75°)。
- ステップ解像度が大幅に向上します。
- よりスムーズで正確な動きを実現します。
- 振動を低減し、低速性能を向上します。
- 医療機器、3D プリンター、カメラ位置決めシステムに使用されます。
カスタムステップ角度
- 特定の設計ニーズに応じてカスタマイズされたステップ角度 (例: 11.25°、5°、または 2.5°)。
- カスタムのローター/ステーター歯形状により実現されます。
- 独自のシステムやスペースが制限されたシステムでよく使用されます。
- カスタム ドライバー プログラミングまたはファームウェアの適応が必要です。
- カスタム自動化ツール、航空宇宙コンポーネント、小型ロボットに使用されます。
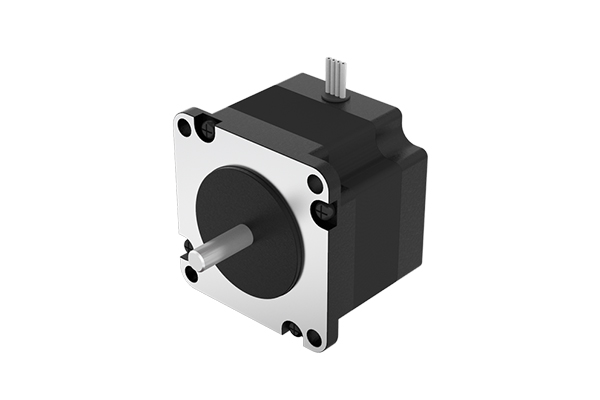
マウント構成別
当社では、さまざまな取り付け、スペース、パフォーマンスの要件を満たすハイブリッド ステッピング モーター用の NEMA 標準またはカスタム フレーム サイズを提供できます。
NEMAフレームサイズ
- 一般的なサイズには、NEMA 8、11、14、17、23、34、42 などがあります。
- 一貫した取り付けパターンにより、メーカー間で互換性があります。
- 自動化システムでの調達と交換が容易になります。
- 3D プリンター (NEMA 17)、CNC (NEMA 23)、ロボット工学、ラボ自動化に使用されます。
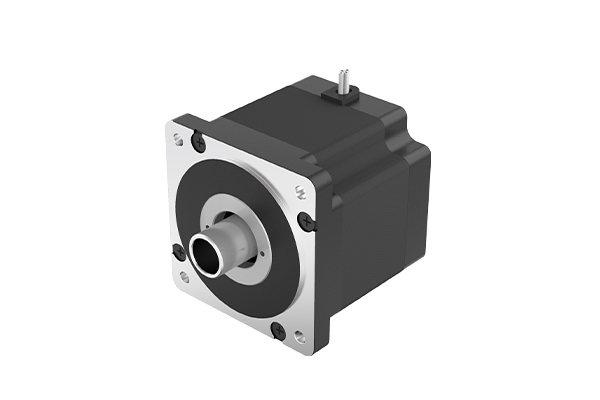
カスタムフレームサイズ
- 独自の機械的制約を満たすようにモーターの寸法を調整します。
- スペース、重量、熱性能を最適化できます。
- 非標準の取り付け穴、シャフト長さ、またはアスペクト比を許可します。
- 医療用インプラント、航空宇宙機構、コンパクトカメラシステム、OEM 専用機械などに使用されます。
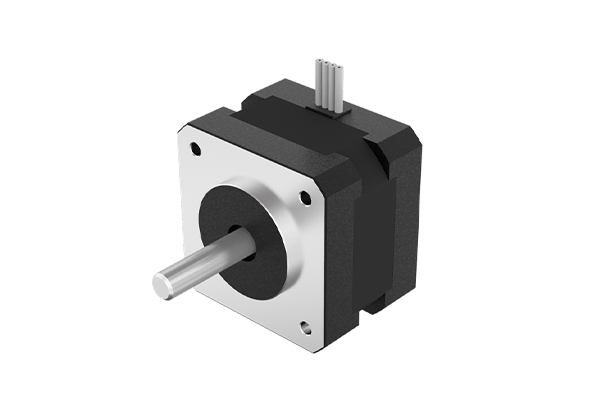
モーションタイプ別
当社は、直線または回転モーション オプションを備えたハイブリッド ステッピング モーターを提供しており、オープン ループまたはクローズド ループ制御システムを通じて正確な位置決めを実現します。
0からNまで - フルモーターソリューション
駆動方式別
当社は、シンプルさ、トルク出力、アプリケーション固有のパフォーマンス ニーズをバランスよく満たしながら、ハイブリッド ステッピング モーター用のユニポーラおよびバイポーラの駆動方式を提供しています。
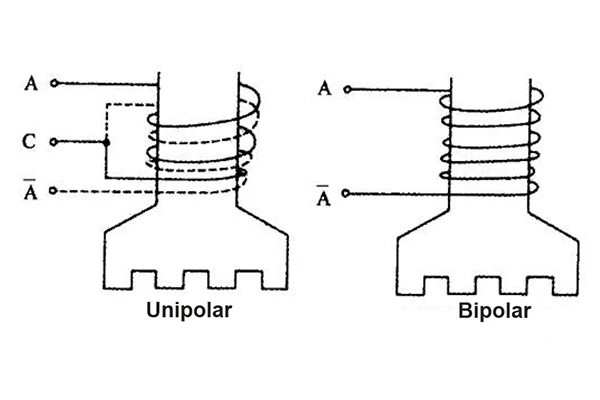
ユニポーラドライブ
- センタータップコイル巻線を採用
- 電流はコイルの半分ごとに一方向にのみ流れる
- よりシンプルな駆動回路(多くの場合、トランジスタ数が少ない)
- より高速なスイッチング応答
- 基本的なロジックやマイクロコントローラで制御するのが簡単
- 低電力ロボット、趣味のCNC、基本的な位置決めシステムに使用されます
バイポーラドライブ
- センタータップなしでフルコイルを使用
- すべての巻線は両方向に電流を流す。
- 各相にHブリッジドライバが必要
- 同じモーターサイズでより高いトルクを実現
- 高速でもスムーズな操作性を実現
- 産業用CNC、3Dプリンター、医療用モーションコントロール、プロフェッショナルオートメーションに使用
組み合わせオプション
アプリケーションのニーズに応じて、当社のハイブリッド ステッピング モーターは、最適なパフォーマンスを実現するエンコーダー、ブレーキ、ギアボックス、統合ドライバー コントローラーの組み合わせを提供します。
ドライバーとコントローラーを統合
- ドライバーとコントローラーを内蔵しており、配線が簡素化され、外部コントローラーの必要性が軽減されます。
- インストールの簡素化、配線の削減、省スペース化により、効率的な統合が可能になります。
アプリケーション

CNC機械: CNC マシンでは、ワークピースと切削工具の配置を正確に制御するために、ハイブリッド ステッピング モーターがよく使用されます。
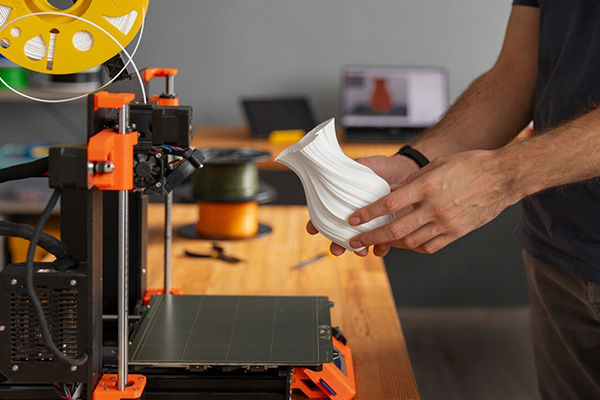
3Dプリンター: 正確な 3D 印刷に必要な精度と再現性を実現します。

医療機器: 自動薬剤送達システムや診断装置など、正確な位置決めを必要とする医療機器に使用されます。

産業オートメーション: ハイブリッド ステッピング モーターは、コンベア ベルト、ロボット アーム、組立ラインを制御するさまざまな産業オートメーション システムで使用されます。

ロボット工学: ロボットアームや無人搬送車 (AGV) などの高精度ロボットアプリケーションでは、ハイブリッド ステッピング モーターがよく使用されます。

航空宇宙: 航空宇宙アプリケーションでは、ハイブリッド ステッピング モーターは、衛星測位やその他の重要なタスクの精密制御に使用されます。

舞台照明と効果: これらは、舞台照明や特殊効果機器で使用され、照明やその他の舞台要素の動きや位置を制御します。

光学機器: ハイブリッド ステッピング モーターは、光学機器やカメラでレンズの正確な位置決めとフォーカス制御に使用されます。
よくある質問
ハイブリッド リニア アクチュエータは、用途や利点の点で、従来のハイブリッド ステッピング モーターとどう違うのでしょうか?
ハイブリッド リニア アクチュエータは、ロボット工学やオートメーションにおける回転タスクに使用される従来のハイブリッド ステッピング モーターとは異なり、CNC 機械や 3D プリンターでの高精度タスクのために回転運動を直線運動に変換します。
ハイブリッド ステッピング モーターのステップ角度はパフォーマンスにどのような影響を及ぼしますか?
ステップ角度によってモーターの解像度が決まります。ステップ角度が小さいほど (例: 0.9°) 精度が高く動きがスムーズになりますが、ステップ角度が大きいほど (例: 1.8°) 動きが速くなりますが解像度は低くなります。
永久磁石ステッピングモーターではなくハイブリッドステッピングモーターを使用する利点は何ですか?
ステップ角度によって解像度が決まります。角度が小さいほど (例: 0.9°) 精度が高くなり、角度が大きいほど (例: 1.8°) 動きが速くなります。
ハイブリッド ステッピング モーターはマイクロステップをサポートできますか?
はい、ハイブリッド ステッピング モーターはマイクロステップに対応しており、各ステップをより小さな増分に分割して、より優れた制御とスムーズな動作を実現します。
ハイブリッド ステッピング モーターは、フィードバック システムなしでどのようにして正確な位置決めを実現するのでしょうか?
ハイブリッド ステッピング モーターは、ステーター巻線への通電を制御して正確な位置決めを実現し、正確に予測および制御できる個別のステップでローターを動かします。
ハイブリッド ステッピング モーターの IP65 認証とはどういう意味ですか?
IP65 認証を取得したモーターは、低圧水流に耐え、防塵性も備えているため、困難な状況でも使用できます。
統合ドライバとコントローラはハイブリッド ステッピング モーターにどのようなメリットをもたらしますか?
統合されたドライバとコントローラにより、インストールが簡素化され、配線の複雑さが軽減され、モーターとドライバ間の最適な互換性が確保されるため、システム全体の信頼性が向上します。
ハイブリッド ステッピング モーターにはどのようなメンテナンス方法が推奨されますか?
推奨されるメンテナンスには、検査、清掃、潤滑、接続の確認、温度の監視、位置合わせと負荷管理の確保が含まれます。
